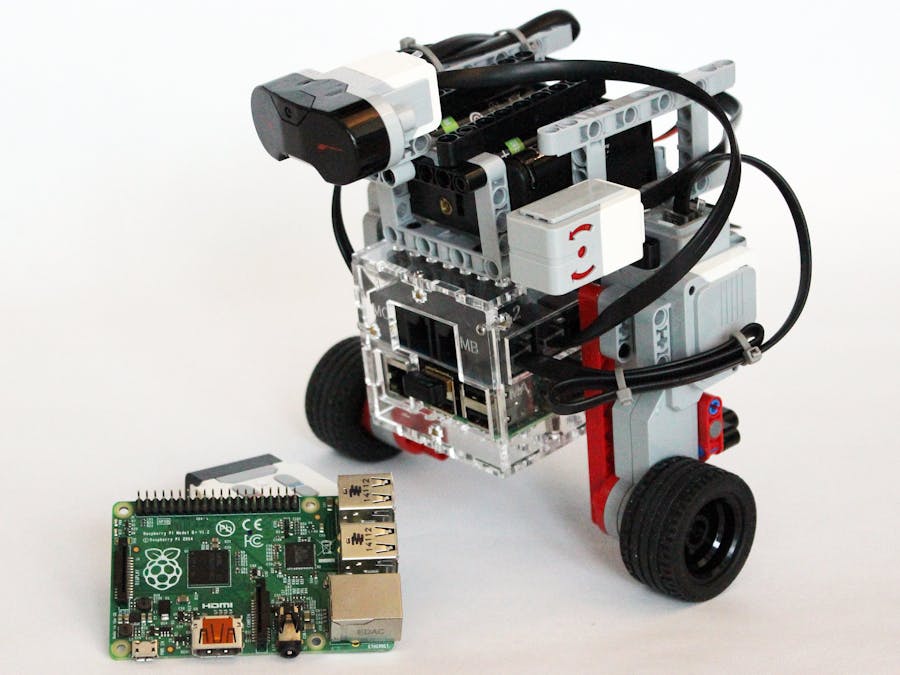
IntroductionIn this project, we build a balancing robot with the Raspberry Pi, some LEGO Mindstorms, and the BrickPi3. We provide full build instructions and software to create your own Raspberry Pi Balancing Robot. The software runs on Python, and reads the EV3 gyroscope to balance the robot. The movement is controlled with the LEGO remote control.
Step 1: Parts NeededTo build the Raspberry Pi balancing robot you’ll need the following:
- A WiFi Dongle – We use the Dexter Industries WiFi Dongle
Step 2: Build Instructions
You can find full building instructions in LEGO Digital Designer format here. The parts are all included in the LEGO Mindstorms EV3 Kit. All the parts to build your Raspberry Pi LEGO BalanceBot!
Step 3: Running the Software
All of the software to run the BrickPi3 Balancebot is free, and available for download on Github here. In the command line, enter the directory where you’ve downloaded the BalanceBot.py. Run the file with the command:
sudo python BalanceBot.py
You will see on-screen instructions for setting up and running the BalanceBot!
Questions?Ask us on our forums here!



Comments