
This project outlines the build of a wireless digital scale. The original idea was to build a Twister like game using the K82 board. However, the selected force sensors are relatively expensive so a scaled down prototype was build to demonstrate the proof of concept.
The data from the radio are relayed to another NRF24 gateway. For the tests I used two different Freescale boards loaded with the same firmware.
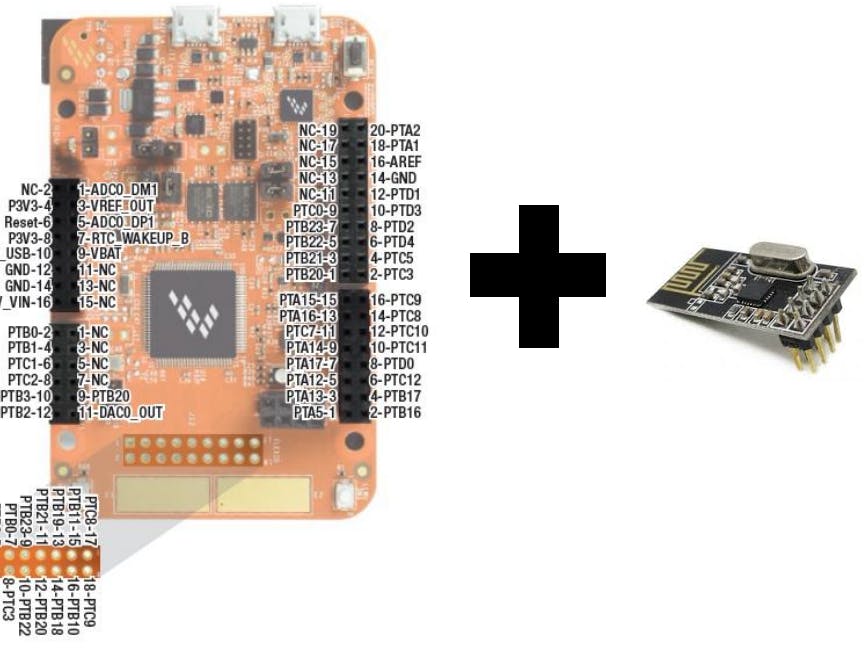
HardwareThe hardware consists of an FRDM k82 board from NXP together with a low cost 2.4 GHz radio. An op-amp and a force sensing resistor were also used to build a moderately accurate weight sensor.
The NRF24L01P is mounted on header J22. SPI0 was used to interface with the radio.
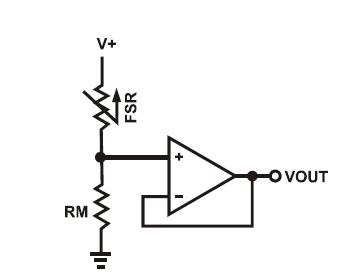
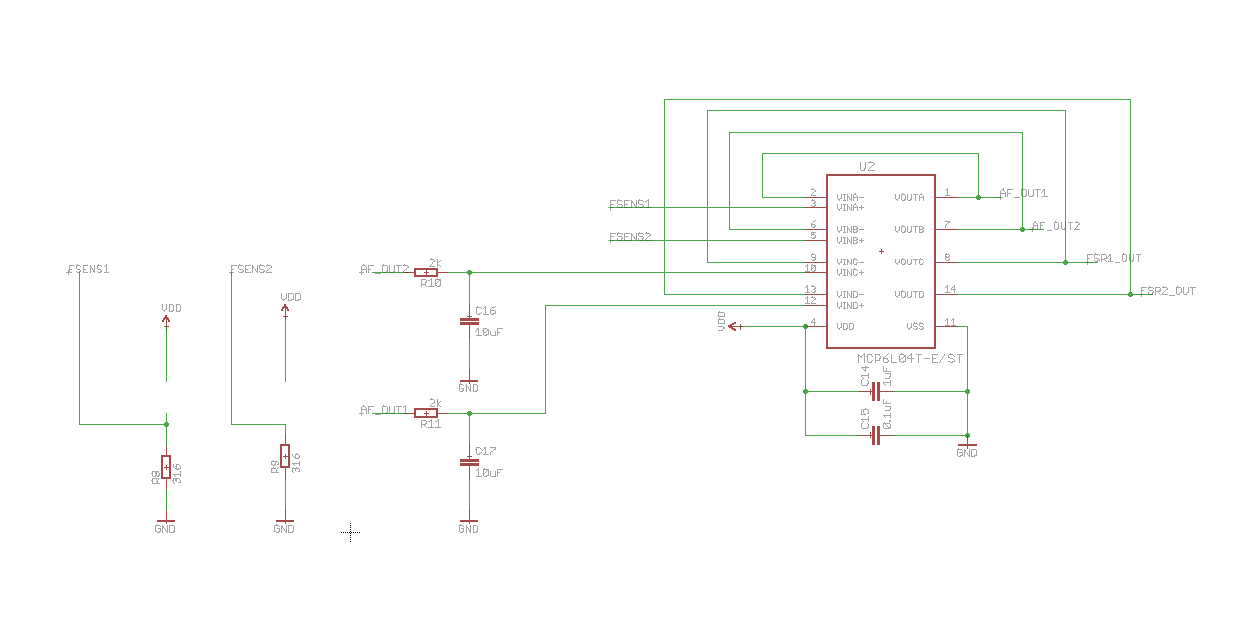
The FSR sensor needs an analog front-end to interface with the board. Since the sensor has a relatively high resistance when no weight is placed upon it, a voltage divider together with an op-amp configured as a buffer was used.
The FSR sensor is not linear so the more weight one puts upon the sensor the lower the resistance becomes.
FirmwareI used Kinetis Design Studio and SDK 2.0 to code the application. All of the low level drivers were adapted from the examples.
The main radio firmware is a C port of the ManiacBug CPP library. The low power ADC is configured in polling mode to sample channel ADC0 where the FSR is connected.
The app takes an analog reading of the force sensor and send it via radio to a base station. On the receive side the data is printed on the terminal.
{kind=link}
{kind=link}
Comments