This work was inspired by the effects of climate change taking place on our planet and affecting agriculture. It is immediately applicable to the optimization of agricultural production in greenhouses and contributes to slowing down the phenomenon of climate change through water and energy savings.
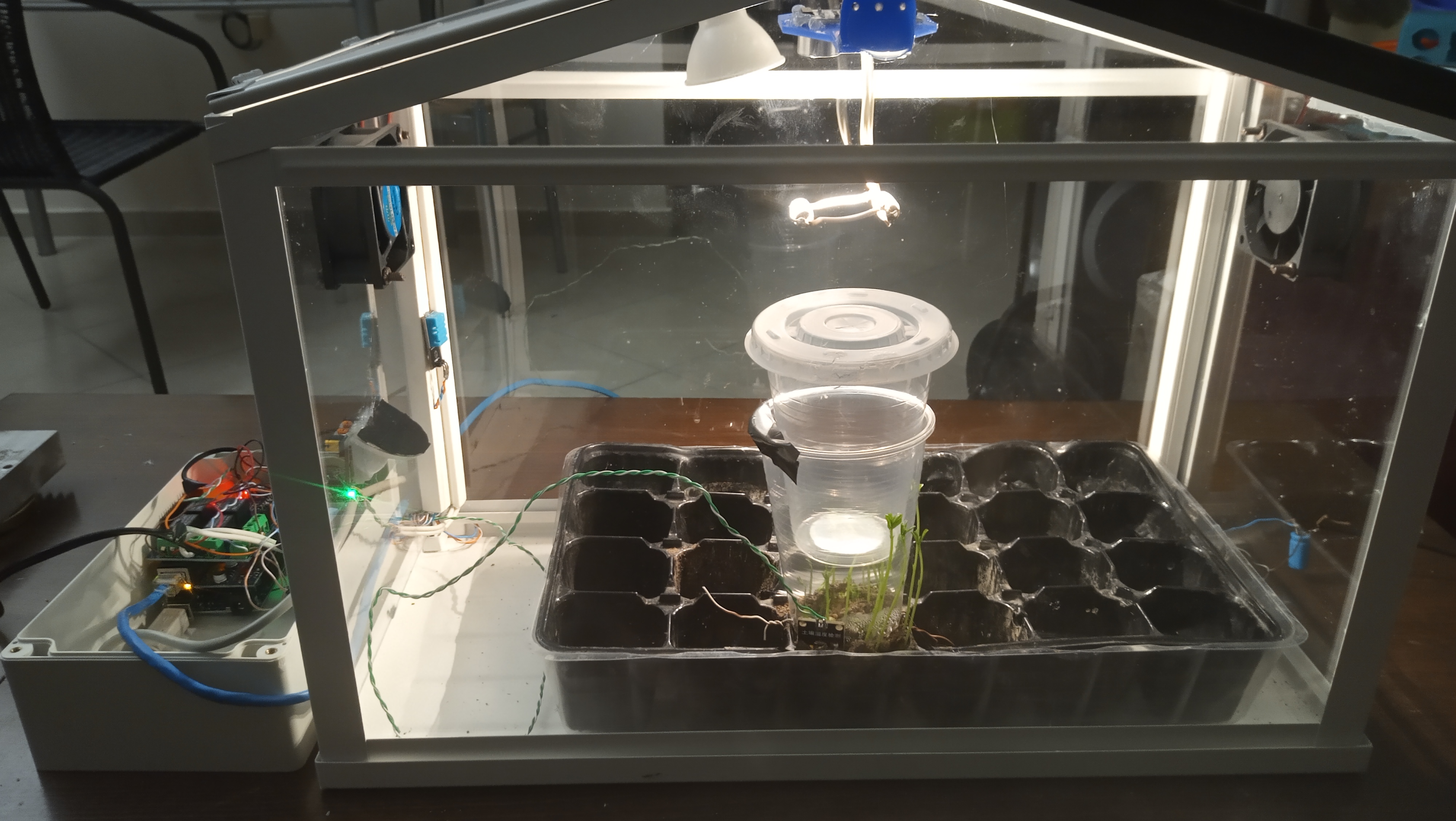
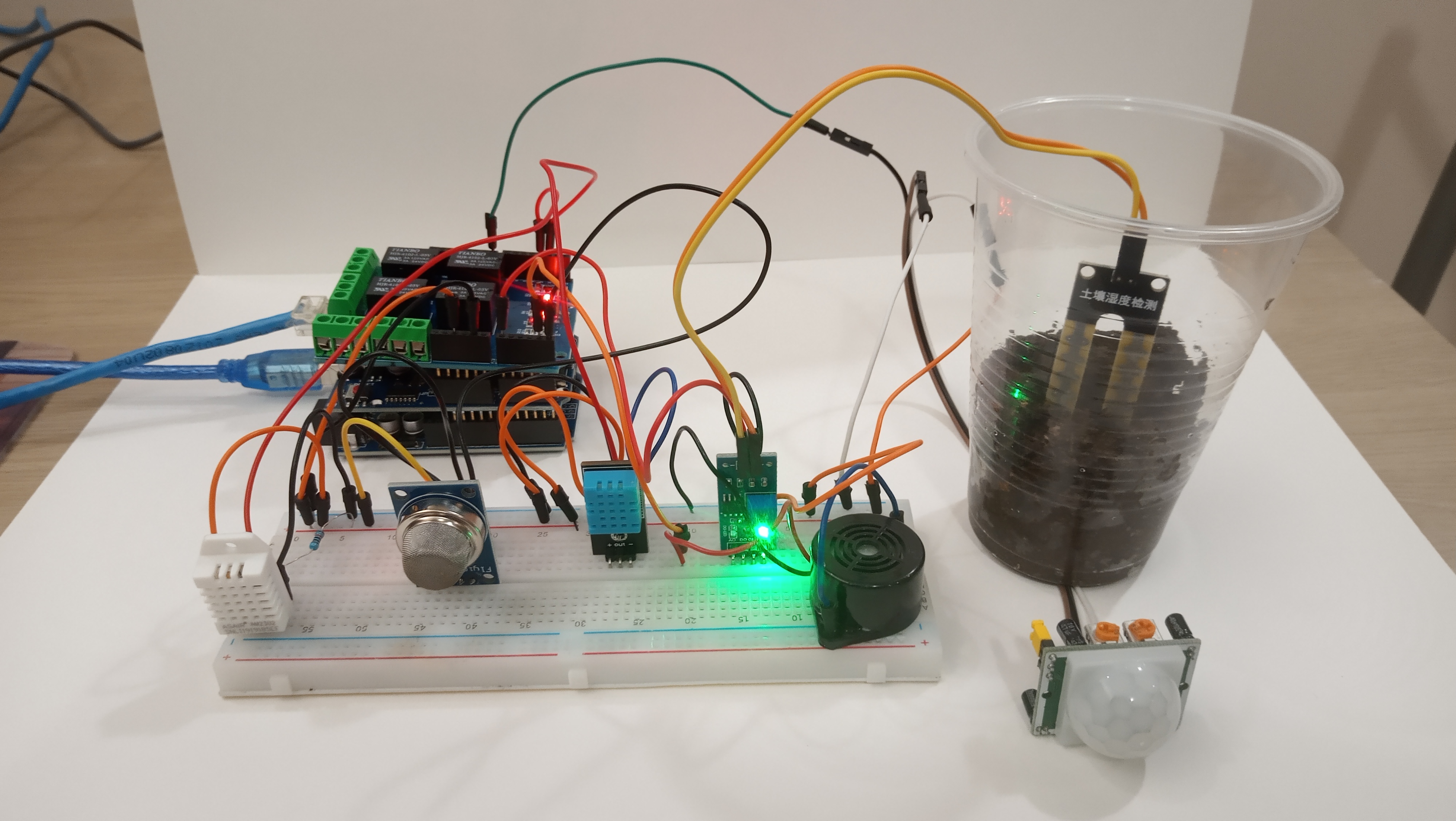
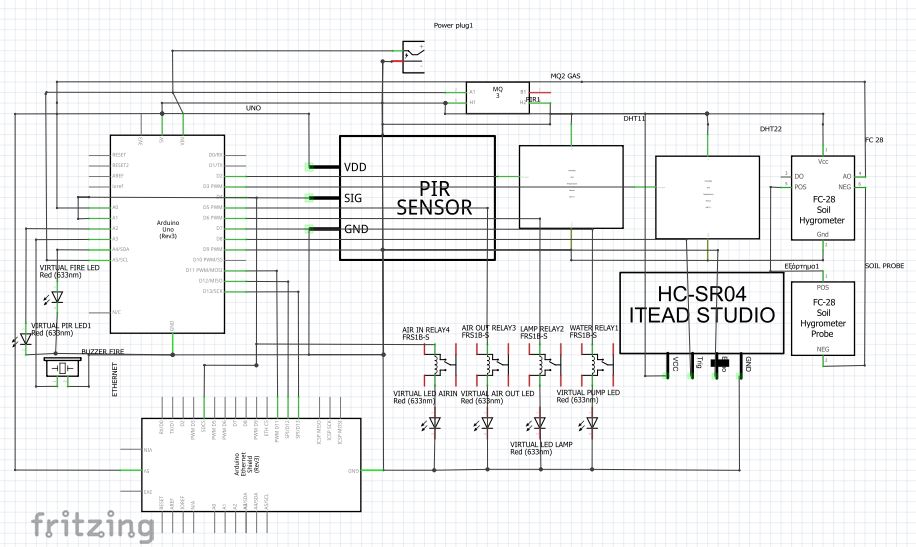
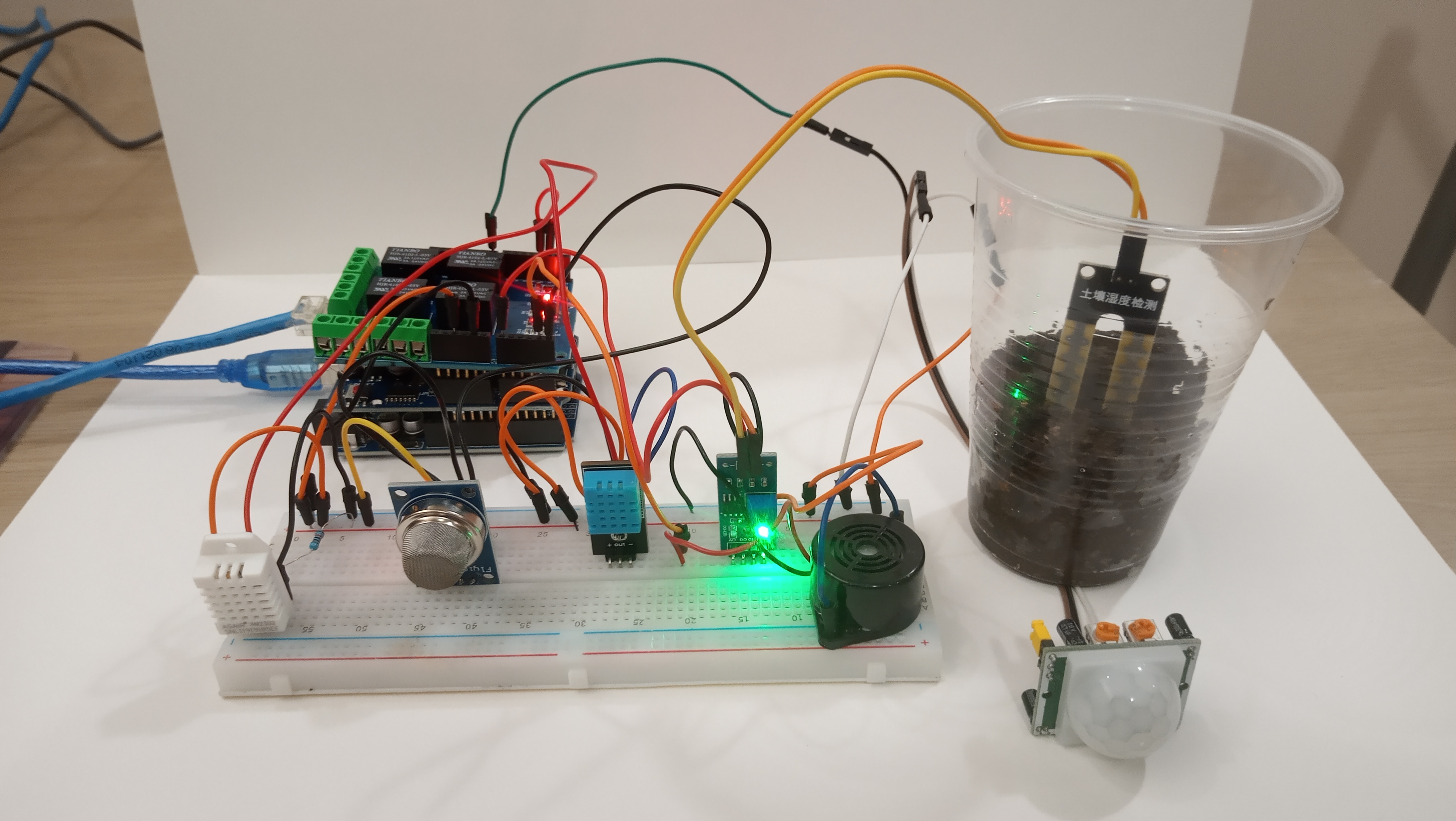
For this purpose, a complete functional unit for monitoring and controlling the internal environmental conditions of a greenhouse was implemented using a microcontroller (Arduino) and the development of the appropriate software.
Also with internet connection we can remote monitor and control with an android or iOS device (a common smartphone or PC), using the application created for this purpose.
Although it did not exist at initial objectives of the work, at the process, export of automated crop yield measurements was achieved. But the most important addition would be the use of machine learning so that the unit can continuously improve the settings of the environmental conditions, therefore without external intervention to apply the ideal conditions for each type of crop and soil.
The total construction cost of the unit is very low, in our case a few tens of euros.
Features:
i. Water saving through controlled irrigation based on the existing soil moisture and the definition of the desired value.
ii. Energy saving through controlled heating and cooling in combination with external conditions.
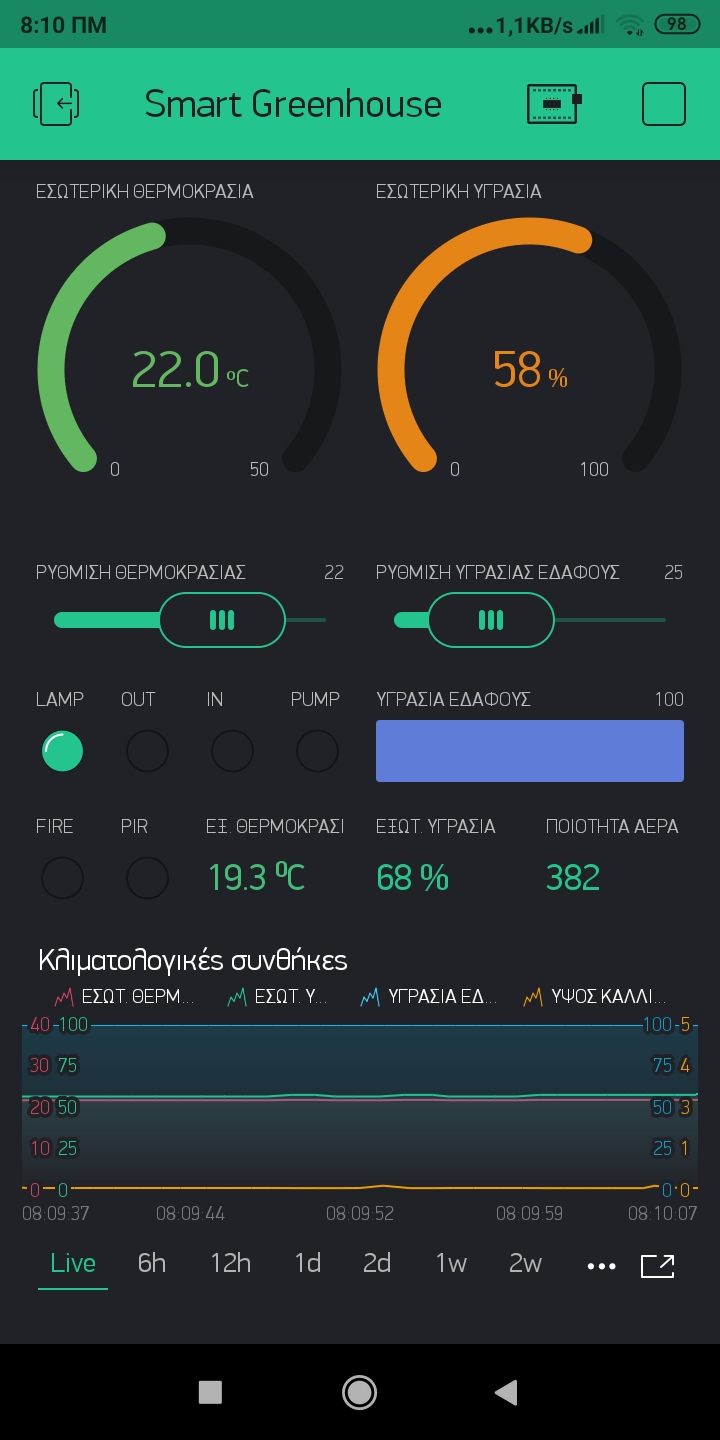
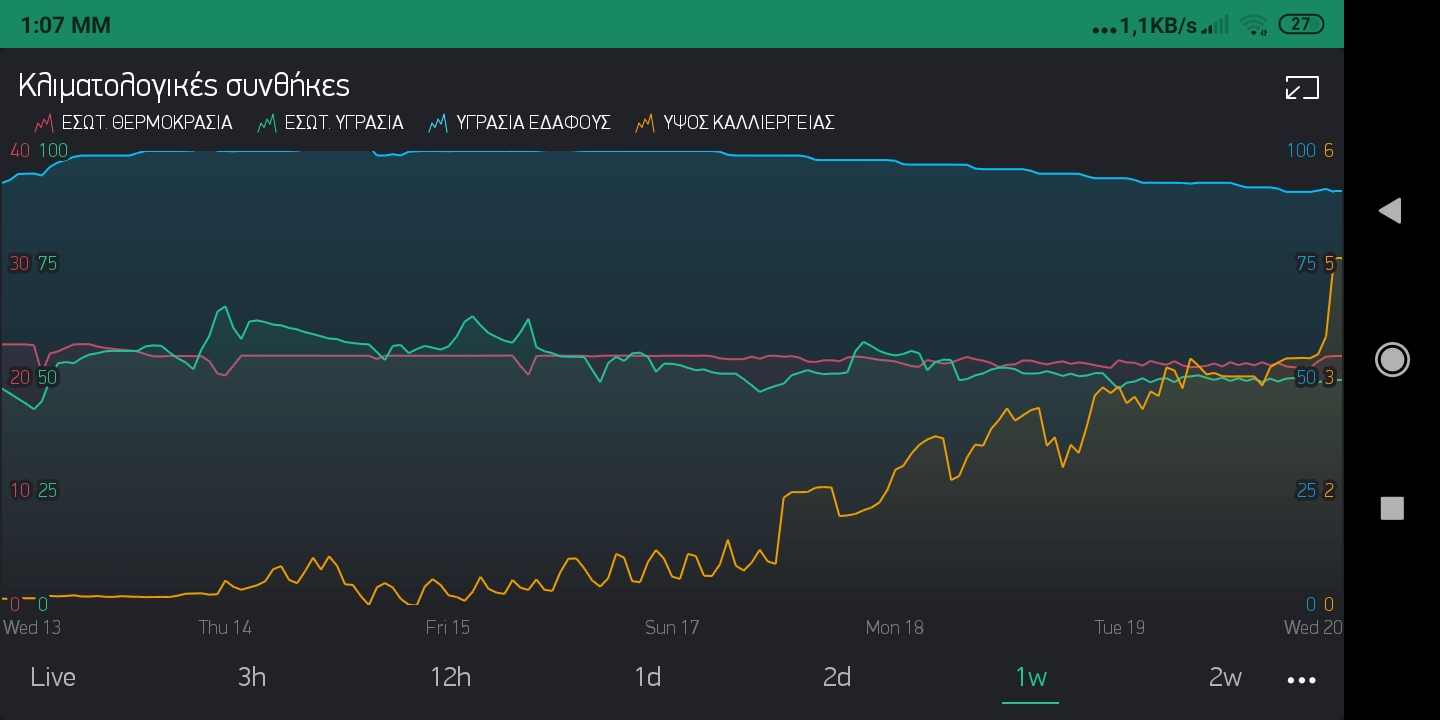
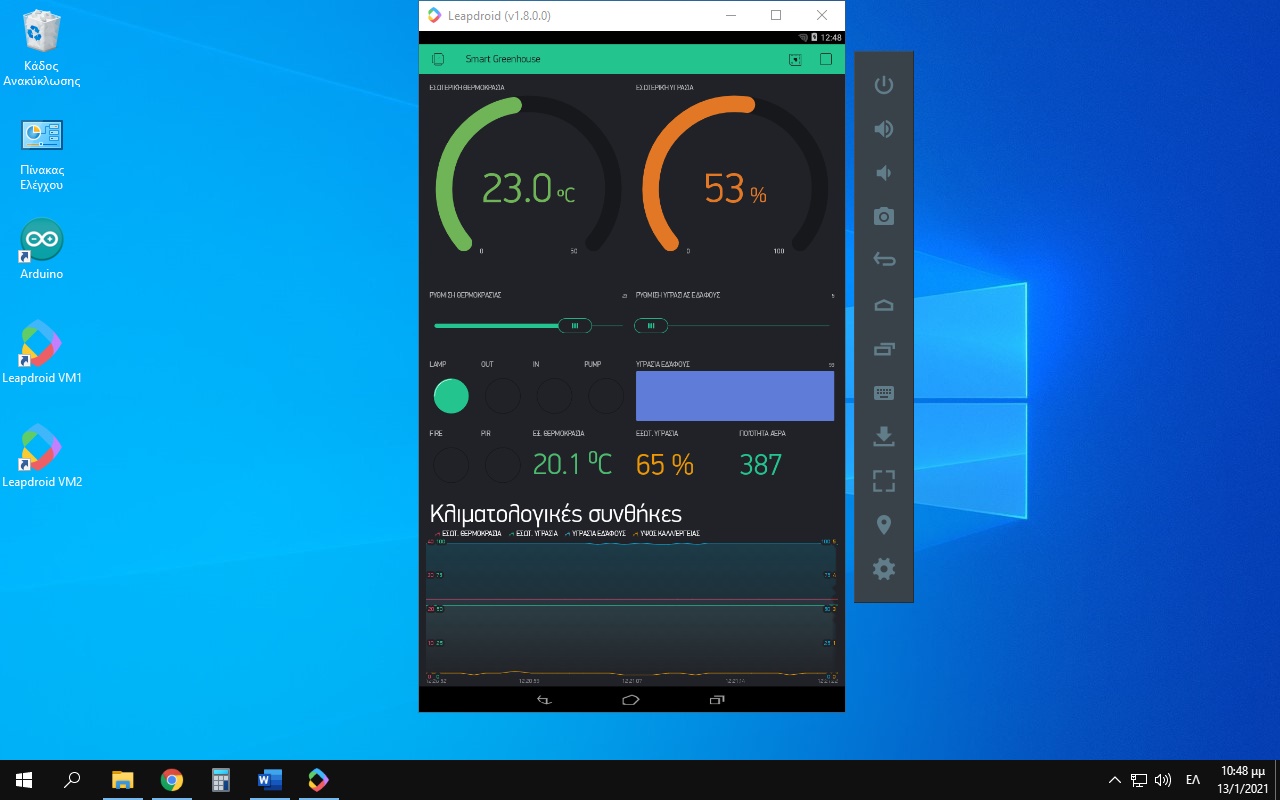
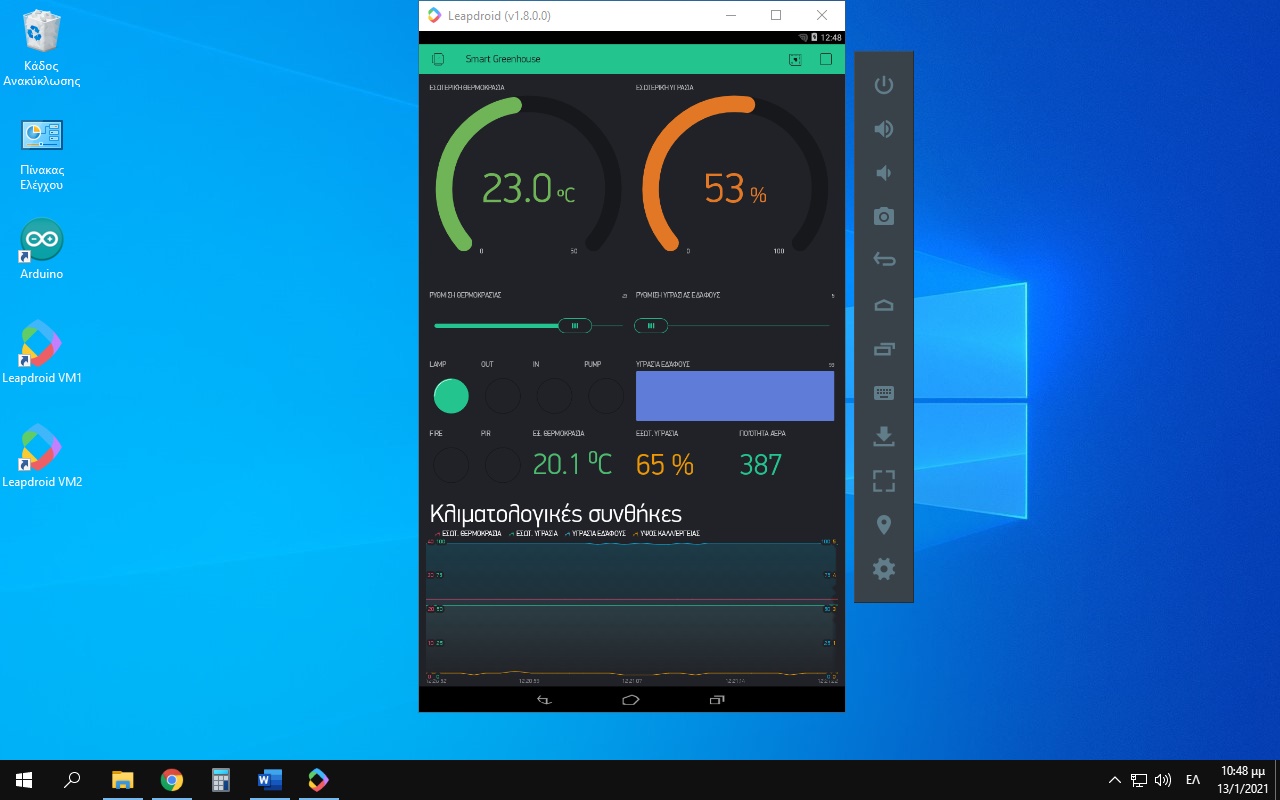
iii. Monitoring and display of internal (temperature - humidity, soil humidity) and external environmental conditions (temperature - humidity) in real time and on a graph for a period of time.
iv. Control of internal conditions (greenhouse), with selection by the user of the desired value of temperature (heating) and soil moisture (automatic irrigation).
v. Monitoring and controlling system processes in real time, at any location, using a mobile phone or computer application.
vi. Fire detection - fire extinguishing.
vii. Motion detection in space (damage from animals).
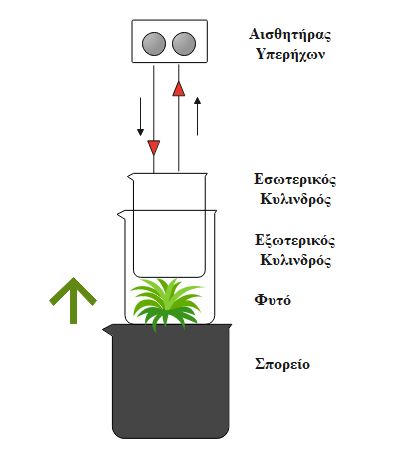
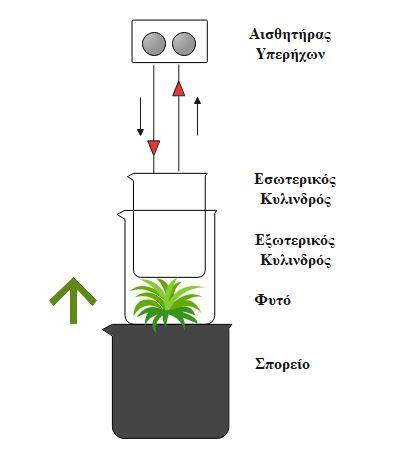
viii. Measurement of production growth.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments