

This is the easiest way to control a servo motor by a joystick module. Some tutorials require a breadboard and a motor shield, but in this tutorial only basic tools are needed and we will not needing other peripherals.
Materials Needed
Hardware:
Arduino Uno | Get it here
Servo Motor | Get it here
Joy Stick Module | Get it here
Jumper Wires | Get it here
Software:
_____________________________________________________________
Instructions:
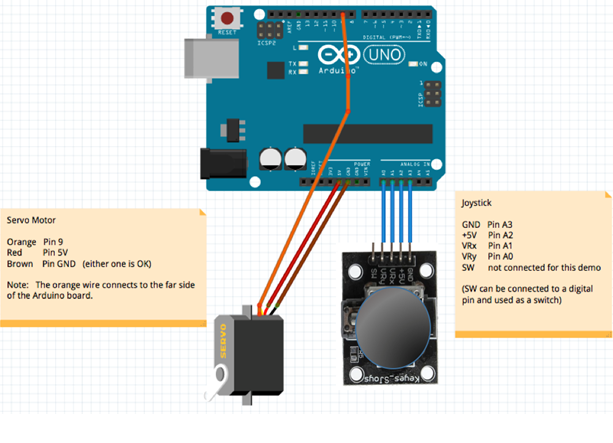
Wiring the Joy Stick Module to the Arduino
GND connect to Pin A3
+5v connect to Pin A2
VRx connect to Pin A1
VRy connect to Pin A0
(SW can be connected to a digital pin and used as a switch)
Servo Motor
Orange connect to Pin 9
Red connect to Pin 5v
Brown connect to Pin GND (either one is Good)
Note! The orange wire connects to the far side of the Arduino board.
..........
......................................................
To give support on this channel.
Donate.
Paypal: https://www.paypal.com/paypalme2/dardelacruz/5
Bitcoin: 3HHaJVzMhAKX5NUc6cayo7xcCdKJov5MDg
Ethereum: 0x04ba643cFC5EBcC8E57B038d39Eec2E52ED85710
Like and Follow.
Twitter: twitter.com/dardelacruz
Facebook: facebook.com/darwindelacruzofficial
{kind=link}

Comments