#############
## Modified and used as open source
#!/usr/bin/env python
'''
Track a green ball using OpenCV.
Copyright (C) 2015 Conan Zhao and Simon D. Levy
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as
published by the Free Software Foundation, either version 3 of the
License, or (at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
'''
import cv2
import numpy as np
from time import sleep
import serial
# For OpenCV2 image display
WINDOW_NAME = 'GreenBallTracker'
def track(image, on_target, count=0):
# Assume no centroid
ctr = (-1,-1)
total_y_center = int(round(image.shape[0]/2))
total_x_center = int(round(image.shape[1]/2))
if not count % 10 == 0:
return ((ctr), (total_x_center,total_y_center))
'''Accepts BGR image as Numpy array
Returns: (x,y) coordinates of centroid if found
(-1,-1) if no centroid was found
None if user hit ESC
'''
# Blur the image to reduce noise
blur = cv2.GaussianBlur(image, (5,5),0)
#image = image[200:800, 400:1500]
# Convert BGR to HSV
hsv = cv2.cvtColor(blur, cv2.COLOR_BGR2HSV)
# Threshold the HSV image for only green colors
lower_green = np.array([40,70,70])
upper_green = np.array([80,200,200])
# Threshold the HSV image to get only green colors
mask = cv2.inRange(hsv, lower_green, upper_green)
# Blur the mask
bmask = cv2.GaussianBlur(mask, (5,5),0)
# Take the moments to get the centroid
moments = cv2.moments(bmask)
m00 = moments['m00']
centroid_x, centroid_y = None, None
if m00 != 0:
centroid_x = int(moments['m10']/m00)
centroid_y = int(moments['m01']/m00)
print(image.shape)
if on_target:
cv2.circle(image, (total_x_center,total_y_center), 50, (0,255,0))
else:
cv2.circle(image, (total_x_center,total_y_center), 50, (0,0,255))
# Use centroid if it exists
if centroid_x != None and centroid_y != None:
ctr = (centroid_x, centroid_y)
cv2.circle(image, ctr, 50, (0,0,0))
print(round(total_x_center),int(round(total_y_center))),(int(round(centroid_x)),int(round(centroid_y)))
cv2.line(image,(int(round(total_x_center)),int(round(total_y_center))),(int(round(centroid_x)),int(round(centroid_y))),(0,0,0),5)
# Display full-color image
cv2.imshow(WINDOW_NAME, image)
# Force image display, setting centroid to None on ESC key input
if cv2.waitKey(1) & 0xFF == 27:
ctr = None
# Return coordinates of centroid
# print(ctr)
return (ctr, (total_x_center,total_y_center))
###########
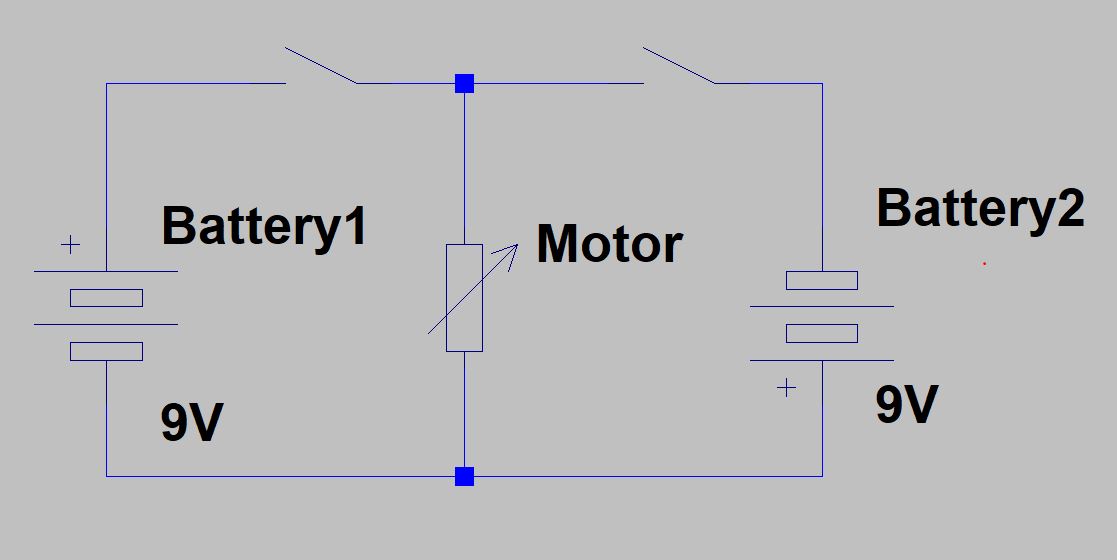
def motor_1_right():
ser.write('1')
print ("motor one right")
def motor_1_left():
ser.write('2')
print ("motor one left")
def motor_1_off():
ser.write('3') #send 0
print ("Motor one OFF")
def motor_2_right():
ser.write('4')
print ("motor two right")
def motor_2_left():
ser.write('5')
print ("motor two left")
def motor_2_off():
ser.write('6') #send 0
print ("Motor two OFF")
ser = serial.Serial('/dev/cu.usbmodem1441', 9600) # Establish the connection on a specific port
sleep(2)
LIMIT = 5
CENTER = 75
# Test with input from camera
if __name__ == '__main__':
motor_one_left = 0
motor_one_right = 0
motor_two_left = 0
motor_two_right = 0
capture = cv2.VideoCapture(1)
on_target = False
while True:
okay, image = capture.read()
if okay:
corr, center = track(image, on_target)
if cv2.waitKey(1) & 0xFF == 27:
break
print(corr[0], corr[1])
##Reset
motor_1_off()
motor_2_off()
if (corr[0] == -1 and corr[1] == -1):
continue
## Within 100px stay still
if abs(corr[0] - center[0]) < CENTER:
motor_1_off()
elif (corr[0] - center[0]) > 0 and motor_1_right <= LIMIT:
motor_1_right()
motor_one_right+=1
motor_one_left-=1
elif motor_one_left <= LIMIT:
motor_1_left()
motor_one_left+=1
motor_one_right-=1
if abs(corr[1] - center[1]) < CENTER:
motor_2_off()
elif (corr[1] - center[1]) > 0 and motor_two_right <= LIMIT:
motor_2_right()
motor_two_right+=1
motor_two_left-=1
elif motor_two_left <= LIMIT:
motor_2_left()
motor_two_left+=1
motor_two_right-=1
if abs(corr[0] - center[0]) < CENTER and abs(corr[1] - center[1]) < CENTER:
on_target = True
else:
on_target = False
else:
print('Capture failed')
break





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















{kind=link}
{kind=link}
{kind=link}
Comments