


Hardware components | ||||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
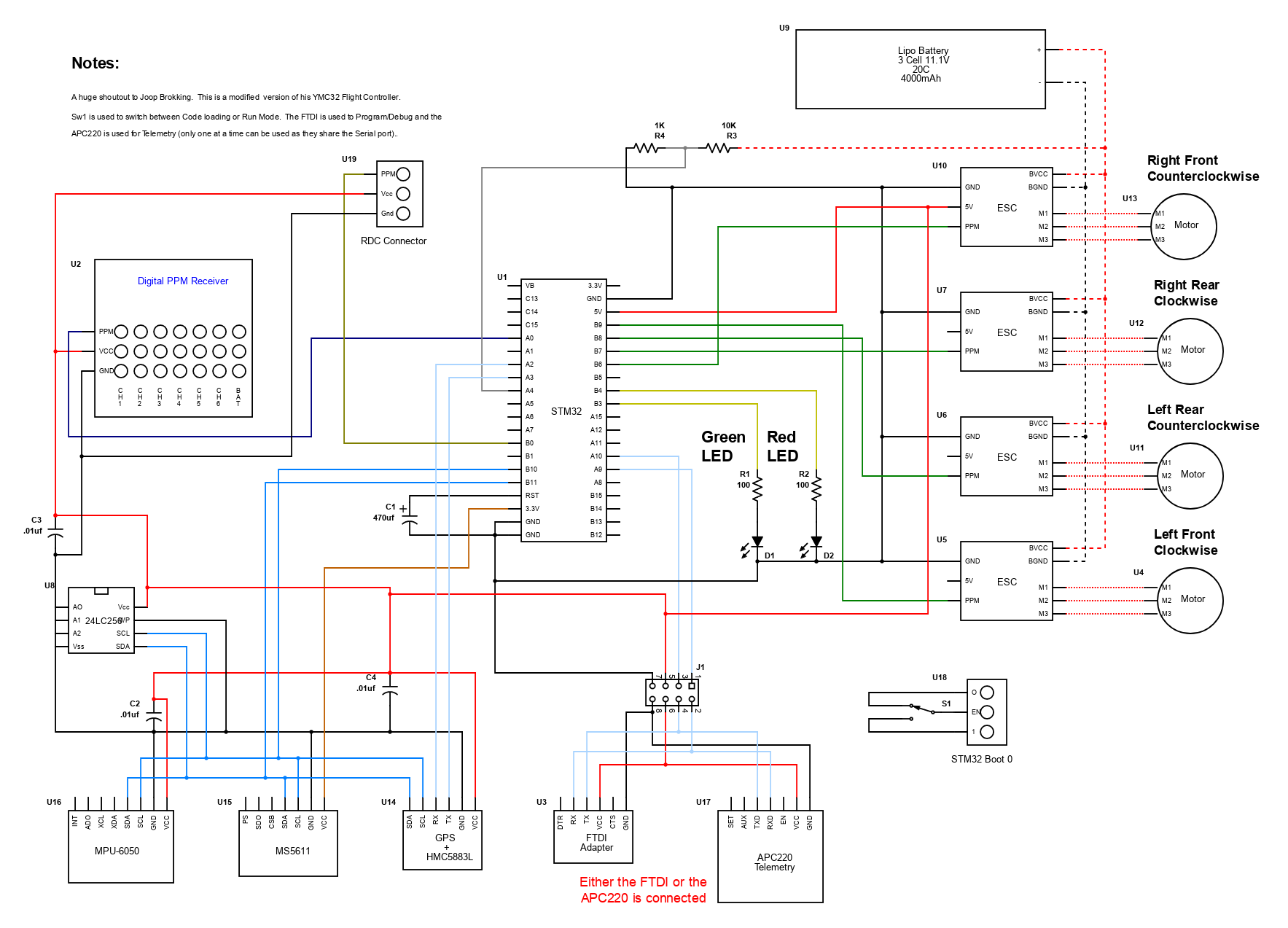
Modified Version of Joop Brokking's YMFC32 Autonomous Quadcopter. Huge thank you to Joop Brokking for his hard work, great videos (seriously great videos) and ongoing inspiration. YouTube video with Demo.
I enhance the telemetry system to use two-way communications via the serial port. The new telemetry interface allows me to change the PID tuning parameters with user supplied floating point values, change system variables and send debug data etc. The telemetry receiver was moved from and Arduino UNO to an MRK1010. The MRK1010 allows me to have a WiFi interface, so I can use a Laptop or Iphone while interacting with the YMFC32. The webpage.html is javascript and is compressed and base64 encoded to save space on the MKR1010. I create a YouTube video (I'm no Joop that's for sure, but it gets the job done) a while back to show you how to create the file for the Arduino. The Link is: T002 Laser Tank Base64 Web Page Fast forward to around 1 minute and 18 seconds, one of my first videos you can thank me later for skipping.
I added an 24LC256 IC2 EEPROM to save the calibration parameters (I don't have to reload them every time I change the code), debug data, waypoints, modified PID parameters, etc.
Added the RDC (Remote Drop Command) feature. This option allows me to control an external servo, when triggered via the RDC Button, the YMFC32-C will open its storage door and release its payload. For summer the payload is several parachute guys for the grandchildren and 4th of July it's ground snaps!
I also made a few minor hardware changes:
- I added some noise reduction capacitors and delayed boot capacitor, the boot capacitor ensures all IC2 devices are booted before the STM32 starts to run.
- I added a switch, so I change the boot mode without having to move the jumper, my fingers are too big!
///////////////////////////////////////////////////////////////////////////////////////
//Terms of use
///////////////////////////////////////////////////////////////////////////////////////
//THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
//IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
//FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
//AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
//LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
//OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
//THE SOFTWARE.
///////////////////////////////////////////////////////////////////////////////////////
#include <global.h>
#include <base64.h>
#include <WebSocketClient.h>
#include <WebSocketServer.h>
#define _WIFININA_LOGLEVEL_ 1
#include <WiFiNINA_Generic.h>
#include "network_parameters.h"
// global var
char ssid[] = SECRET_SSID;
char pass[] = SECRET_PASS;
const byte IPLastByte = 99;
const short webPort = 80;
const short socketPort = 8080;
// WiFi
WiFiServer webServer(webPort);
WiFiServer socketServer(socketPort);
WebSocketServer webSocketServer;
WiFiClient socketClient;
// Console Attached
#ifndef TerminalAttached
// true = terminal attached (send serial messages), false = no terminal attached no messages
#define TerminalAttached false
#endif
// Buffer Constant Both sides must Match
#ifndef Receive_Buffer_Size 55
// Receiver Buffer Size
#define Receive_Buffer_Size 55
#endif
// Buffer Constant Both sides must Match
#ifndef Send_Buffer_Size
// Send Buffer Size
#define Send_Buffer_Size 6
#endif
// telemetry
uint8_t telemetry_lost;
uint8_t check_byte, temp_byte;
//from YMC-32
uint8_t rec_telemetry_last_byte = Receive_Buffer_Size; //this is the last byte of the receivers telemetry buffer they have to match the YMC-32's TX
uint8_t receive_buffer[Receive_Buffer_Size + 1], receive_buffer_counter, receive_byte_previous, receive_byte, receive_state; // rec_telemetry_last_byte + 1
//to YMC-32
uint8_t send_telemetry_last_byte = Send_Buffer_Size; //this is the last byte of the transmitters telemetry buffer they have to match the YMC-32's RX
uint8_t telemetry_send_byte, telemetry_loop_counter, ready_to_send;
uint32_t telemetry_buffer_byte;
// YMC-32 commands
uint8_t ymc32_command;
float ymc32_fval;
uint8_t error, alarm_sound, flight_mode;
uint8_t alarm_silence;
uint8_t start_byte, flight_timer_start;
uint8_t hours,minutes,seconds;
uint8_t heading_lock;
uint8_t number_used_sats;
uint8_t fix_type;
uint8_t debug_byte;
int8_t page, previous_page;
uint32_t current_receive, current_receive_min, current_receive_max, last_receive, next_sound, flight_timer, flight_timer_previous, flight_timer_from_start, flight_time_from_eeprom;
uint32_t hours_flight_time, minutes_flight_time, seconds_flight_time;
int32_t loop_timer, loop_timer_min, loop_timer_max, l_lat_gps, l_lon_gps;
int16_t temperature,temperature_min,temperature_max, button_push, button_store,roll_angle,roll_angle_min,roll_angle_max, pitch_angle, pitch_angle_min, pitch_angle_max;
int16_t altitude_meters, altitude_meters_min, altitude_meters_max;
uint16_t key_press_timer;
int16_t manual_takeoff, takeoff_throttle;
uint16_t actual_compass_heading;
float battery_voltage,battery_voltage_min,battery_voltage_max;
float pid_p_gain_roll; //Gain setting for the pitch and roll P-controller
float pid_i_gain_roll; //Gain setting for the pitch and roll I-controller
float pid_d_gain_roll; //Gain setting for the pitch and roll D-controller
float pid_p_gain_yaw; //Gain setting for the pitch P-controller (default = 4.0).
float pid_i_gain_yaw; //Gain setting for the pitch I-controller (default = 0.02).
float pid_d_gain_yaw; //Gain setting for the pitch D-controller (default = 0.0).
float pid_p_gain_altitude; //Gain setting for the altitude P-controller (default = 1.4).
float pid_i_gain_altitude; //Gain setting for the altitude I-controller (default = 0.2).
float pid_d_gain_altitude; //Gain setting for the altitude D-controller (default = 0.75).
byte led;
// Background
boolean Backgroundinit = true;
// Return to Home
uint8_t return_to_home_command;
// YMC32 webpage, gzipped and base64 encoding to save space
char webpage_base64[] = "H4sICJBMc2IEAHdlYnBhZ2UuaHRtbADtXXlzwkQU/98ZvwPijNZBTbhBbWdyAYFwJCFc6nRCLkJOchCC43d3EwL0pJTQ6qiZKS2b3be/99u359vd/vIV3seG0wGRWXiGfvflF79EvzM6byq3WcnMgpAMeH5ZSLyY/B1/91RPl+6m3Qb2Q7GQGUq6ZEieE2ZI05McmRekX6A4ysM0IAafERa840rebdb35B9q2YfvddXUMo6k32bdheV4gu9lVMEys5mFI8m32a8fRXa9MJF+fOaWGGb+OIQdw3lBUxzLN8UfBEu3nJ8yXxNlotxo/Pw47p+Pv9ovyZIt0/tB5g1VD3/KII7K699nXN50f3AlR5VPCxTV9Y+yrioLz/V4z3dfkm9bruqplvlThp+7lu570s/PI3mW/VMmX7Y3L7zTJdkDL2F78zYYxXZVU7bS4SjmC6mB2KpoO5aup0NykpFi6Vwkanok5eJVkIjpkdThqyCxQz5IB+Rk4ZRKpTOBqKmBlItXASKmBlKHrwLE5nUvHZCTRVMu1c4EoqYGUi5eBYiYGkgdvgoQAXQWjpWyBueLlfRV2Afd01XQFOErNCiBKqsf3gVWKmfVIDd0Pcm4Chr4anBAUcmq8s+AE40Q5r7nWWY6PIX6FfB4vCZZsnwNPMViNT0el19LoKJfBU8NTo9nLkn2NcCUClcA44jCx2OpFcpnYfEW18ACjCYdlh8P1gLM+MXJiuWIEpiiAByq+PNr7/cTmbkO5jY/nzPlQXX/Ja2St8FCfVFpmxdF1VR+ygDFop8XogSq6C2i5uZQSs8nTK66lUCUlycKgu+4EQbbUqPZ40vUSxvvBx7MnEAJCVIU6WySzfQcx9ycxXHTkSTzP0OyYBkGb8ZEX0jzMwL7Dlh4eImi0+Z+ZBAoD35OMFh7m0D4swj0LEXRpaSLvYjAf2pbUH6b5U8z0x3L0cDh39bi/pNYTgZCn0wxI4n/OYYva2ovJPg/ZcPR4PnfOTb7J7HsSqYIZgafye/XUr1SLwj/LYq9xWdS/PFD338Iwb9Ae9fT7tsDz9gvkQPqoZMKTDwzgs677m32od9n78g6etP4uS5lYrm32RfMV46fn/eFB9TclUxSint5j2U6SejzN2JUKq7Nm7fZcjYT6Q3+2umd3aNIsso/ySopjWK0tgTy/WV+14gVy7CxZr9A8zvg+RNfyBoEO+/EuYhkLV5//QT6HeY7DvjzfYm6qvnOBPzmfQk4U/XcKMl1WBHvCMexnAxmmWK8ahETDsKflqQq3mYJ5v4QL3sHX69sxDtQ4s6u3KVTCOJo93G0KwMYJkP64cKxPE8/iSKJe5/EvTaUpBJ0LfEkil20exDt2gAYyfMdMzO0Mi3LOIlhF/N+aN2DmNeG0ZL4qDnPUJagnQKRxLuP4l0Xwj63aEEue8dE/lPEVHbG8XaqhxijtPdxWoAwTfJ70MSkFsFvzhbhACMDut/gkgI65e8+jNyB6gmLS9mNE6egN06fkt9Yxj+YYEQHe2h88QJ2k5SXUZskvpzXRMBlpHYlIMf9OFKHkmFLDg8awQt4PSa+jNpj+svZPcq4jOB3Wy0IisanIPQYAka24PvLQ91kV9G/apTbHLAZEijlGHw0lLruOFe86/nGXHIylpxhwThJ18FkyT3Vf+7i3/fl+2P86/ajdw11kxmG9smxBIhzD+JcexSBCJ7P62CAa9jAoDLJYOEUkF2K+yTFfZLiyrAoftesnQKyi3P14R1lmcrbeYNI78/87NodZXHwq7nZXW1/FJTIeJZqv7tvn+YY8BLExJ/khTaooLsv2YzJG+BbfqcoxgyeZw9G99mMZQq6Kmi3WbDFNHFP3URJvwfpvgMjFhL/YZCJhlW/QLtURwBH1U+ooT5VQ71EjcJeDfJyNcg0aohP1RAvUaO4VwO/XA08jRrRpsQk68P39ypRSpSYpjKpKR9cqIP6RAf1Ah3Kex1S2dPlOohPdBAv0KGy1yGVMV2uQ7SLMsn58P29OlQTHZBUtgRGzxfqoD7RQb1Ah9peh1S2dLkO4hMdxAt0qO91SGVL5+twejh83Af6DxoRFy4dEcPJiDgiKYPt9Lr2aBhbgF0gb8zO7n5RTdv3kvKPFvCzexMCuqjbaLQAZ+++Meeu/fPJDgA+GMmjDS2PrMQUgdyHlvJd9oByF/2aBByLqfi0mMBCn2uDsZbkflR+d79EZPKOxCcEAc0NyXV5RXITio8BCXVPwhwrcCMTi+UCoaBtB+KA51oPAU178e9g7OwxaoIm2u38b6xzHNDrwyrdzrovq3UR4YdqVzqn2hXPq3aR4Cf1jgXB//5aB/ReS87Divc0LOFvH/y0+pUO1a/62dUv2t7/j/N0pq99Y7WhRrXPlIRoDehDXJ67euibqsDHeVDRmcif9rP+nUOte/8oTvaq2ZPmmgfqZ3AeHNaUHcvITLtYsfAEA0Ng97EXMnvXs0zpfABnm1KUy4OjGXtrfxx4KENRdW2dD3+a68Ch9A8yuosXHg9Gx8bqfoit/e9eP8NdgPIeyCVMCuC8lfYE2b62JiLOXqh/OfnF/oKjiIvcBSNL9z7UHbM/Oj5UjYs8Mkn6e5D+UqfMAxFp/DIPxFzmmumquv6BXFOWZV9Ic5T0coaj1OnIjSSk4VVwrPcQe0E3tTuyl3RTjwOfdVMm6DP/jb0UFqvrOx/gI3tvZ8VKngdcQB/WL3R5M/JRJfuKzjPHhwa9S3+fpH/PGO5dtvlobuU+mXK96bg5bog+pDwGnb8qtxf1SMjz5bhd+M13UafgehkUfDlzAe4R6OOR1SPuQ+h7oe8mY8e56qMjOwfk+/AoMMYff8vsakXsN75EkeNZ16Mih9DLFCk/1SSR9mTWLXiO/nhd9NvhEPv2qNkD68/0ZfkS7Y4nZ4/aHULfq12yLBWlfkHVw8mJt9VkB3ikJgtSZKIVzqQZcS/RcHf89ahdHPJezZ4pk2yff1sVBo9LDPy6CLy3eAQ+DrkOeG9xBvhhC4B/sq3xTD1eaA5dwVFt70k6YP2Z3dpJ5jaTDdyfICibyYHOzRSt4Efd2k2vf1xYrhehAq+yP9XgGgxlf35BEJh4gl+3GdPX9Rfe75CPeB1EgV99T4qvvea9e17nHSPKQQoyGcQXVesmK4Jp+k989DcU8Ouf57wrVUrfQ5BPMwh4xl2WCjhyiiDuVJsoFh0gBD+lxrI2VhASDsYuRHogXhNXph6iIGEvR495BFEXQXdslJo1mmZwtStgqNAqYkIOw9dQdYOUhutFndlCYY1GcBREVWhk1oRIqocgDF1qUkMBl0iSXGyafRTx8eqiL6NoEaqXFKFdDHJWGSpLJEKCnEdBlHhEF/oMT9IB0UXaKq7Uy82SSVNVgx6NyUozYATZnSGC29Ha642yIZbbBqfILYul6/Sq2ukFq1bgo/liFynx+RWEG6jTUgaCsVSb1gKCiAArm80BYbAlIEkbdfqLtpwb9xVr0xb0xraoKSYEiSiSC/l8c+E7PbO2nUNQvdfzvZ6/2BbzMgSe+toDn9scKSIEwN4pUTSJdKx5i/QIcoo1EWKDBlJtKQytRn1LdhxCxKekPyh0lf64wRLFUjBVmbK6ogdLuE1K1kjUm6URXpoglaqBCD0+Ly+2SH4ZtPwhs8E5GoLUKSpsly112BaApLCjt2htDVEtmptqPquWqyE9BOWtKPKsxy/p4sjY5mYAZs4wimOjSJerlXWEPVcsgM8yRPQVAB0fKQsaiZ7IVmYIh6D5MQkPZr4ShwJLAZ+EVjQZsbCKgzBQLsjuQbEVQdAMhSmBjTa7elsjt7VlZ9FcL0taZbllzBXv9jpAwUVZIatom8fySB6xeuiyrcxDxB6xJRLXZwrOlcccsiE6eM8wEKq1ndlwQ9vmG92h0Wzo4DcRWiLJrwUM4Vr42OkgJChivmBhCkkRqG/PlNYaWRCoMKssLRrdsNUKogiC09CFLbruUBhMkwUBtbDGWh7iiFWVrD5Nmit8gHprBydmaG/aK2+CXrChGTmozehyQI+odb/Wn3I5o7VuUDq+gMtdUamiw8rUYQY2hm7NLlpwIGjTaS/DsL/ICaThFKCSaLlCgFdMabb0Z0wJUQBX05ixML8RRNrbTNHpdCaqssbhynY74SdmvTaDLbVOUlzZQJcNpGcwgT5qF6HKcoojxoZX8Sb4slnSNIZ1NGYOVTQFCsY5jW2XIcihrLlGsWrHWA0gWNXaPs6zPCtDlbZKTSliao6hHKj7+TEzalNQnTDo/HRGumuoQm+DsLzSqlDOIzjY1HS3CG1Jrjvo9CZQJZxRck5rKIisNEOqgXDB9GArgljm1N5gNIl0s2ObIODRjO4EdZKNbGVnKSOaDBWS0EdOQ0PZXHuh5gjE93N6B9GmHEG6BoEQVlfCDYwYdtcy2xo2tUaZGbeq2hYi2NZ4gKwgTcCYxQr1uqKlDcRuda3qVaZZryEFV6hu+5XZeghCbaPPIbOh2R7nepPNyhBLeXHVrhjUcLJxBrY5qvFrnpTL7Jqq2qY4WA/AZ5upd3y/JkuDta/64NY5Zby0q10ZGjDLjdDABrg2LuZdR7UwYqOu13VdCDoE33JlqGoFBWChQ6jOAHaJxZTQEQujGl4XcTaBusbb7dycybeGnbaoE9aQoDBypRDBqMnSuQVpwL15pzaeCEOChLmBxRd682YpLHRguE2M5zN+3Z5oU35l1TGmxZbLDWE2XHZAhex1LGzKmSwNO+ONM5s3OvMOueh3BjMpL7Q72xnL0w4ZclQLnxmjcqe0CVkXZzrjvuPzZtNbUu1JgzACnpzj1ARekAOUowejxkijNdziejJr4Qrd7AwkzdpIzS1Swrm1aZbmm60wc7x2qNodedALy0GurpuTQFm5atjqSezIloygNB/P67Y7lVaxraAWgtJeKeyONtO4uddoC3y21lObKhsVJKog2ASPbAUv15dzfag6tFT37YZrzOZ21xfDKrXNT/L41N30++zYlger3qQwXmleB8a7a78Z6PPeslQa6hI1oHNNV57nmv1xv9O2SGc8LwpkV5L6vYq+LfjGcNWdjGrdZREOxwN7abF83V92amwotQflsGz0x3m8slhTki2tJWCauAUbCsZgep9QkN66iNb5iqxqCsf6oI9BusjQaW6qpqmU7bKqGoPezJVpaooWXJwitS3TmfVbTYTnQlywGyhLNetdjEYo0PUqtFuY+mbf3VIsEtLTwQgrTMVmU2rhBXEotrW8jYCkY3xpagLVaYQGW2To2ZA0tyFrgS63CdO+hBWVrosR0w230h1h06loeYqmBdcIpxI9EIFI2W8OEBZDNWHUpemVPWq7C1/Ne9qEbtMjuD9pIrPuhO0TBMqozmQ+Yuhx1VdWVbJbdQZjdhbierdI+j1C22yxfhs2w8Jw0dNChlfz84oEupaiuO01tz3QXZZ8ZN0all2OEWZYQ/A71KLfcGsGhYDu0itxYwTYALrrQUqrecuCPXI50jhu164ECCqzoDOerXY9k6nEfVC+teza+z5ohiuxrXDakMhzyozgiM1qGpq9/Gq2XpF9hiAaBiq0aS0QN2rDC+AV0deaUxkMY2TUV+tdWinRSAtZjT1k3LKwjZ+fyqWRPKYGZLdgtPCGO6eJUTMIV7RFC4EptyRS63n1qampPJu31G0orNrOptTp00t+MduM58JM2XrLglCqmx1DI8VSia3ml7BQk0b1EO9U/AGz3ZQn+ZqEr5druhJ2rPqMZSs6BNXAouGgA1FgeEGSptNvQI01biH4FGmi3ea82vAIxyh3J13dGCCgxJSxx1dnm4Ji5WqbNsyp2LxGtVqi7I1Dqk2Azg4hXTLHzSd+pSrOuktDwZtYU8+3cmu7UeqxuKCxpKZVR2LO3RALlO4yXG0J5QscySy2LM+JdM6hubLWlBobI7eY561FxR6PjXXRXxuMhOswZ6493h7x5NbKL2dzGbLxCqFTK3aSczijT/fsdoOHnJzLlyTIRnVQ2lZcekWMU9gFJTbJjTutRv3IgHEUDEFF3KfLTayKrwY0psznbQ6xGJZb5nokoSrwVA7H3MLKj1AURXbtSglBZ5vyVu6CGWgk2giiz0a5URzAQb3pRbYix5kG1KIL6up03FVGRDPPwQ2yiaHKBJ0gntxt5WHwEPGDcehUN+HicDgUeyg+s2zLnq6d6BtfLJQN0ugp4OVgVF8VbWMKb6x+Zb4uOjAc5ki8qYpQnef52bDZ9Zd1w/brXVu18uLEccotghnOWGPFFSuABd/Y9kC3Yc3X0GRTWtfVpcYybI+iF8jYN3i7VhgzLMqtJqw3gqYCm5uMKJNlc2MKd6wVAjrTLuEibE4aGw63dfqwRRhECWb07qyc6+OkhoQdpMkFs6Ix6hgCbwhtszsuVLrMQOGCyjJHaYuw1Rw1p0uW4zo9229ztNUnkRBfE2GzxpZDuVMRFzMBHm7yHRJS1mqHqqzW64abz82BCW7LNZ/rmU64qmhemdn2MW0w1ker0aTAQ6At4UQu33EmlFyCm5aqNiYdMPZcgQO4+MTpKyucKdbaKDwPqqxF5WZo3cozmEYv6QKGTmcdEcqN2psZw8z0Fat11MCFx40NF2KB21G7YXXBjRoLksecHg1mBEPSpdR10OmoirusTaZ64EHjjlrolcR4HoSBAcmSY3pky+7O0OZU5ekBOw2jRohCkgcbx79srgF1lRzMWwuWBOWDIm5X70NQRyu5luWG+TbbYKZjnsJKqxk6HTeY5kwMVgCh1kNHhgXG+G0NQJ2UGg3QkDI5ymVLY8hpgEHb/88/+xkRjRZy5sMV6vm5wajzoubPmhyS9ukukaDXXMBiC6lQYb0oFgVfeC0PjLvNfvfzbnnj+Mi+uduVIOw2KLDxesTNdy/dASBagm+AtegfFckjdCn6Ew1J8eb51oLvflSBNKc17FJg4eHbX6LD9rsj/WA9SBKBTzjObbfSHr28+/aI7PgkqyPJ2sVYmifodqsv351I8iNYIrYlE6TcK3hU6WPUig5HmQfFJPGg1/NM/zyJO9mQ8xC68Qj7syUkADjadgFSGD+K4I8fgbdI9W6yP4HyfjmZKmdu9sl+hX/P3IKFLCJ7yOVdLD3eRvSIo9weUbQG9puZ/fka4l0hOnQwBC7J23enakmRZ+8VGH9mMpLuSi+Sw/xPzuvkDC4kB6ytfxgzQPZ7aQFJrscJfpoTN4jOEB9T5X/fRT/xCDzIKotmfzpGezcrxz0dT9qyA5DC7z9fRX7ksX8tj+LV8uA3r+VROiePqPXUrSDaqrJrce3onww0dIv3bh4w8t0ZolT55oGkX27BdYA/lt8s0+Q5LtP/GPn5b87J8M+3o7yEqfiRmC5MdoYqc7DzVPv5nApCpKogD+89SVVFzgfMpgL84JqUVHghKONGoqJPDzRpbgbOuJE3E7SK0TfJjDYPiG8LAuNI1wPt4omW9tvE5frtOcYBjPioSdy2wmebsKT/GDsQe8ANFw3YDg7db8/I+M+4cU+blSyfldfbUc43qE4qg3py4006qzofdCMV6OMFOZ+Fd5YK76PLdD4LcisV5IdX73wSYC4V4JfuOvgk4KNUwJPbET7LLMapwL58g8InQZ+kgr67c+HTWoxpOrDgkobPRDtMhfbhnuaU7duZeXzcfONxPqnnHOcXAZWqCKKdzx/IfiT+g4mPsvhszplUnO8vXks5ajpD/sexfsjjM2kfpKI9vo/tI3mPM/ho4uNMPp15JBXziH6FLvRN6R/HeZLDZxKOpyL8eInbB3F+zOADaT9m8pnMw6mYf3zwIhX550AWJZn3dS8N4sNh29fA5q8BFixdnBl82u0lRUjP8tclSQTdcqWb797tX4vTnZXRdRyDVvy/abJ3uOoKZzgHY6ySF417LN+7eeSW/T4TbTt5ReVTDDzx7j7znO43r4Nb1Yk1UJNSwQkUoNANOFoDLi+UfBOsiYvZ7x+R9k6O/wSZvqso/zzhrX7hAp4XEaly/B4sGx530r9a3hAUuXK8heomkTPgLx5kCJZBv8/EJwpULwNq/5dfXLjyqYqRTuesHz68eOgVM3l+NuD58/R8wPsWOQEhgZQBtz4k/qroimYALBHqvppIVh3X2xEG4CfRAbG8FzEq7M6D6yE4zfGaiCSxeSyN1+PG69RRyfAuiC5FewWeZnlI/Nw8DgR99XBl+cLyTYTFpXzuSvE5Jf3np1qc+e3bxqSKZxhlVPXebqx2pRjpYukSOD+j3BxkPGsSXm8Qnt+19EqDcJR+usjBjD96dcp3CDIEYt7wKYPOYc0f/1HLiR4t0uHmcGQoCz73hO8DkhxPmdcDHlPJ+hOMmqJ7um8iHt+EnvTfIPL5Frxre97d+b62awA43XtWcvhOj3vZr7LJBoK3bfB1w9rfJvSmZSX28pqtRDLeMJYoygNreZelRGmT0rygJM8pxXcx9vxoXhSy73xf2cW0r72Ao/zPL1bdRAjozpMjl6cYFy1gDPGJzNt3+09/frW/OEh9u8N4rBL8jprxovKPxAGKLm25XrOhuIj+3hbhXBN7cGz6dYOKyvSUF/rhjUDffvdjfHfBj8lVCy+aX+YmlhlbX3xj0LfvnjqczDTqhaMrHr79+SKhu0sjngk9gH338O9iJeL8rq5FTM0FDRMYIcYi3OhajFcMKr5BIC7Nd+5nefQfng7HhXdfk3/rBP7Xk2fod38BCA/etDOFAAA=";
void printWifiStatus()
{
if(TerminalAttached) {
Serial.print("SSID: "); Serial.println(WiFi.SSID());
Serial.print("Signal strength (RSSI): "); Serial.print(WiFi.RSSI()); Serial.println(" dBm");
Serial.print("IP address: "); Serial.println(WiFi.localIP());
Serial.print("Gateway: "); Serial.println(WiFi.gatewayIP());
Serial.print("Netmask: "); Serial.println(WiFi.subnetMask());
Serial.print("Webpage is at http://"); Serial.print(WiFi.localIP()); Serial.println("/");
Serial.print("Websocket is at http://"); Serial.print(WiFi.localIP()); Serial.println(":" + (String)socketPort + "/");
}
}
void WiFiConnect()
{
while (WiFi.status() != WL_CONNECTED)
{
if(TerminalAttached) {
Serial.println("Connecting to " + (String)ssid + " ...");
}
WiFi.begin(ssid, pass);
delay(5000);
}
IPAddress IP = WiFi.localIP();
IP[3] = IPLastByte;
WiFi.config(IP, WiFi.gatewayIP(), WiFi.gatewayIP(), WiFi.subnetMask());
if(TerminalAttached) {
Serial.println("Connected to " + (String)ssid);
}
webServer.begin();
socketServer.begin();
if(TerminalAttached) {
printWifiStatus();
}
//WiFi.lowPowerMode();
}
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(0, OUTPUT); // Green LED
if(TerminalAttached) {
Serial.begin(57600);
delay(5000);
}
Serial1.begin(9600);
delay(250);
led = 0;
ready_to_send = 0;
receive_state = 1;
check_byte = 0;
// check and make sure we are using the lastest Firmware
String fv = WiFi.firmwareVersion();
// Serial port initialization
if(TerminalAttached) {
Serial.println("\nYMFC-32 - MRK1010 Receiver/Web Server Started");
Serial.println("Version " + String(WIFININA_GENERIC_VERSION));
// check and make sure we are using the lastest Firmware
if (fv < WIFI_FIRMWARE_LATEST_VERSION)
{
Serial.print("Your current firmware NINA FW v");
Serial.println(fv);
Serial.print("Please upgrade the firmware to NINA FW v");
Serial.println(WIFI_FIRMWARE_LATEST_VERSION);
}
}
}
void loop() {
if(WiFi.status() != WL_CONNECTED)
{
if(TerminalAttached) {
Serial.println("Lost WiFi connection");
}
WiFi.end();
WiFiConnect();
}
WiFiClient webClient = webServer.available();
if(webClient.connected())
{
if(TerminalAttached) {
Serial.print("New client: "); Serial.print(webClient.remoteIP()); Serial.print(":"); Serial.println(webClient.remotePort());
}
String header = "";
while(webClient.available())
{
char ch = webClient.read();
if (ch != '\r')
{
header += ch;
}
if (header.substring(header.length() - 2) == "\n\n")
{
if(TerminalAttached) {
Serial.print(header.substring(0, header.length() - 1));
}
if (header.indexOf("GET / HTTP") > -1)
{
const int webpage_base64_length = sizeof(webpage_base64);
const int webpage_gz_length = base64_dec_len(webpage_base64, webpage_base64_length);
char webpage_gz[webpage_gz_length];
base64_decode(webpage_gz, webpage_base64, webpage_base64_length);
int packetsize = 1024;
int done = 0;
webClient.println("HTTP/1.1 200 OK\nContent-Type: text/html\nContent-Encoding: gzip\n");
while (webpage_gz_length > done)
{
if (webpage_gz_length - done < packetsize) {
packetsize = webpage_gz_length - done;
}
webClient.write(webpage_gz + done, packetsize * sizeof(char));
done = done + packetsize;
}
if(TerminalAttached) {
Serial.println("--Interface webpage sent");
}
}
else
{
webClient.println("HTTP/1.1 404 Not Found\nContent-Type: text/plain; charset=utf-8\n\n404 Not Found\n");
if(TerminalAttached) {
Serial.println("--Page not found");
}
}
webClient.stop();
if(TerminalAttached) {
Serial.println("--Client disconnected");
}
}
}
}
if(!socketClient.connected())
{
socketClient = socketServer.available();
if (socketClient.connected() && webSocketServer.handshake(socketClient))
{
if(TerminalAttached) {
Serial.print("\n--Websocket connected to: ");
Serial.print(socketClient.remoteIP());
Serial.print(":");
Serial.println(socketClient.remotePort());
}
}
else
{
socketClient.stop();
delay(100);
}
}
if(socketClient.connected())
{
// Background Init - setup the background tasks, runs only once
if(Backgroundinit == true) {
Backgroundinit = false;
String data = webSocketServer.getData();
if(TerminalAttached) {
Serial.println("Websocket Flushed");
}
// flush the serial1 port - Arduion to Arduino comms
while(Serial1.available()) {
char ch = Serial1.read();
}
if(TerminalAttached) {
Serial.println("Serial Port 1 Flushed");
Serial.println("Background Init Complete");
}
}
// Background Process 1
// see if we have a command/request from the user
String data = webSocketServer.getData();
if (data.length() > 0)
{
//String cmd = data.substring(0, data.indexOf(":"));
//String setting = data.substring(data.indexOf(":") + 1);
// get tools to parse incoming request
char buf[data.length()+1];
data.toCharArray(buf, sizeof(buf));
char *token;
char *pter = buf;
byte i = 0;
String cmd;
String subcommand;
String usrVal;
while ((token = strtok_r(pter, ":", &pter)))
{
switch(i) {
case 0:
cmd = token;
break;
case 1:
subcommand = token;
break;
case 2:
usrVal = token;
break;
}
i++;
}
if(TerminalAttached) {
Serial.println("CMD: " + String(cmd));
Serial.println("Subcommand: " + String(subcommand));
Serial.println("UsrVal: " + String(usrVal));
}
// process command
switch (cmd.toInt()) {
//do something (1-9 are the PID buttons - they don't get sent, they are added to 20 and 21)
// minus
case 20:
subcommand = "Minus";
break;
// plus
case 21:
subcommand = "Plus";
break;
// user command
case 30:
if(subcommand == "Ledon") {
digitalWrite(0, HIGH);
webSocketServer.sendData("R:" + cmd + " - " + subcommand);
} else if (subcommand == "Ledoff") {
digitalWrite(0, LOW);
webSocketServer.sendData("R:" + cmd + " - " + subcommand);
}else if (subcommand == "Pidr") {
webSocketServer.sendData("R:" + String(pid_p_gain_roll) + ":" + String(pid_i_gain_roll) + ":" + String(pid_d_gain_roll));
}else if (subcommand == "Pidy") {
webSocketServer.sendData("R:" + String(pid_p_gain_yaw) + ":" + String(pid_i_gain_yaw) + ":" + String(pid_d_gain_yaw));
} else if (subcommand == "Pida") {
webSocketServer.sendData("R:" + String(pid_p_gain_altitude) + ":" + String(pid_i_gain_altitude) + ":" + String(pid_d_gain_altitude));
} else if (subcommand == "Rst") {
reset_data();
webSocketServer.sendData("R:Reset Sent");
} else {
webSocketServer.sendData("E:" + cmd + " - " + subcommand);
}
break;
// user command
case 40:
if (subcommand == "CRP") {
ymc32_command = 1;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_p_gain_roll) + ">>" + String(usrVal));
} else if (subcommand == "CRI") {
ymc32_command = 2;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_i_gain_roll) + ">>" + String(usrVal));
} else if (subcommand == "CRD") {
ymc32_command = 3;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_d_gain_roll) + ">>" + String(usrVal));
} else if (subcommand == "CYP") {
ymc32_command = 4;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_p_gain_yaw) + ">>" + String(usrVal));
} else if (subcommand == "CYI") {
ymc32_command = 5;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_i_gain_yaw) + ">>" + String(usrVal));
} else if (subcommand == "CYD") {
ymc32_command = 6;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_d_gain_yaw) + ">>" + String(usrVal));
} else if (subcommand == "CAP") {
ymc32_command = 7;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_p_gain_altitude) + ">>" + String(usrVal));
} else if (subcommand == "CAI") {
ymc32_command = 8;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_i_gain_altitude) + ">>" + String(usrVal));
} else if (subcommand == "CAD") {
ymc32_command = 9;
init_telemetry_data(usrVal);
webSocketServer.sendData("P:" + String(pid_d_gain_altitude) + ">>" + String(usrVal));
} else {
webSocketServer.sendData("E:" + cmd + " - " + subcommand);
}
break;
case 50:
if (subcommand == "TTC") {
ymc32_command = 10;
init_telemetry_data("0");
webSocketServer.sendData("R:" + cmd + " - MTT Sent");
}
if (subcommand == "SPD") {
ymc32_command = 11;
init_telemetry_data("0");
webSocketServer.sendData("R:" + cmd + " - Save PID Sent");
}
if (subcommand == "RTH") {
ymc32_command = 12;
init_telemetry_data("0");
webSocketServer.sendData("R:" + cmd + " - RTH Sent");
}
if (subcommand == "RDC") {
ymc32_command = 99;
init_telemetry_data("0");
webSocketServer.sendData("R:" + cmd + " - Drop Requested");
}
break;
default:
break;
}
// process response
switch (cmd.toInt()) {
// minus response
case 20:
webSocketServer.sendData("R:" + cmd + " - " + subcommand);
break;
// plus response
case 21:
webSocketServer.sendData("R:" + cmd + " - " + subcommand);
break;
case 30:
break;
case 40:
break;
case 50:
break;
default:
webSocketServer.sendData("E:" + cmd + " - " + subcommand);
break;
}
}
}
// Background Process 2
if(Serial1.available()) { //If there are bytes available.
receive_byte = Serial1.read(); //Load them in the received_buffer array.
switch (receive_state) {
// waiting for start
case 1:
if(receive_byte == 'B') {
if(receive_byte_previous == 'J') {
receive_buffer_counter = 2;
receive_buffer[0] = 'J';
receive_buffer[1] = 'B';
receive_state = 2;
}
}
receive_byte_previous = receive_byte;
break;
// building buffer
case 2:
receive_buffer[receive_buffer_counter++] = receive_byte;
// see if we have a valid buffer
if(receive_buffer_counter == rec_telemetry_last_byte) {
check_byte = 0; //Reset the check_byte variable.
for(temp_byte=0;temp_byte < (rec_telemetry_last_byte - 1); temp_byte ++) {
check_byte ^= receive_buffer[temp_byte]; //Calculate the check_byte.
}
// valid buffer
if(check_byte == receive_buffer[(rec_telemetry_last_byte - 1)]) {
get_data(); //If there are two start signatures detected there could be a complete data set available.
process_data();
if(TerminalAttached) {
print_telemetry_data();
}
// send status up date to webserver
if(socketClient.connected()) {
webpage_data();
}
} else {
receive_byte_previous = receive_byte;
receive_state = 1;
}
} else if (receive_buffer_counter > rec_telemetry_last_byte) {
receive_byte_previous = receive_byte;
receive_state = 1;
}
break;
}
}
// Background Process 3
// see if we have something to send, if so do it
if(ready_to_send == 1) {
send_telemetry_data();
}
// Background Process 4
// background delay and heart beat
if(led == 0) {
led = 1;
digitalWrite(LED_BUILTIN, HIGH);
} else {
led = 0;
digitalWrite(LED_BUILTIN, LOW);
}
}
//When there are two start signatures received the received data between them can be tested to se if it is a valid data stream.
void get_data(void){
current_receive = millis() - last_receive;
last_receive = millis(); //Remember when this reception has arrived.
//In the following lines the different variables are restored from the valid data stream.
//The name of the variables are the same as in the YMFC-32 flight controller program.
error = receive_buffer[2];
flight_mode = receive_buffer[3];
debug_byte = receive_buffer[4];
temperature = receive_buffer[5] | receive_buffer[6] << 8;
roll_angle = receive_buffer[7] - 100;
pitch_angle = receive_buffer[8] - 100;
start_byte = receive_buffer[9];
altitude_meters = (receive_buffer[10] | receive_buffer[11] << 8) - 1000;
takeoff_throttle = receive_buffer[12] | receive_buffer[13] << 8;
actual_compass_heading = receive_buffer[14] | receive_buffer[15] << 8;
heading_lock = receive_buffer[16];
number_used_sats = receive_buffer[17];
fix_type = receive_buffer[18];
l_lat_gps = (int32_t)receive_buffer[19] | (int32_t)receive_buffer[20] << 8 | (int32_t)receive_buffer[21] << 16 | (int32_t)receive_buffer[22] << 24;
l_lon_gps = (int32_t)receive_buffer[23] | (int32_t)receive_buffer[24] << 8 | (int32_t)receive_buffer[25] << 16 | (int32_t)receive_buffer[26] << 24;
loop_timer = (int32_t)receive_buffer[27] | (int32_t)receive_buffer[28] << 8 | (int32_t)receive_buffer[29] << 16 | (int32_t)receive_buffer[30] << 24;
pid_p_gain_roll = (float)(receive_buffer[31] | receive_buffer[32] << 8)/1000;
pid_i_gain_roll = (float)(receive_buffer[33] | receive_buffer[34] << 8)/1000;
pid_d_gain_roll = (float)(receive_buffer[35] | receive_buffer[36] << 8)/1000;
pid_p_gain_yaw = (float)(receive_buffer[37] | receive_buffer[38] << 8)/1000;
pid_i_gain_yaw = (float)(receive_buffer[39] | receive_buffer[40] << 8)/1000;
pid_d_gain_yaw = (float)(receive_buffer[41] | receive_buffer[42] << 8)/1000;
pid_p_gain_altitude = (float)(receive_buffer[43] | receive_buffer[44] << 8)/1000;
pid_i_gain_altitude = (float)(receive_buffer[45] | receive_buffer[46] << 8)/1000;
pid_d_gain_altitude = (float)(receive_buffer[47] | receive_buffer[48] << 8)/1000;
battery_voltage = (float)(receive_buffer[49] | receive_buffer[50] << 8)/100;
manual_takeoff = receive_buffer[51] | receive_buffer[52] << 8;
return_to_home_command = receive_buffer[53];
}
//Process the data for the Web page
void process_data(void){
//System Status
//create battery min and max values
if((battery_voltage <= battery_voltage_min) | (battery_voltage_min == 0)) {
battery_voltage_min = battery_voltage;
}
if(battery_voltage >= battery_voltage_max) {
battery_voltage_max = battery_voltage;
}
//telemetry processing time
if((current_receive <= current_receive_min) | ( current_receive_min == 0)) {
current_receive_min = current_receive;
}
if(current_receive >= current_receive_max) {
current_receive_max = current_receive;
}
//loop_timer processing time
if((loop_timer <= loop_timer_min) | ( loop_timer_min == 0)) {
loop_timer_min = loop_timer;
}
if(loop_timer >= loop_timer_max) {
loop_timer_max = loop_timer;
}
// Flight Status
//Roll angle
if((roll_angle <= roll_angle_min) | ( roll_angle_min == 0)) {
roll_angle_min = roll_angle;
}
if(roll_angle >= roll_angle_max) {
roll_angle_max = roll_angle;
}
//Pitch angle
if((pitch_angle <= pitch_angle_min) | ( pitch_angle_min == 0)) {
pitch_angle_min = pitch_angle;
}
if(pitch_angle >= pitch_angle_max) {
pitch_angle_max = pitch_angle;
}
//Altitude Meters
if((altitude_meters <= altitude_meters_min) | ( altitude_meters_min == 0)) {
altitude_meters_min = altitude_meters;
}
if(altitude_meters >= altitude_meters_max) {
altitude_meters_max = altitude_meters;
}
//Temperature
if((temperature <= temperature_min) | ( temperature_min == 0)) {
temperature_min = temperature;
}
if(temperature >= temperature_max) {
temperature_max = temperature;
}
}
//Process the data for the Web page
void reset_data(void){
ymc32_command = 0;
ymc32_fval = 0;
check_byte = 0;
ready_to_send = 1;
battery_voltage_min = battery_voltage_max = 0;
current_receive_min = current_receive_max = 0;
loop_timer_min = loop_timer_max = 0;
roll_angle_min = roll_angle_max = 0;
pitch_angle_min = pitch_angle_max = 0;
altitude_meters_min = altitude_meters_max = 0;
temperature_min = temperature_max = 0;
}




{kind=link}
Comments