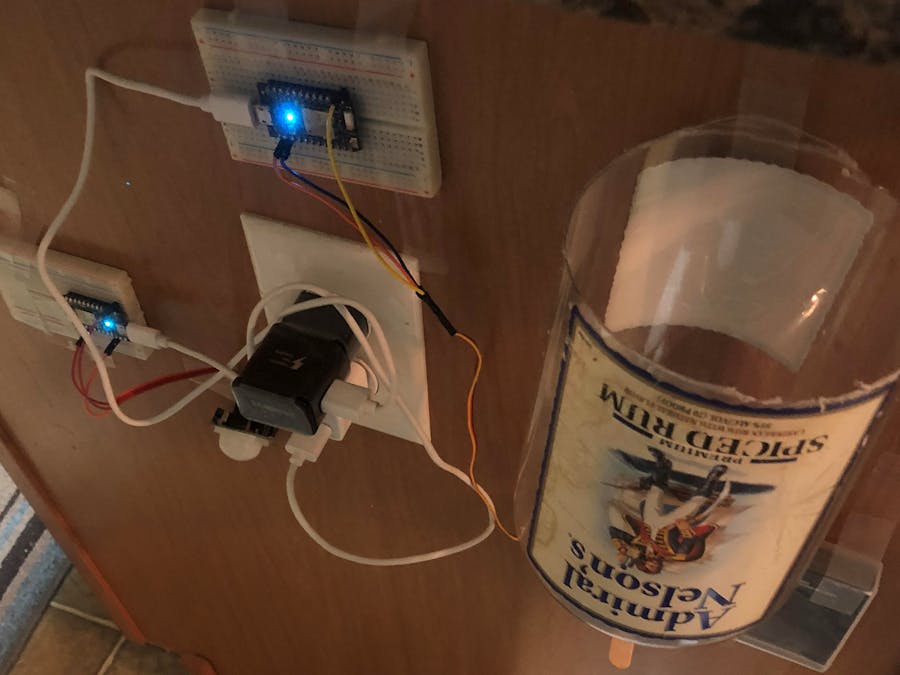
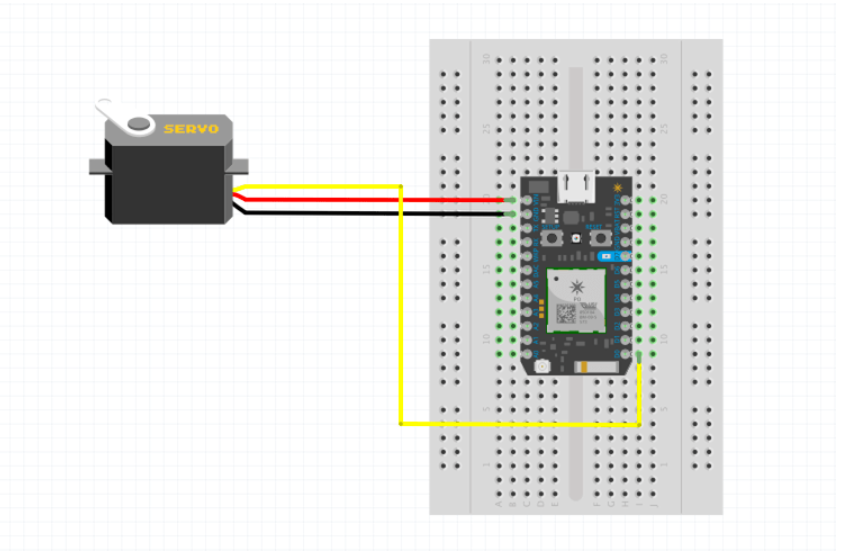
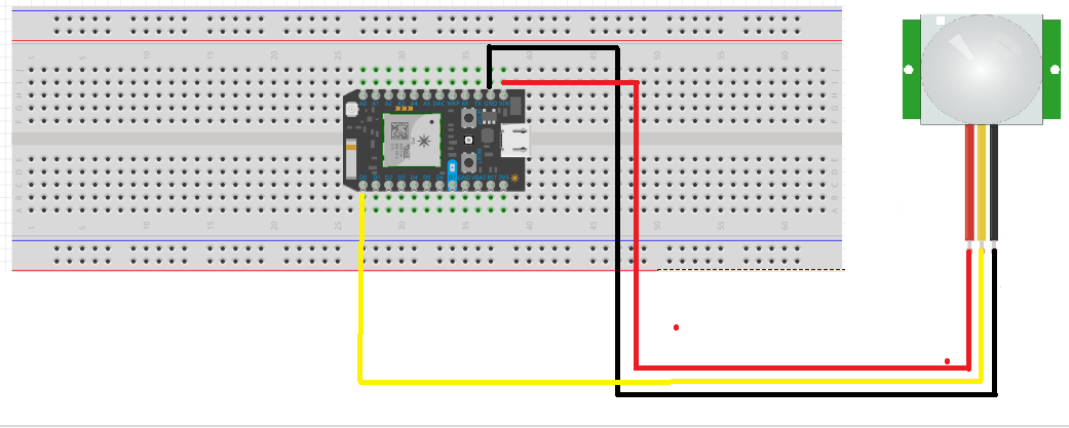
If you own a dog, or have ever thought about owning one, have you ever had the issue of finding someone to feed it while you’re away at work or on vacation? This is no longer a problem with our motion activated dog feeder. Our product uses the communication between two particle photons. The first photon uses a PIR sensor that sends a signal to the second photon after it senses the motion of your dog coming up to eat. The second photon then activated the servo motor which rotates 90 degrees opening the end of the funnel. The dog food then falls out of the funnel and into the bowl and then the servo rotates back to its original point to cover up the hole. The program of the servo can be easily updated so that less or more food is dispensed.


















{kind=link}
{kind=link}
Comments