

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
| ||||||
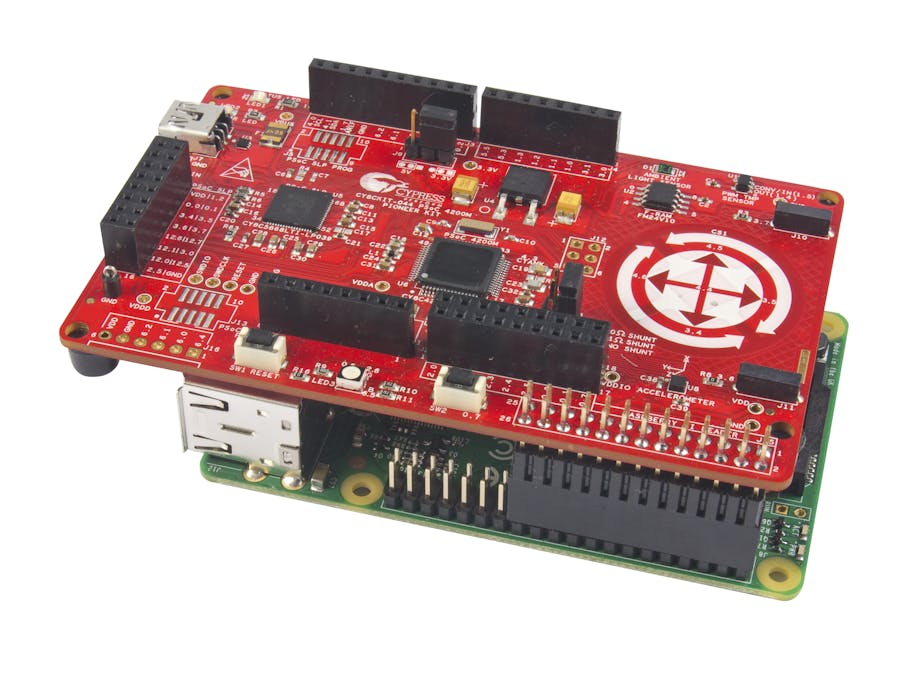
This project shows how a PSoC 4M device can function as a sensor hub device. The PSoC can interface with multiple digital and analog sensors. In this project, the PSoC interfaces with an I2C-based accelerometer, a PWM-based temperature sensor, and an analog ambient light sensor.
The firmware measures the ambient temperature, ambient light, and the accelerometer values from the sensors and stores them in global variables. The firmware also implements a Real-Time Clock (RTC) functionality and stores this information in global variables and allows real time monitoring of data in the system.
The firmware also logs the temperature and acceleration data along with the RTC timestamp information onto the onboard F-RAM memory device every one second. Data is stored in the format [timestamp hours, timestamp minutes, timestamp seconds, temperature data integer part, temperature data fractional part, x-axis acceleration MSB, x-axis acceleration LSB, y-axis acceleration MSB, y-axis acceleration LSB, z-axis acceleration MSB, z-axis acceleration LSB]. If the F-RAM is full, the firmware rewrites the data from the beginning of the F-RAM.
These values are read back from the F-RAM and then transmitted through the UART to the Raspberry Pi. Minicom is a text-based terminal emulation program running on the Raspberry Pi. This project uses Minicom to view the UART output on the Raspberry Pi.
/*****************************************************************************
* Project Name : CY8CKIT_044_Raspberry_Pi_Sensor_Hub
* Version : 1.0
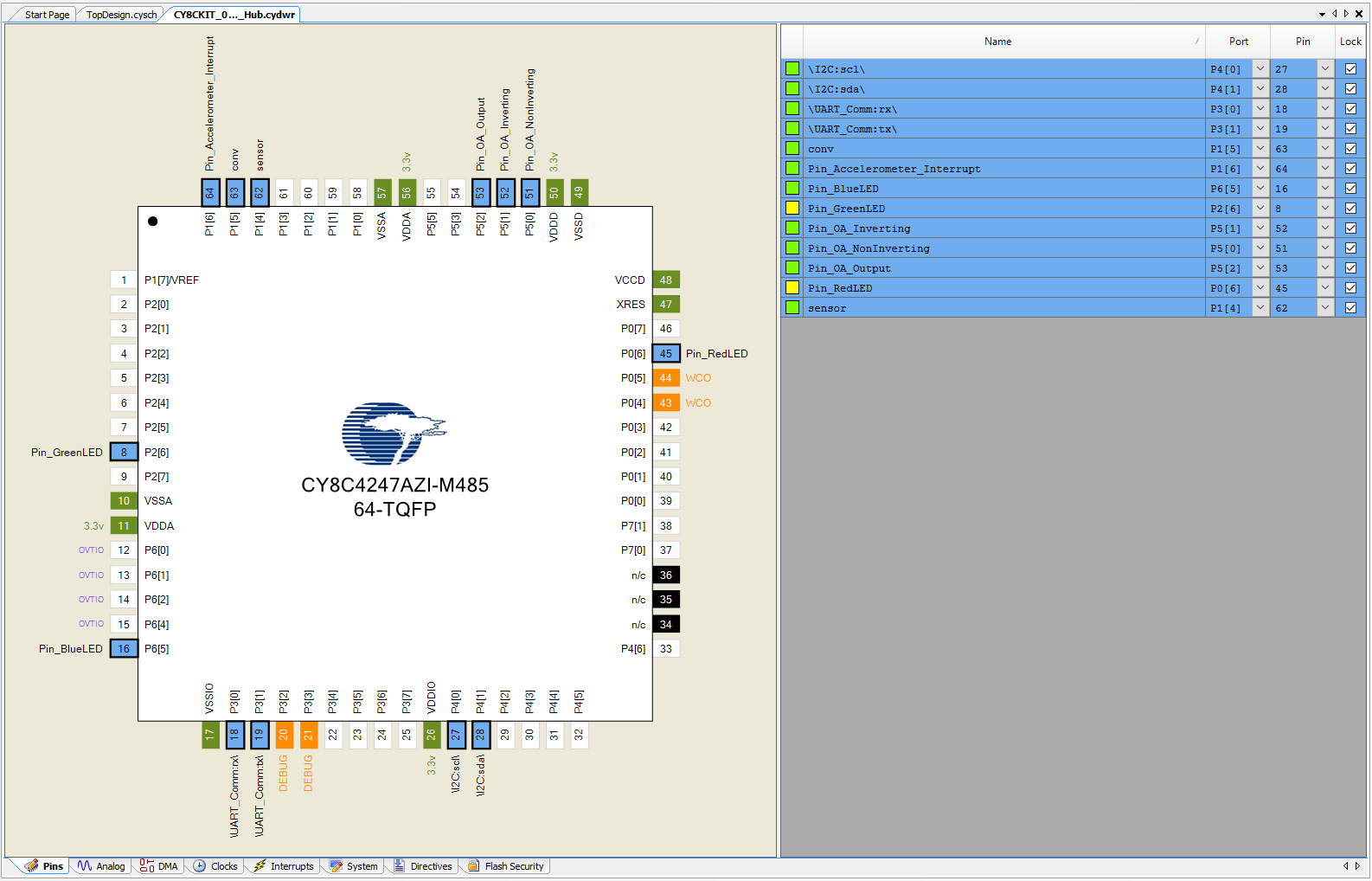
* Device Used : CY8C4247AZI-M485
* Software Used : PSoC Creator 3.2
* Compiler Used : ARM GCC 4.8.4
* Related Hardware : CY8CKIT-044 PSoC 4 M-Series Pioneer Kit
/********************************************************************************
* Theory of Operation: The PSoC 4 M-Series Pioneer Kit has an onboard accelerometer,
* an ambient light sensor, and a PWM temperature sensor. This project collects
* data from all these sensors and stores the data in global variables. The project
* also has a Real Time Clock (RTC) which is used to keep track of time.
* The PSoC 4200M stores the latest sensor data (temperature and acceleration)
* along with the timestamp data collected from the RTC to the onboard F-RAM every
* one second. The data is stored in the order : [hours, minutes, seconds,
* temperature, x axis acceleration, y axis acceleration, z axis acceleration].
* The same data is read back every one second and sent through UART along with the
* location information of data in F-RAM. The data sent through UART can be directly
* accessed from a Raspberry Pi connected to the Raspberry Pi header on CY8CKIT-044.
*
* The accelerometer is configured to generate an interrupt whenever an
* acceleration is detected. PSoC 4200M reads the acceleration data when
* accelerometer triggers the interrupt. The acceleration data, ambient light
* sensor data, and the temperature value are stored in global variables and can
* be accessed using the uC/Probe tool.
* Note that the ambient light sensor data is logged to the global variable
* "uC_Probe_ambientLight" automatically using the PSoC 4200M DMA.
*
* This project also allows the uC/Probe tool to change the color of onboard RGB
* LED according to the value set by RGB color palette in the uC/Probe.
*****************************************************************************/
#include "project.h"
#include "main.h"
#include "accelerometer.h"
#include "FRAM_Control.h"
#include "stdio.h"
/*****************************************************************************
* Local Function Prototypes
*****************************************************************************/
static void UpdateLEDColor(void);
CY_ISR_PROTO(Accelerometer_Interrupt);
/*****************************************************************************
* Global Variable Declarations
*****************************************************************************/
/************************************
* Micrium uC/Probe Global Variables
************************************/
int16 uC_Probe_ambientLight = ZERO;
int8 uC_Probe_temperatureInteger = ZERO;
int16 uC_Probe_x_dirMovement = ACC_NO_MOVEMENT;
int16 uC_Probe_y_dirMovement = ACC_NO_MOVEMENT;
int16 uC_Probe_z_dirMovement = ACC_NO_MOVEMENT;
uint32 uC_Probe_RGBPalette = WHITE;
uint8 uC_Probe_Hours = ZERO;
uint8 uC_Probe_Minutes = ZERO;
uint8 uC_Probe_Seconds = ZERO;
/**********************************/
uint8 temperatureFractional = ZERO;
uint8 acclerometer_configured = FALSE;
uint8 accRequest = FALSE;
uint8 oneSecondTrigger = FALSE;
uint8 displayErrorOnce = FALSE;
int main()
{
/* Local Variables */
uint8 tempError = FALSE;
int16 temperatureReturnVal = ZERO;
uint32 ledColorVal = ZERO;
char uartString[MAX_STRING_SIZE] = {' '};
/* Dummy variable to read the interrupt release register of accelerometer. */
uint8 dummy = ZERO;
/* Start and initialize all the peripherals. Enable the global interrupt. */
Initialize_Project();
/* Initialize the accelerometer after a self-test. */
InitializeAccelerometer();
for(;;)
{
/* accRequest is set to TRUE when accelerometer generates an interrupt.
* Configured in isr_Accelerometer */
if(accRequest == TRUE && acclerometer_configured == TRUE && stopDataAccess == FALSE)
{
accRequest = FALSE;
/* Read the accelerometer data and update the global variables. */
ReadAccelerometer(&uC_Probe_x_dirMovement, &uC_Probe_y_dirMovement, &uC_Probe_z_dirMovement);
/* Read interrupt release register to clear the latched interrupt. */
Accelerometer_RegRead(ACC_INT_REL, &dummy);
}
/* Check if temperature measurement is complete. */
tempError = Temperature_Sense_ConversionStatus();
/* If conversion is complete, update the temperature variable. */
if((tempError & Temperature_Sense_STATUS_COMPLETE) == Temperature_Sense_STATUS_COMPLETE)
{
/* Read the temperature value. */
temperatureReturnVal = Temperature_Sense_GetTemperature(DEFAULT_SENSOR);
/* Temperature measured is in 1/100th of a degree Celsius.
* Scale the value for comfortable viewing in uC/Probe. */
uC_Probe_temperatureInteger = temperatureReturnVal/DIVISOR_HUNDRED;
/* Find the fractional part of temperature data for logging in the F-RAM. */
if(temperatureReturnVal < ZERO)
{
temperatureFractional = DIVISOR_HUNDRED - temperatureReturnVal%DIVISOR_HUNDRED;
}
else
{
temperatureFractional = temperatureReturnVal%DIVISOR_HUNDRED;
}
/* Trigger next conversion when the current conversion is complete. */
Temperature_Sense_Trigger();
}
/* Update the PWMs if the global variable controlled by uC/Probe has changed. */
if(ledColorVal != uC_Probe_RGBPalette)
{
/* Save the current value to the local variable. */
ledColorVal = uC_Probe_RGBPalette;
/* Update the LED brightness corresponding to the changes in uC/Probe interface. */
UpdateLEDColor();
}
/* Update the F-RAM with sensor data every one second. Update the RTC */
if(oneSecondTrigger == TRUE && stopDataAccess == FALSE)
{
oneSecondTrigger = FALSE;
FRAM_SaveSensorData();
FRAM_ReadSensorData();
}
if(displayErrorOnce == TRUE)
{
sprintf(uartString, "\n \rI2C Arbitration lost. Data logging stopped.");
UART_Comm_UartPutString(uartString);
sprintf(uartString, "\n \rPress SW1 to reset the device.");
UART_Comm_UartPutString(uartString);
displayErrorOnce = FALSE;
}
}
}
/*******************************************************************************
* Function Name: Initialize_Project
********************************************************************************
* Summary:
* Starts and initializes all the Components in the project. Enables
global interrupt.
*
* Parameters:
* void
*
* Return:
* void
*
*******************************************************************************/
void Initialize_Project(void)
{
/* Enable global interrupt. */
CyGlobalIntEnable;
/* Start the Opamp hardware. */
Opamp_Start();
/* Enable and start ADC block. */
ADC_Start();
/* Enable the DMA Component. This API also sets the
* source and destination addresses. */
DMA_Start((void *)ADC_SAR_CHAN0_RESULT_PTR, (void *)&uC_Probe_ambientLight);
/* Start ADC conversions. */
ADC_StartConvert();
/* Enable and start accelerometer I2C block. */
I2C_Start();
/* Enable the interrupt from accelerometer. */
isr_Accelerometer_Interrupt_StartEx(Accelerometer_Interrupt);
/* Start the TMP05 temperature sensor Component. */
Temperature_Sense_Start();
/* Trigger the temperature sensor Component to start measurement. */
Temperature_Sense_Trigger();
/* Enable and start the PWM blocks. */
PWM_Red_Start();
PWM_Green_Start();
PWM_Blue_Start();
/* Enable and start UART communication block. */
UART_Comm_Start();
/* Start RTC. The RTC is configured to use the Watch Dog Timer0. */
RTC_Start();
/* Link the WatchDog Timer Isr to the function which updates F-RAM.
* This will allow the F-RAM to be updated as per the settings in the
* CY8CKIT_044_Raspberry_Pi_Sensor_Hub.cydwr. The WatchDog Timer2 is
* configured to generate an interrupt every 1 second. */
CySysWdtSetIsrCallback(CY_SYS_WDT_COUNTER2, SetTriggerFlag);
/* Wait for 50ms for the accelerometer to start up. */
CyDelay(ACC_STARTUP_TIME);
}
/*******************************************************************************
* Function Name: UpdateLEDColor
********************************************************************************
* Summary:
* Updates the LED color based on the uC/Probe color palette value.
*
* Parameters:
* void
*
* Return:
* void
*
*******************************************************************************/
static void UpdateLEDColor(void)
{
uint8 alpha = ZERO;
uint8 red = ZERO, green = ZERO, blue = ZERO;
uint16 pwm_red = ZERO, pwm_green = ZERO, pwm_blue = ZERO;
/* Convert the 32-bit Red, Green, Blue, Alpha (RGBA)
* value to individual 8-bit numbers. */
alpha = HI8(HI16(uC_Probe_RGBPalette));
red = LO8(HI16(uC_Probe_RGBPalette));
green = HI8(LO16(uC_Probe_RGBPalette));
blue = LO8(LO16(uC_Probe_RGBPalette));
/* Convert the RGBA value received from uC/Probe to RGB value. */
pwm_red = (((0xFF - alpha) * 0xFF) + (alpha * red)) >> BRIGHTNESS_SATURATION_SHIFT;
pwm_green = (((0xFF - alpha) * 0xFF) + (alpha * green)) >> BRIGHTNESS_SATURATION_SHIFT;
pwm_blue = (((0xFF - alpha) * 0xFF) + (alpha * blue)) >> BRIGHTNESS_SATURATION_SHIFT;
/* Update the LED brightness. */
PWM_Red_WriteCompare(pwm_red);
PWM_Green_WriteCompare(pwm_green);
PWM_Blue_WriteCompare(pwm_blue);
}
/*******************************************************************************
* Function Name: SetTriggerFlag
********************************************************************************
* Summary:
* Sets the global variable oneSecondTrigger to TRUE. This function is called
* every one second automatically by the WDT interrupt.
*
* Parameters:
* void
*
* Return:
* void
*
*******************************************************************************/
void SetTriggerFlag(void)
{
oneSecondTrigger = TRUE;
}
/*******************************************************************************
* Function Name: isr_Accelerometer_Interrupt_Interrupt
********************************************************************************
* Summary:
* Interrupt routine for accelerometer interrupt. Sets the accRequset flag,
* clears the GPIO interrupt and updates the RTC.
*
* Parameters:
* void
*
* Return:
* void
*
*******************************************************************************/
CY_ISR(Accelerometer_Interrupt)
{
accRequest = TRUE;
Pin_Accelerometer_Interrupt_ClearInterrupt();
}
/* [] END OF FILE */
PSoC4M_Raspberry_Pi_Sensor_Hub.cywrk.zip
C/C++No preview (download only).





{kind=link}
Comments