



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
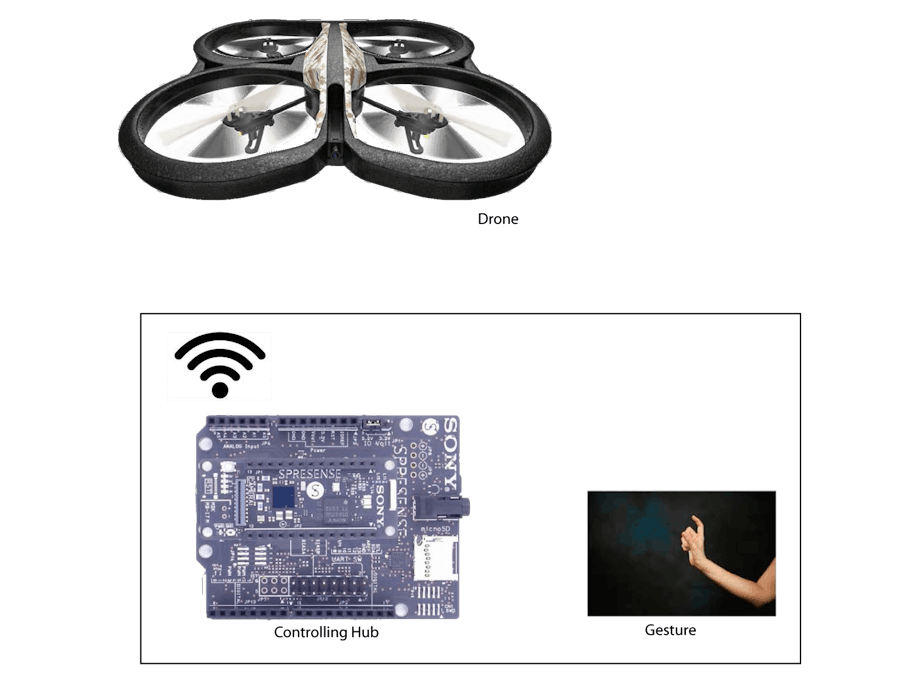
Parrot AR.Drone is a remote-controlled flying quad-copter helicopter built by the French company Parrot. The controlling system of the drone is based on mobile apps. Controlling the drone using apps is not comfortable. With this regard, the project proposed is a portable controlling system for the AR.Drone based human gesture.
The drone has linear and rotational movements. Linear movements are left, right, forward, and backward. Rotating-left and rotating-right are the rotational movements. Due to the limitation of gesture sensor we have designed the remote control for the AR.Drone.
A Raspberry Pi receives the gesture information from spresense board via usb-serial port. This information are used for controlling the AR.Drone. An open source Python-based SDK is available for controlling the AR. Drone by using a Python script.
Preparing the Development Environment(Arduino IDE, Taken from Spresense Arduino Library Getting Started Guide)
The following steps will describe how to install the Spresense Arduino Library into the Arduino IDE using the Board Manager.
- Start Arduino IDE.
- Open the preferences in [File→Preferences].
- Copy and paste https://github.com/sonydevworld/spresense-arduino-compatible/releases/download/generic/package_spresense_index.jsoninto the field called Additional Boards Managers URLs:
- Open the
Boards Manager[Tools→Board→Boards Manager].
.
- Search for Spresense. Once found in the list, select it and click install. If the package list fails to download, a possible reason is your network connection uses a proxy. To set the proxy, navigate to [File → Preferences → Network].
The Spresense board package size is above 150 MB. Please be aware of the impact to your network usage limits and charges.
- The Spresense Arduino Library is now installed.
For more details, please refer this page.
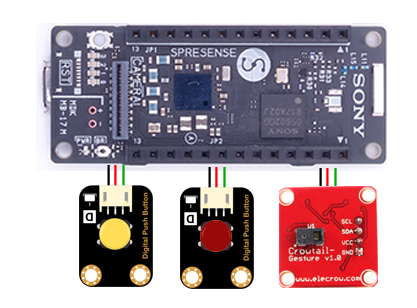
Pin DiagramGesture sensor to Sony Spresense Board
SCL --------- SCL
SDA --------- SDA
VCC --------- 3.3V
GND --------- GND
All Buttons
VCC -------- 3.3V
GND -------- GND
SW1 -------- D8 (take off switch)
SW2 -------- D9 (landing Switch)
The Raspberry Pi is a single-board computer. The operating system of the Pi is mainly Rasbian. For this project, we need to download and install the latest version of Rasbian OS. Since Raspberry Pi is a headless device, we need to configure it via SSH shell in Linux or PuTTY in windows. We clone the Git repository which contains all the SDK of the drone and source for using our prototype controller.
After that, we just run the Python script for initializing the controller. Before initializing the controller, be sure that the AR.Drone is connected with the Raspberry Pi via WiFi network. Please check the demonstration video for controlling the drone via proposed controller.
Attention: Drones can be dangerous!!!!!!! So, keep suitable space before flying the drone.
DemoReference









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments