


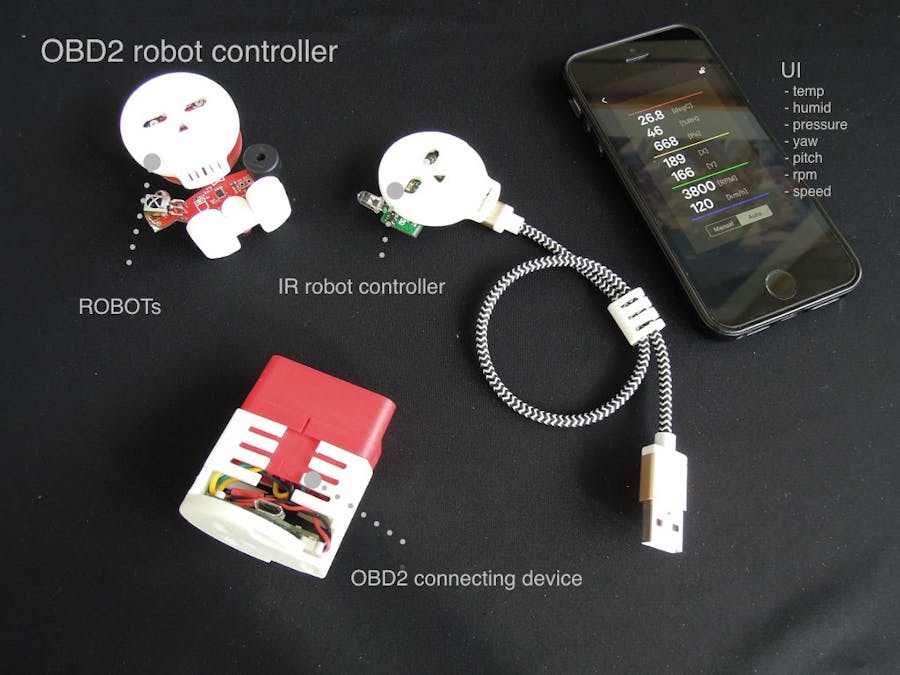
I tried to control the robot by linking the information of OBD2 of the car. The robot reacts according to the car parameter i.e. engine speed.
It consists of an OBD 2 connecting device, an IR robot controller and the robot SHAKEY and/or MOMONGA.
It consists of CAN protocol chip and BLE controller. It will detect the number of revolutions of the engine, the running speed of the car and displays it on the mobile device. At the same time, send the data to the IR robot controller.
IR robot controllerIt receives the data from the OBD2 connection board. Also temperature, humidity, atmospheric pressure and gyro data are displayed on the mobile device, as well. If the rotation speed becomes high, etc., it instructs the robot via IR.
Raspberry Pi Zero W connectionIR robot controller can be connected to Raspberry Pi Zero W via UART. The connection to Wifi, connection of camera, etc. can be extended.
PARTS LIST
Universal OBD II Connector Kit can be found at bmotorsports.
All 3D print data is on thingiverse.



Comments