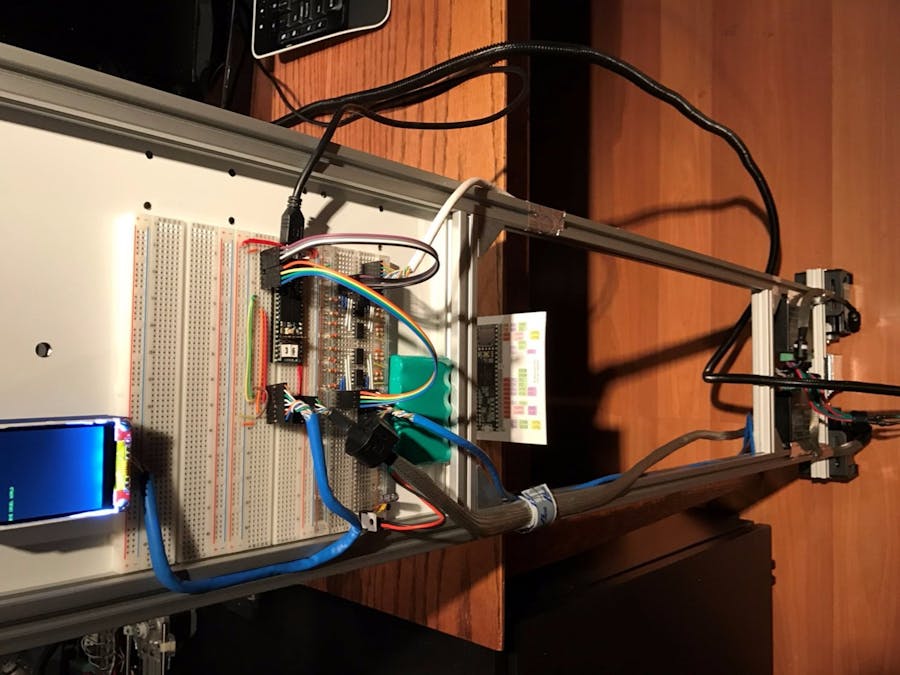
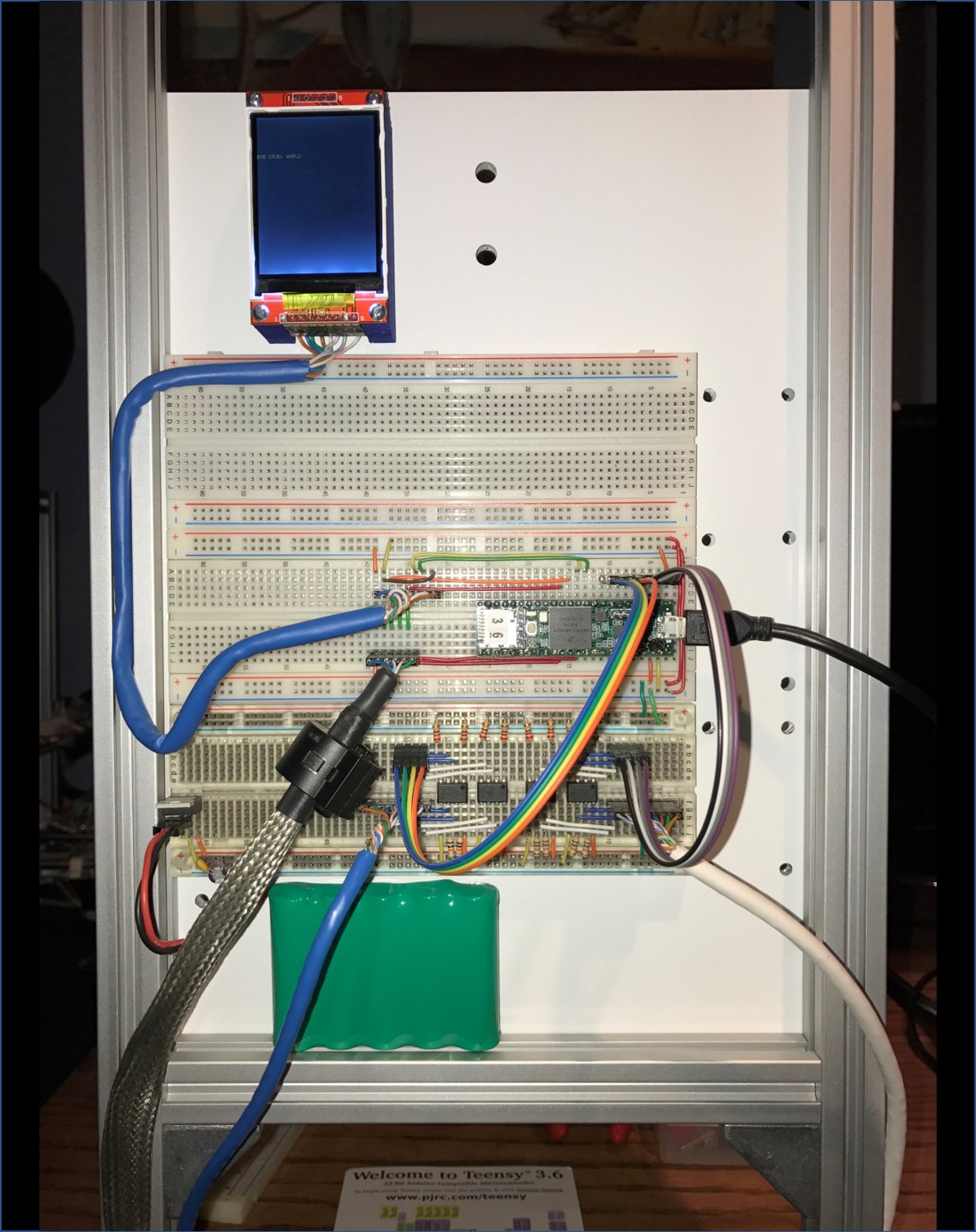
I'm developing the Falling-Up Robot (F.U.R.), a very tall balancing inverted pendulum bot, using the Teensy 3.6 microcontroller with the Arduino IDE 1.6.12. I want to learn feedback control systems through practice on an inherently unstable system. It's 6 feet tall to stand with you and so I can tinker with the main board at desk level. So far, the brain and chassis is in place, and the basic balancing control system is active to keep it from falling over.
I used stepper motors to take advantage of high torque at low RPM and zero backlash. This allows very steady stand-still performance. But dealing with the stepper-induced mechanical vibration was an issue. This was mostly solved with analog filters on the IMU and with an Extended Kalman Filter in software.
The video shows the F.U.R. balancing very still, and responds nicely to raps. Thank you.
E.V.L.
4/3/2017 update:
I got the XBEE communication working with the Teensy 3.6 mcu. I can now send motion commands to the Falling-Up Robot. Able to yaw and translate the 6-foot robot while maintaining tilt stability. It's no longer tethered to the USB port and the power supply unit. See latest video below. Recommend headphones. See Part-2 video (headphones recommended):






{kind=link}
Comments