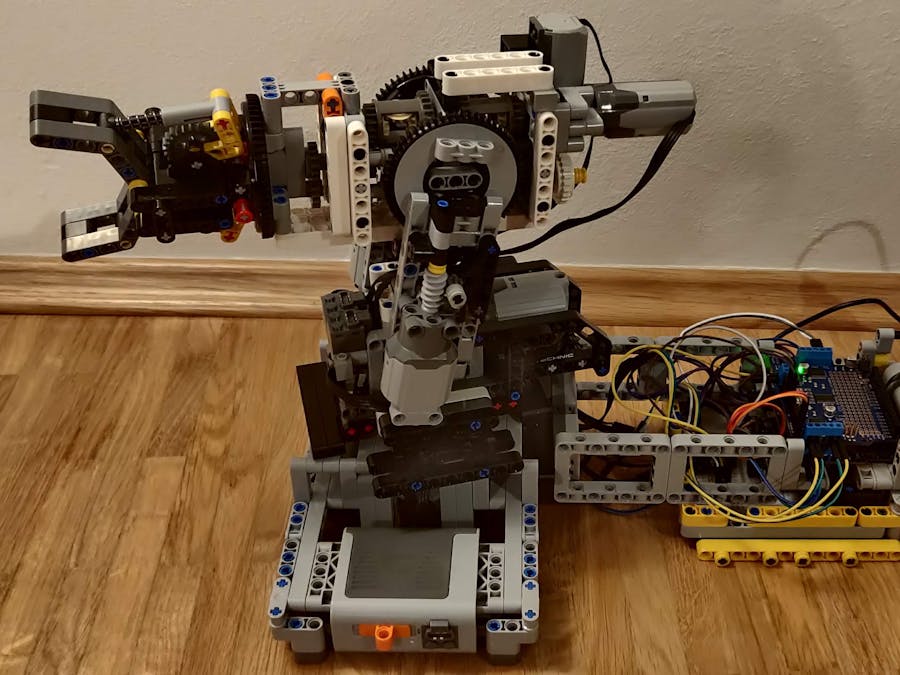
BackgroundI'm a long time LEGO builder but I had never built something of my own. Lately I've been experimenting with Pis and Arduinos and thought to build something entirely out of LEGO TECHNICS as I don't have MINDSTORMS sets but I do have A LOT of Technics pieces :). I went for a simple and small robotic arm yet with 5 degrees of freedom.
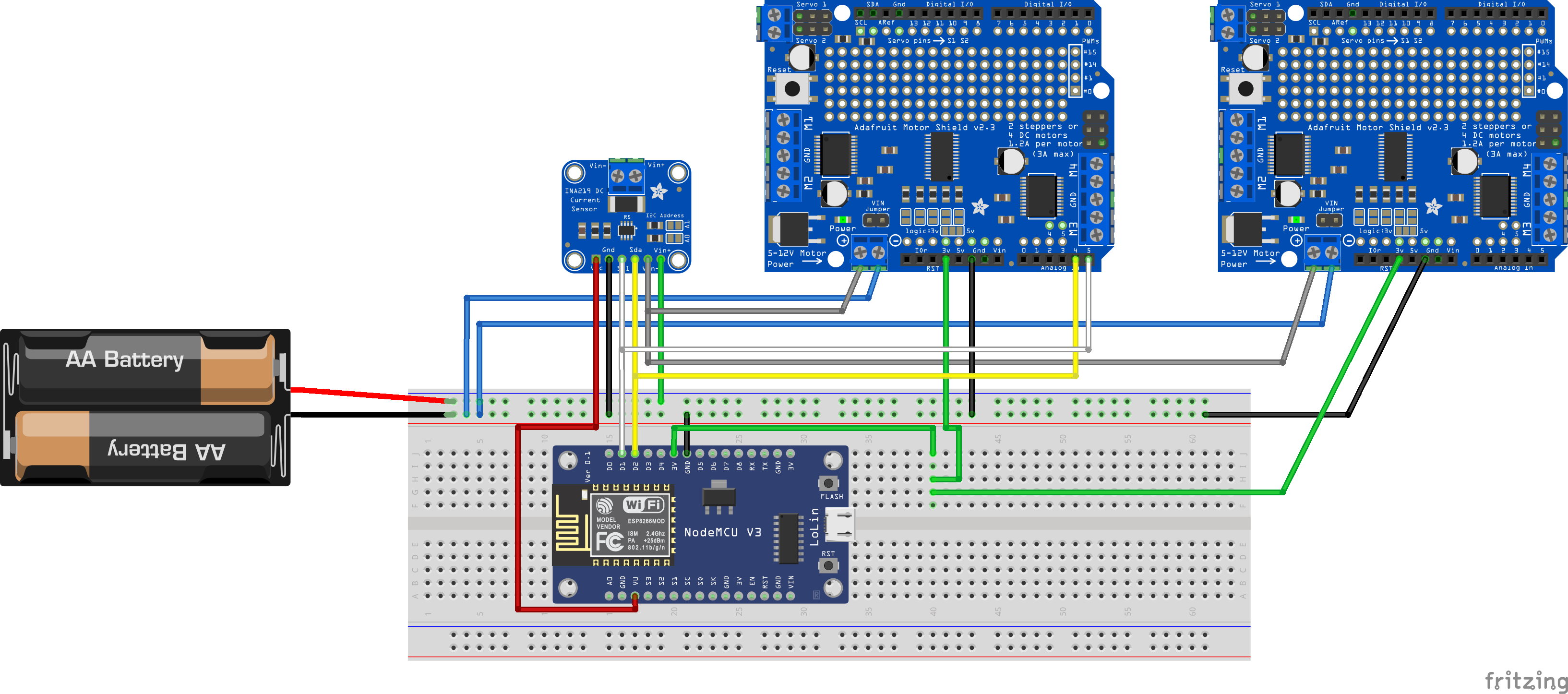
I used LEGO extension cables to avoid stripping off the cables of the LEGO motors. At the heart of the system lies a Node MCU with WiFi capability since I wanted to control the robot remotely with MQTT commands. The LEGO motors are driven by 2 Adafruit DC Motor shields (each one supports up to 4 motors). I've also included an Adafruit DC Current sensor to measure the power consumption of the motors for further development of the project.
A few pics:
1 / 8 • The arm with the yellow cover for the electronics
And a short video with the arm in action:




{kind=link}

Comments