


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
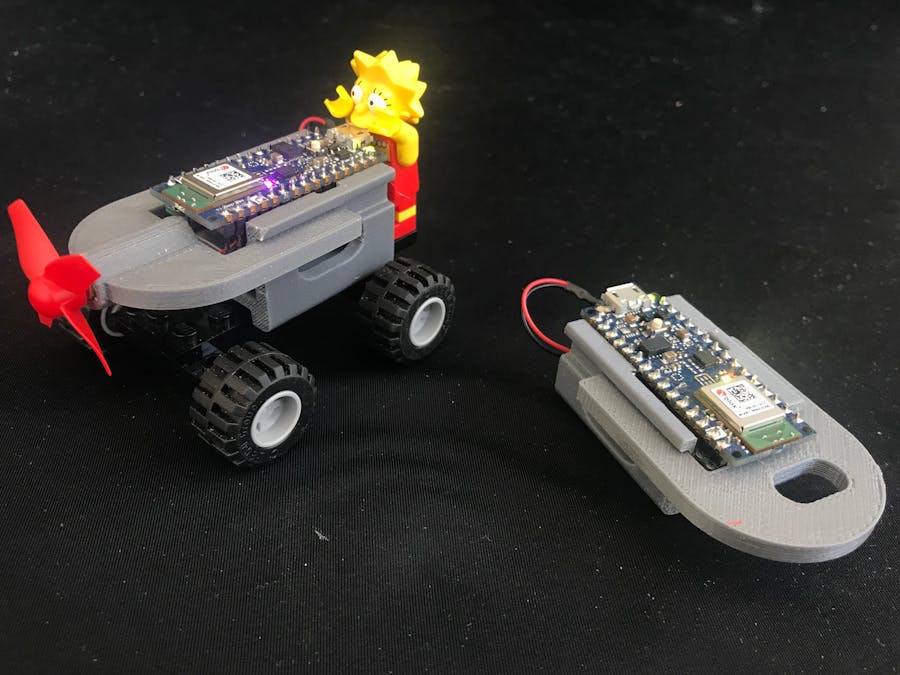
The Arduino Nano 33 has a Bluetooth wireless connection and an accelerometer, so you can enjoy it with minimal additional circuitry.
A remote control car was created by connecting a LiPo battery and a small DC motor.
I used an add-on card that was previously created for adjusting the supply voltage and the motor drive circuit.
The car body was combined with LEGO parts, but other parts were 3D-printed.
// ============================================
// Arduino nano 33
// propeller CAR Controller (central)
// ============================================
// PORT ASSIGNMENT
// ============================================
// D7:EX POWER
// A4:EX IO
// D13:LED
// ============================================
// FILE INCLUDE
// ============================================
#include <Arduino_LSM9DS1.h>
#include <ArduinoBLE.h>
// ============================================
// CONTROL VALUABLES
// ============================================
long itime, itime2; // event timer
int tgll;
int oldButtonState = LOW;
// ============================================
// SETUP
// ============================================
void setup() {
Serial.begin(9600);
//while (!Serial);
pinMode(13, OUTPUT); // on board LED
pinMode(22, OUTPUT); // RGB LED R
pinMode(23, OUTPUT); // RGB LED G
pinMode(24, OUTPUT); // RGB LED B
RGB(1,0,1); // Green
IMU.begin(); // begin gyro
Serial.print("Accelerometer sample rate = "); Serial.println(IMU.accelerationSampleRate());
BLE.begin(); Serial.println("BLE Central - LED"); // begin initialization
BLE.scanForUuid("19b10000-e8f2-537e-4f6c-d104768a1214"); // start scanning for peripherals
}
// ============================================
// LOOP
float x, y, z;
int ONOFF;
// ============================================
void RGB(int R, int G, int B) { digitalWrite(22, R); digitalWrite(23, G); digitalWrite(24, B); }
void loop() {
gyro();
BLEDevice peripheral = BLE.available();
if (peripheral) { // discovered a peripheral, print out address, local name, and advertised service
Serial.print("Found "); Serial.print(peripheral.address()); Serial.print(" '");
Serial.print(peripheral.localName()); Serial.print("' ");
Serial.println(peripheral.advertisedServiceUuid());
if (peripheral.localName() != "LED") { return; }
BLE.stopScan(); // stop scanning
controlLed(peripheral);
BLE.scanForUuid("19b10000-e8f2-537e-4f6c-d104768a1214"); // disconnect, start scanning again
}
}
void gyro() {
if (IMU.accelerationAvailable()) { IMU.readAcceleration(x, y, z); } //Serial.println(-100*x);
if(-100*x > 30) { ONOFF = 1; } else { ONOFF = 0; } digitalWrite(13, ONOFF);
}
void controlLed(BLEDevice peripheral) {
Serial.println("Connecting ..."); // connect to the peripheral
if (peripheral.connect()) { Serial.println("Connected"); } else { Serial.println("Fail"); return; }
Serial.println("Discovering attributes ..."); // discover peripheral attributes
if (peripheral.discoverAttributes()) { Serial.println("Attributes discovered");
} else { Serial.println("Fail"); peripheral.disconnect(); return; }
Serial.println("Discovering retrieve the LED characteristic ..."); // retrieve the LED characteristic
BLECharacteristic ledCharacteristic = peripheral.characteristic("19b10001-e8f2-537e-4f6c-d104768a1214");
if (!ledCharacteristic) { Serial.println("no LED char"); peripheral.disconnect(); return; }
else if (!ledCharacteristic.canWrite()) { Serial.println("no wLED char"); peripheral.disconnect(); return; }
RGB(0,0,1); // red selected! Red/Green
while (peripheral.connected()) { // while the peripheral is connected
gyro();
int buttonState = ONOFF; // read the button pin
if (oldButtonState != buttonState) { oldButtonState = buttonState; // status changed
if (buttonState) { ledCharacteristic.writeValue((byte)0x01); Serial.println("ON"); }
else { ledCharacteristic.writeValue((byte)0x00); Serial.println("OFF"); }
}
}
RGB(1,0,1); Serial.println("Peripheral disconnected"); // blue
}
// ============================================
// Arduino nano 33
// propeller CAR (peripheral)
// ============================================
// PORT ASSIGNMENT
// ============================================
// D7:EX POWER
// A4:EX IO
// D13:LED
// ============================================
// FILE INCLUDE
// ============================================
#include <ArduinoBLE.h>
BLEService ledService("19B10000-E8F2-537E-4F6C-D104768A1214"); // BLE LED Service
BLEByteCharacteristic switchCharacteristic("19B10001-E8F2-537E-4F6C-D104768A1214", BLERead | BLEWrite);
// ============================================
// CONTROL VALUABLES
// ============================================
long itime, itime2; // event timer
int tgll;
// ============================================
// SETUP
// ============================================
void setup() {
Serial.begin(9600);
//while (!Serial);
pinMode( 7, OUTPUT); // DC motor
pinMode(13, OUTPUT); // on board LED
digitalWrite(7, 0); // motor power off
pinMode(22, OUTPUT); // RGB LED R
pinMode(23, OUTPUT); // RGB LED G
pinMode(24, OUTPUT); // RGB LED B
RGB(1,1,0); // Blue
BLE.begin(); // begin initialization
BLE.setLocalName("LED"); // define local name
BLE.setAdvertisedService(ledService); // set advertised local name and service UUID:
ledService.addCharacteristic(switchCharacteristic); // add the characteristic to the service
BLE.addService(ledService); // add service
switchCharacteristic.writeValue(0); // set the initial value for the characeristic:
BLE.advertise(); Serial.println("BLE LED Peripheral");
}
// ============================================
// LOOP
// ============================================
void RGB(int R, int G, int B) { digitalWrite(22, R); digitalWrite(23, G); digitalWrite(24, B); }
void loop() {
BLEDevice central = BLE.central();
if (central) { // if a central is connected to peripheral:
RGB(0,1,0); Serial.print("Connected to central: "); // Red/Blue
Serial.println(central.address()); // print the central's MAC address:
while (central.connected()) { // while the central is still connected to peripheral:
if (switchCharacteristic.written()) {
if (switchCharacteristic.value()) { // any value other than 0
digitalWrite(13, 1); digitalWrite(7, 1); Serial.println("ON"); // will turn the ON
} else { // a 0 value
digitalWrite(13, 0); digitalWrite(7, 0); Serial.println("OFF"); // will turn the OFF
}
}
}
Serial.print(F("Disconnected from central: ")); // when the central disconnects, print it out:
RGB(1,1,0); Serial.println(central.address()); // disconected Blue
}
//if(millis() - itime > 200) { itime = millis(); digitalWrite(13, tgll); tgll = !tgll; }
}


Comments