

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
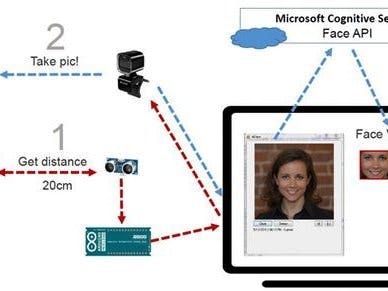
Next generation applications will certainly have some AI services into their existing functionality. In this project Arduino is used to activate when the picture is taken based on a distance sensor.
Microsoft Cognitive Services - Face APIFace API is a cloud-based API that provides the most advanced algorithms for face detection and recognition. The main functionality of Face API can be divided into two categories: face detection with attributes extraction and face recognition.
First you have to apply for a Key that will be used in your application, if you have more than 30,000 transactions per month and less than 20 per minute is FREE else you could get it from Azure.
You can learn more about FaceAPI and get some sample codes from here https://www.microsoft.com/cognitive-services/en-us/face-api/documentation/overview
Web CameraI've been using a Microsoft Live camera connected to a PC and WebCam Library for WinForm and WPF, this control is pretty easy to use and implement into your applications
Developer can add one line of code for display video from webcam and capture image from webcam. It provide dialog for resolution setting and advance setting (Flip,Rotate, Brightness etc.) by adding one line of code.
Application will also save locally pictures on daily folders and generates html reports.
I wanted to get the picture when someone is at a certain distance. For this I've been using a MKR1000 + HC-SR04 distance sensor.
- MKR - SENSOR
- A0 - ECHO
- A1 - TRIG
- 5V - VCC
- GND - GND
Code samples you can find bellow - just modify the Wi-fi connection details and also proper libraries such as aREST, WiFi101.
DasData storageYou can easily store result into a data channel offered for free by DasData
Click on the duplicate dataset and enter your email, change the key codes into your code and you're ready to go.








Comments