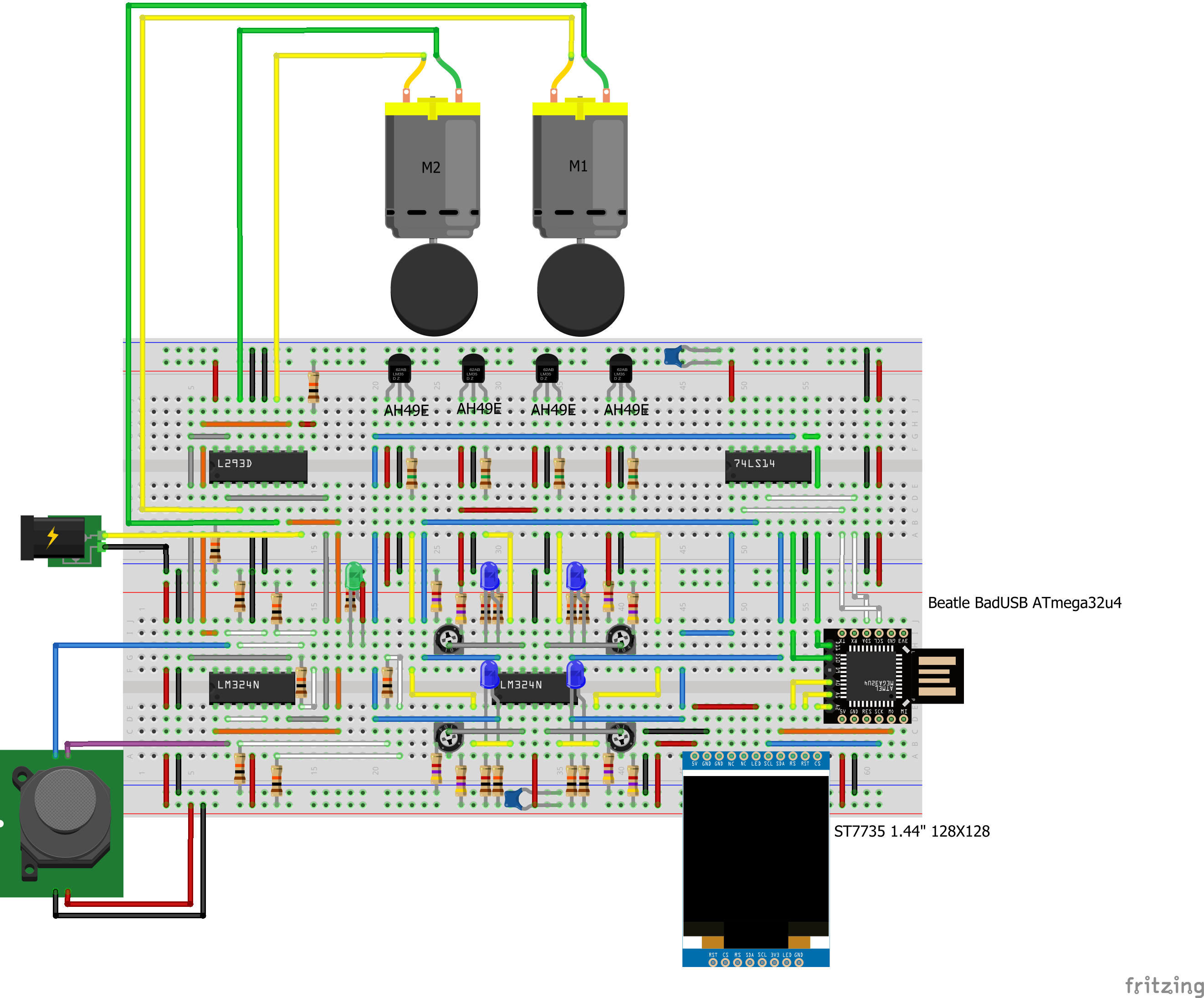
This project consists of using Hall effect sensors to determine the turning direction and RPMs of a DC motor. In this case 2 motors at the same time.
With the use of external interruptions, the state of the sensors 1 of each pair is determined, and with this the state of the sensors 2 placed at four (90 degrees) is registered and by means of the code determine if the direction of rotation of each motor. In addition to internal interruptions (Timer1), the period time is calculated to determine the frequency (Turns per second) and the RPM of each motor.
On each motor shaft, I have improvised an encoder with neodymium magnets.
To control the direction of rotation of each motor, I use op amps (LM324N) with a joystick and a driver (L293N and L298N).
To digitize the analog signal from each sensor I use op amps as comparators.
Last but not least, I have used a Schmitt Trigger Inverter (SN74LS14N) to nullify the transient effect of each sensor, thus avoiding false readings and thus obtaining with sufficient precision the revolutions and direction of rotation of each motor.
I use the ATmega32u4 (Beatle BadUSB) microcontroller as Arduino Leonardo, however the code is usable on most types of arduino.
The display is a ST7735 of 128x128 pixels with SPI bus, easy to use.
In the following video you can see the operation and testing of the code:
/*
RPM Meter Direction
Use Square Encoder with Hall effect sensors
By DrakerDG (c)
https://www.youtube.com/user/DrakerDG
*/
#include <SPI.h>
#include <TFT_ST7735.h>
#include <SimplyAtomic.h>
#include <TimerOne.h>
#define GREEN 0x07E0
#define YELLOW 0x07FF
#define DC A0 //9
#define RS A1 //10
#define CS A2 //11
// Sensor pins
const byte PinX[4] = {2, 3, 10, 11};
// Limit of microseconds
const long uSeg = 100000;
// Left position RPM labels
const byte x1 = 75;
// Pulse timer counters
volatile unsigned long pwc[2];
// PWM periods
volatile unsigned long pwm[2];
// RPM values
unsigned long rpm[2];
// States of the second sensors
volatile bool Sen[2];
// Count variable printing millis
unsigned long prT = 0;
TFT_ST7735 tft = TFT_ST7735(CS, DC, RS);
void CountSA(void);
void CountSB(void);
void RPMc(void);
void Draw_Table(void);
void Print_Data(void);
void setup(){
Serial.begin(9600);
tft.begin();
tft.setRotation(1);
tft.clearScreen();
tft.setTextWrap(true);
tft.setTextColor(YELLOW, BLACK);
tft.setCursor(0, 0);
Draw_Table();
for (byte i=0; i<4; i++){
pinMode(PinX[i], INPUT);
}
for (byte i=0; i<2; i++){
pwc[i] = uSeg;
pwm[i] = uSeg;
rpm[i] = 0;
}
// Interrupt to count period time
Timer1.initialize(100);
Timer1.attachInterrupt(RPMc);
// Interrupt of Sensor 1 of Motor A
attachInterrupt(digitalPinToInterrupt(PinX[0]), CountSA, FALLING);
// Interrupt of Sensor 1 of Motor B
attachInterrupt(digitalPinToInterrupt(PinX[1]), CountSB, FALLING);
}
void loop(){
Print_Data();
}
void CountSA(){
// 2nd sensor value
Sen[0] = 1 & (PINB >> 7);
pwm[0] = pwc[0]; // Save the period
pwc[0] = 0; // Reset the timer
}
void CountSB(){
// 2nd sensor value
Sen[1] = 1 & (PINB >> 6);
pwm[1] = pwc[1]; // Save the period
pwc[1] = 0; // Reset the timer
}
void RPMc(){
for (byte i=0; i<2; i++){
// Increase the time counter
pwc[i]++;
if (pwc[i] > (uSeg)){
// Limit the timer & period
pwc[i] = uSeg;
pwm[i] = uSeg;
}
}
}
void Draw_Table(){
// Code to draw the table on screen
tft.drawFastVLine(22, 0, 128, WHITE);
for ( int i=0; i<11; i+=1 ){
tft.drawFastHLine( 20, 5+i*12, 4, WHITE);
if (!(i&1)){
tft.setCursor( 0, i*12 + 2);
tft.print((10.0-i)*0.5, 1);
}
}
tft.drawFastHLine( 20, 125, 128, WHITE);
tft.setTextSize(1);
tft.setCursor(x1, 10);
tft.print("Motor A");
tft.setCursor(x1+30, 45);
tft.print("RPM");
tft.setCursor(x1, 70);
tft.print("Motor B");
tft.setCursor(x1+30, 105);
tft.print("RPM");
tft.setTextSize(2);
}
void Print_Data(){
unsigned long nwT = millis();
// Calculations and prints every 10ms
if ((nwT - prT) > 10){
prT = nwT;
char sRPM[10];
for (byte i=0; i<2; i++){
//RPM
tft.setCursor(x1, 25+60*i);
// Protects math calculation
ATOMIC()
{
// Detect Rotation Decrease
if (pwc[i]>(pwm[i]*2)){
pwm[i] *= 2;
pwm[i] = constrain(pwm[i], 0, uSeg);
pwc[i] = pwc[i]*2;
}
/* detects or not the
rotation of the motors */
if (pwm[i] < uSeg) rpm[i] = 6*uSeg/pwm[i]; // Detects rotation
else if ((rpm[i] > 0)&&(pwm[i] == uSeg)) rpm[i] = int(rpm[i]/2); // No rotatiom
// Limits the value of RPMs
rpm[i] = constrain(rpm[i], 0, 9999);
}
dtostrf(rpm[i], 4, 0, sRPM);
// Print the RPMs
tft.print(sRPM);
int valX = rpm[i]*120/500;
// Prints the RPM bars
tft.fillRect(30+15*i, 0, 10, 125 - valX, BLACK);
tft.fillRect(30+15*i, 125 - valX, 10, valX, GREEN);
tft.setCursor(x1-15, 25+60*i);
/* Determines the direction
of rotation of the motors.
Prints + if it turns CW and
- if it turns CCW */
if ((rpm[i] == 0)&&(pwm[i] == uSeg)) tft.print(" ");
else if (Sen[i]) tft.print("-");
else tft.print("+");
}
}
}
Two Hall effect sensors placed in quadrature
Quadruple operational amplifier (LM324N) to digitalize the analog signal of each sensor
Quadruple operational amplifier (LM324N) to control the movement of the motors
Driever to control the two motors (L293N)
Direction of rotation indicator (+/-) and RPM of the two DC motors








{kind=link}
Comments