


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The main idea of this project is to make a Function Generator using Hexabitz Module, we will generate a three-wave signal( sine wave, Triangle wave, sawtooth wave ) using the H15R0 DAC Hexabitz module.
How to build :
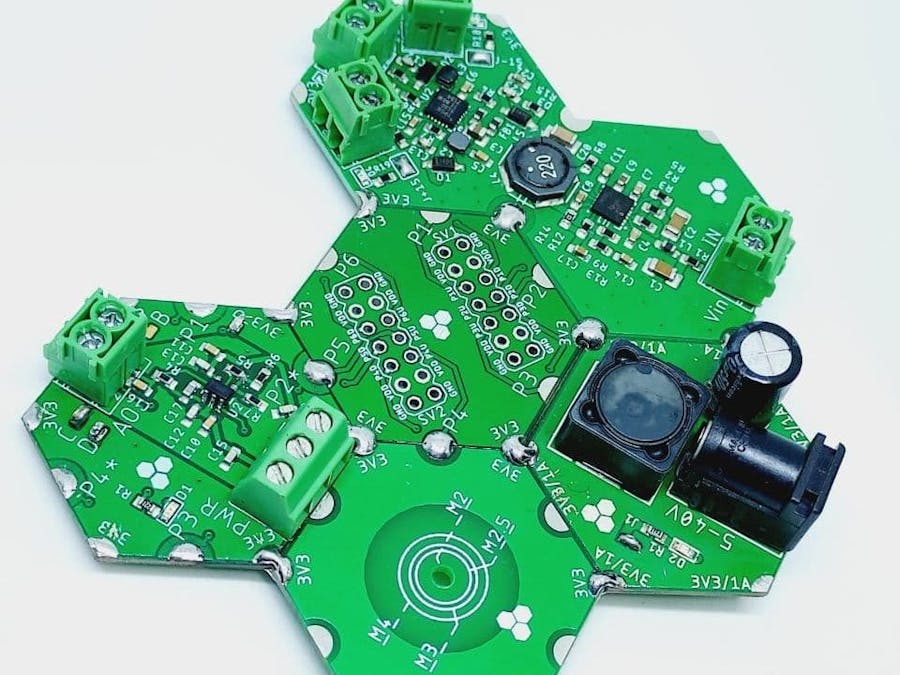
The module H15R00 needs Supply power +15V -15V +3.3V so we use the power module H38R0 and connect it as Figure below.we should supply the circuit with +15V to +30V we use in this project simple +24V power supply.
the main idea of the switch power supply is to convert the input supply +24V to +5V by using the Synchronous buck/flyback convert LM5160DNT. connected as schematic below.
we use the +5V to supply two circuits first one using TPS65130RGERT to generate +15V -15V, another one generates 3.3V using TPS76433DBVT.
Now we connect the power supply output to the H15R00 module as the figure below.
Function Generator after enclosure 3d printed box.we connect the connections as figures below
then we put the circuit inbox and solid the switches on P1, P3, P4.
Final project
we used a variable resistor (connected to the top & bottom to P5 ) to control the frequency and amplitude of the signal generated by the circuit.the three switches connected to P3, P4, P1.





Comments