


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
I got my LeapMotion sometime last year but I haven't put it to much use outside of the sample VR apps that came with it. After discovering a Java SDK for it, I decided to use it to control a Rover that I built.
Here are some prerequisites for software installation that must be done prior to implementing the system:
- Java and Leap Motion: Follow the instructions on https://developer.leapmotion.com/documentation/java/index.html to properly install the necessary Java libraries for the LeapMotion and to properly set your classpath when you work on your Java code.
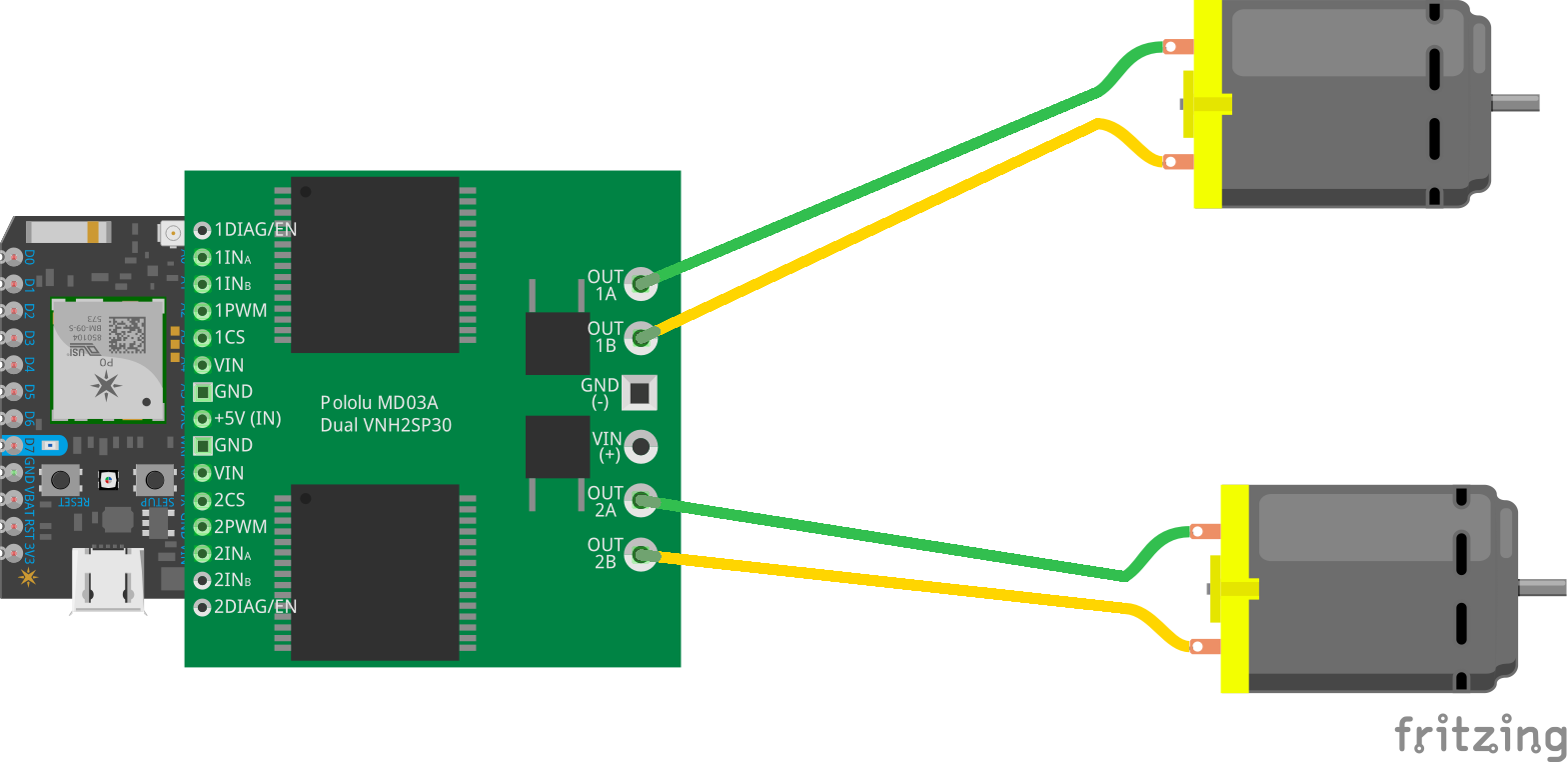
- Photon: Ensure that the following libraries are installed in order to make your Photon code work with the PhoBot shield.
Here is a video of the bot in action:

9 projects • 28 followers
Software engineer with professional experience creating, maintaining, integrating, and testing software in Windows and Unix environments.

{kind=link}
Comments