from m5stack import *
from m5stack_ui import *
from uiflow import *
import module
import time
import unit
screen = M5Screen()
screen.clean_screen()
screen.set_screen_bg_color(0xfb0101)
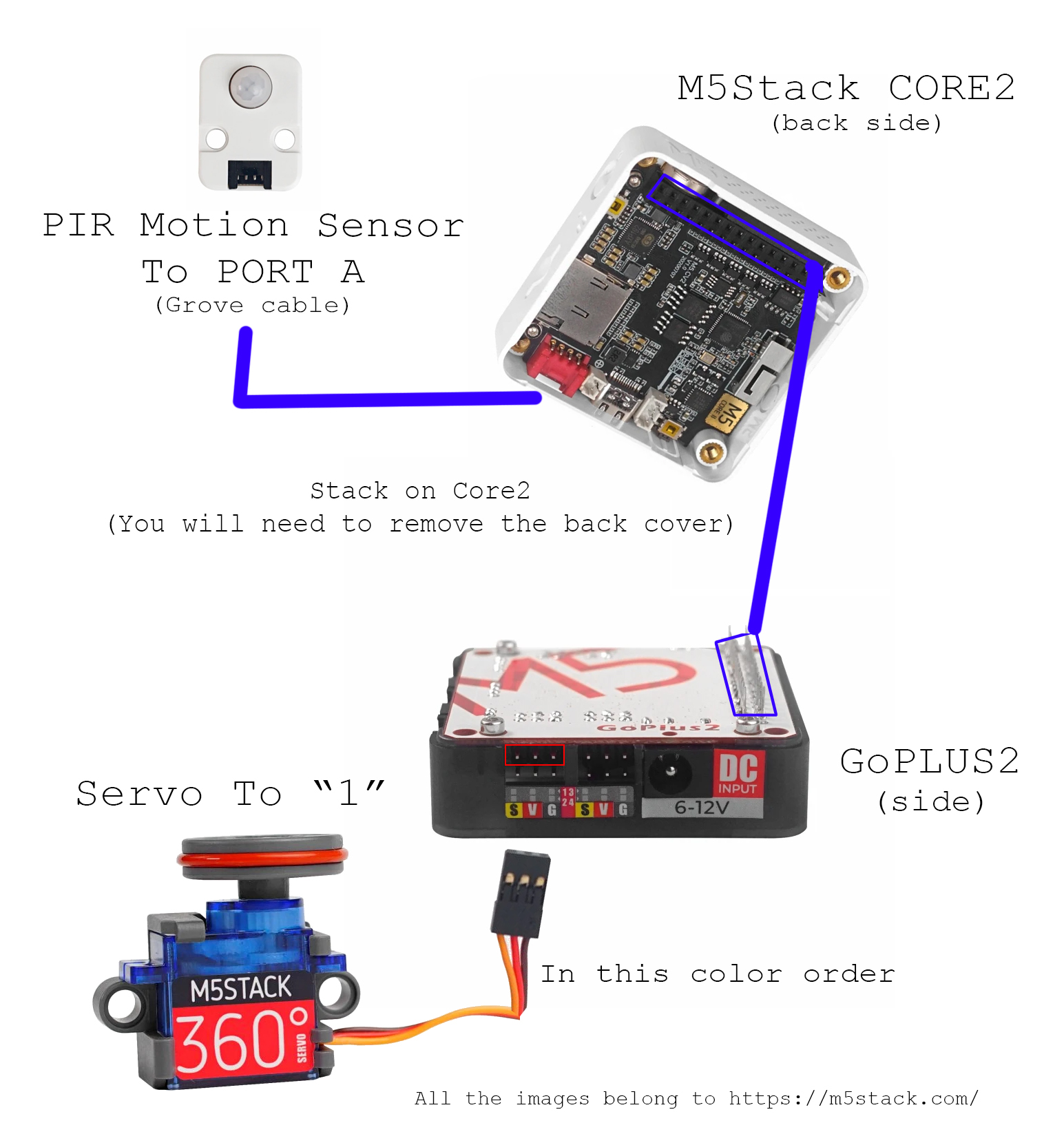
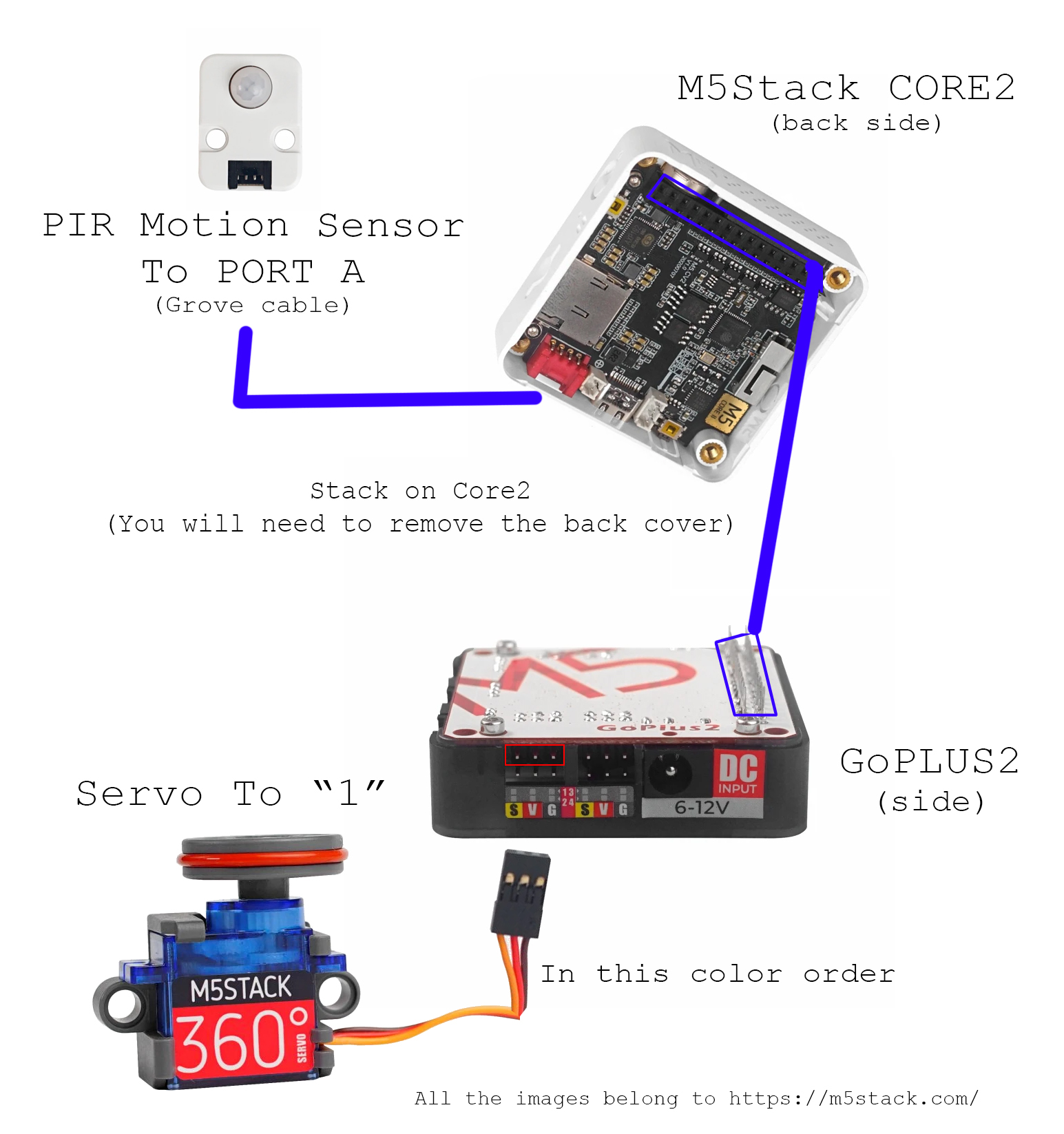
pir0 = unit.get(unit.PIR, unit.PORTA)
A = None
B = None
D = None
C = None
go_plus_2 = module.get(module.GOPLUS2)
JingleServoBells = M5Btn(text='Bells!', x=60, y=20, w=200, h=200, bg_c=0x15ff00, text_c=0x000000, font=FONT_MONT_32, parent=None)
def JingleServoBells_pressed():
global A, B, D, C
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(0)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms((D * 2))
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms((D * 4))
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
pass
JingleServoBells.pressed(JingleServoBells_pressed)
A = 2000
B = 1000
C = 1500
D = 250
while True:
if (pir0.state) == 1:
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(0)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms((D * 2))
go_plus_2.set_servo_plus(go_plus_2.S1, B)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms((D * 4))
go_plus_2.set_servo_plus(go_plus_2.S1, A)
wait_ms(D)
go_plus_2.set_servo_plus(go_plus_2.S1, C)
wait_ms(2)






{kind=link}
Comments