

It moves!
The first week, we focused on chassis designs so this week was all about getting the circuitry to work with a polished chassis.
After brainstorming ideas last week, I decided to go with a three-wheel design and design a remote with four essential functions: forward, back, left, and right.
The Process
I first wired a quick circuit that powered the motors so that I could put together a cardboard prototype of my design and test it.
I just wanted to make sure the 3-wheel design would run with the weight of arduino, battery pack, and motor controller and also used this cardboard prototype to gauge my measurements to cut out my real chassis on acrylic. Here's a little video of my test run. (There's no code or switched involved at all for this one)
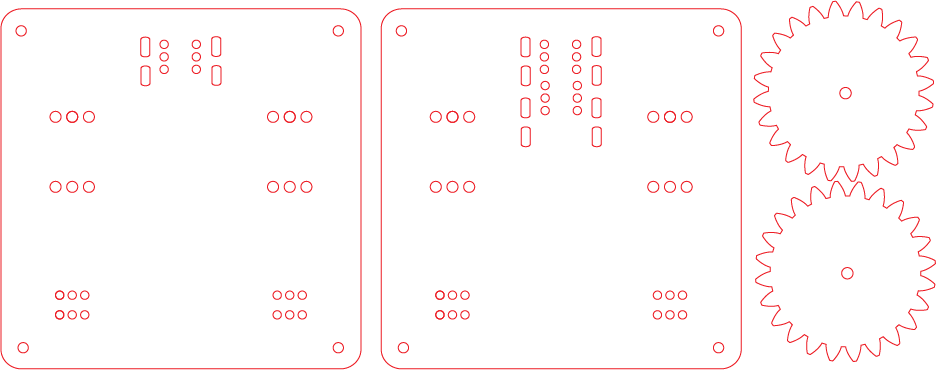
Now that I had a cardboard prototype that could move forward, I designed my AI file to cut out.
It seemed like the easiest way to keep my motors in place would be using zip ties so I positioned holes throughout the design so I could thread them through.
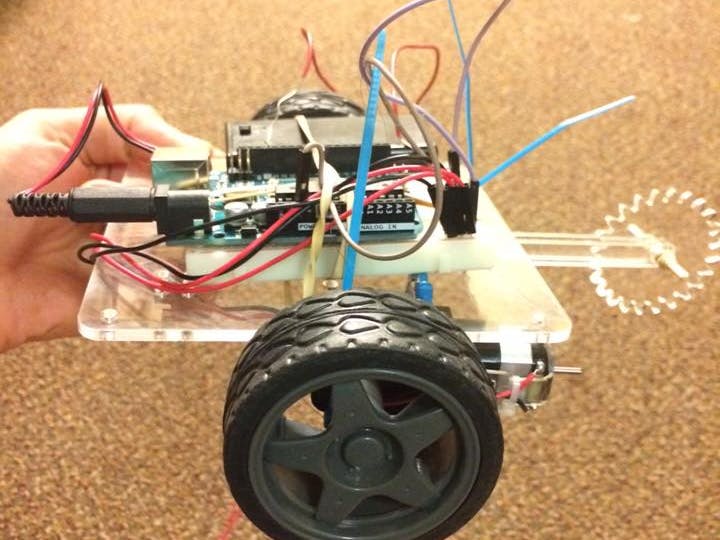
After laser cutting my chassis, however, I realized a lot of my measurements were off and it would be a lot more difficult than I anticipated to hold my arduino, battery pack, and motor control in place cleanly. This is going to be my biggest focus other than soldering before I submit my final project. Right now everything is held in place with rubber bands and I know that's terrible but its the best I could do given the time I had left.
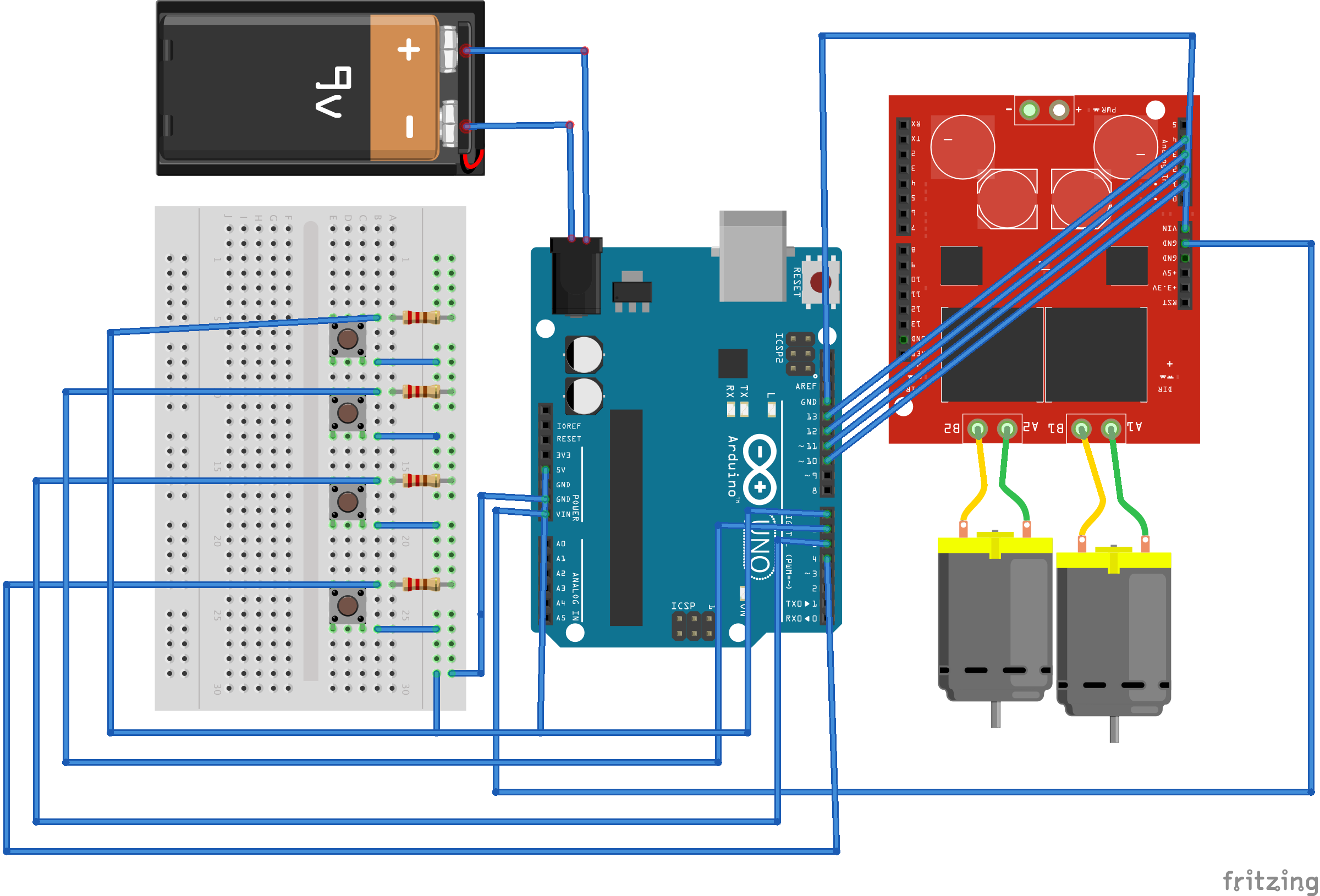
Putting together the circuitry was mainly about mapping button presses to events. I split my code into 4 if else statements and wired my switches accordingly to the motor controller and arduino.
The wires are a little short for a remote control, but I figure that's something I'll fix when I use the prototyping shield. Here's a little demo of what I worked on for the past two weeks :)
Conclusion
The most important thing I've probably learned in this class is that fabricating your designs is a lot more difficult than it seems; it's a deeply iterative process. I cant wait to put everything together for next week and fix all the flaws I found this time around! I'm hoping that once the circuit is soldered and I fix my chassis, the final vehicle will be pretty awesome.
{kind=link}
{kind=link}

Comments