



Today we will make an Arduino controlled robot. It is somewhat similar to my previous project. The only difference is that instead of using a gyroscope sensor I used a Joystick module. The robot is controlled wirelessly using the Rf (ASK) transmitter and receiver module. Both the circuits consist of two Arduino Boards and both are powered using 9 V batteries.
Working -
The working of this project is quite straight forward. The Joystick module gives analog values for the X and Y axis movement. This values are then compared with the set values by the help of various if else statements. And according to that a character is sent to the receiver. Like in this case a character 'a' is sent for forward movement of the robot.
These characters are then received by the Rf receiver at the other end. The receiver's job is to just receive the character and send it to the Arduino. The Arduino then moves the robot according to the sent character. The movement is controlled by the L293d Motor driver module. This is the basic working of the project. Now let's head on to build this robot.
Step 1: Get the Supplies!!!Buying supplies is a crucial part for any project. And most importantly at right prices. And for that I recommend you to buy them from UTSource.net website. They provide good quality components at low cost and fast shipping. They also provide high quality PCB's for manufacturers and prototypers. Do check them out now and avail their free one month Plus membership trial which gives a lot of benefits to customers.
Now let's take a quick look at the things we need to build this robot :
1. Arduino Uno Board x 2
2. Joystick Module x 1
3. Rf transmitter and receiver module x 1
4. Motordriver Module (L293D) x 1
5. Breadboard x 2
6. Metal Chassis with wheels and motors.
7. Led
8. Header wires
9. Batteries(9 V)
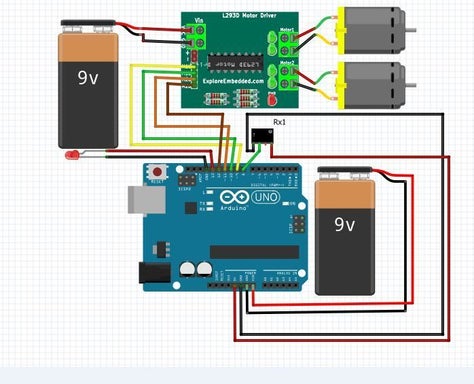
Step 2: Circuit DiagramThe circuit diagram for this project is quite simple. And it takes about only 10 minutes to build this project. The connections are shown in the circuit diagram above. The joystick module is connected to two analog inputs and the transmitter is connected to a digital pin. Here I used pin 12. You can use the serial port but that will cause problems while uploading the sketch. So instead use the Virtual wire library and make some other pin a tx pin.
The receiver part consists of the motor driver module and the RF receiver. Again here we used the Virtual wire library. A led is connected to get the status if a charater is received or not. Both of the boards are powered using 9 V batteries. And one separate battery is used to power the motor driver module.
Step 3: Upload the SketchNow let's upload the sketches to the Arduino Boards. You can get the sketch from below.
// TRANSMITTER CODE
#include <VirtualWire.h>
const int X_AX = A0;
const int Y_AX = A1;
void setup()
{
Serial.begin(9600);
Serial.println("setup");
vw_setup(2000);
vw_set_tx_pin(12);
}
void loop()
{
int xval = analogRead(X_AX);
int yval = analogRead(Y_AX);
if(xval<=261&&xval>=0)
{
char *msg2 = "a";//send a to the receiver
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("a");
}
else if(xval<=1023&&xval>=782)
{
char *msg2 = "b";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("b");
}
else if(yval<=261&&yval>=0)
{
char *msg2 = "c";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("c");
}
else if(yval<=1023&&yval>=782)
{
char *msg2 = "d";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("d");
}
else
{
char *msg2 = "e";
vw_send((uint8_t *)msg2, strlen(msg2));
vw_wait_tx();
Serial.println("e");
}
}
// RECIEVER CODE
#include <VirtualWire.h>//Motor A right
const int motorPin1 = 9; // Pin 9 of L293D
const int motorPin2 = 10; // Pin 10 of L293D
//Motor B left
const int motorPin3 = 11; // Pin 11 of L293D
const int motorPin4 = 12; // Pin 12 of L293D
void setup()
{
Serial.begin(9600);
Serial.println("setup");
vw_setup(2000);
vw_set_rx_pin(8);
vw_rx_start();
pinMode(13, OUTPUT);
//digitalWrite(13, HIGH);
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}if (vw_get_message(buf, &buflen))
{
int i;
for (i = 0; i < buflen; i++)
{
if(buf[i] == 'a')//if button a is pressed.... i.e.forward buton
{
digitalWrite(13, HIGH);
Serial.println("Forward");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);//FORWARD
digitalWrite(motorPin3, LOW );
digitalWrite(motorPin4, HIGH);
}
if(buf[i] == 'b')
{
digitalWrite(13, HIGH);
Serial.println("Backward");
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);//REVERSE
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
}
if(buf[i] == 'c')
{
digitalWrite(13, HIGH);
Serial.println("Left");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);//LEFT
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
}
if(buf[i] == 'd')
{
digitalWrite(13, HIGH);
Serial.println("Right");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);//RIGHT
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
if(buf[i] == 'e')
{
digitalWrite(13, LOW);
Serial.println("Stop");
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);//STOP
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
Serial.print(" ");
}
Serial.println("");
}
}Once you upload the code connect the batteries and give your project a run. If the robot moves in the opposite direction of the joystick then just swap the motor wires.
Step 4: Working of the ProjectHere I have attached a gif file and a small video clip showing the working of this project. If you enjoy the content I make, then don't forget to share this instructable with your friends. Also follow me because I come up with project like this very often. If you have any queries regarding this project, comment them below. I will try my best to help you. That's it for now. See you'll with another awesome project. Thank you.
.


{kind=link}
Comments