#include <Wire.h>
#include <TimerOne.h>
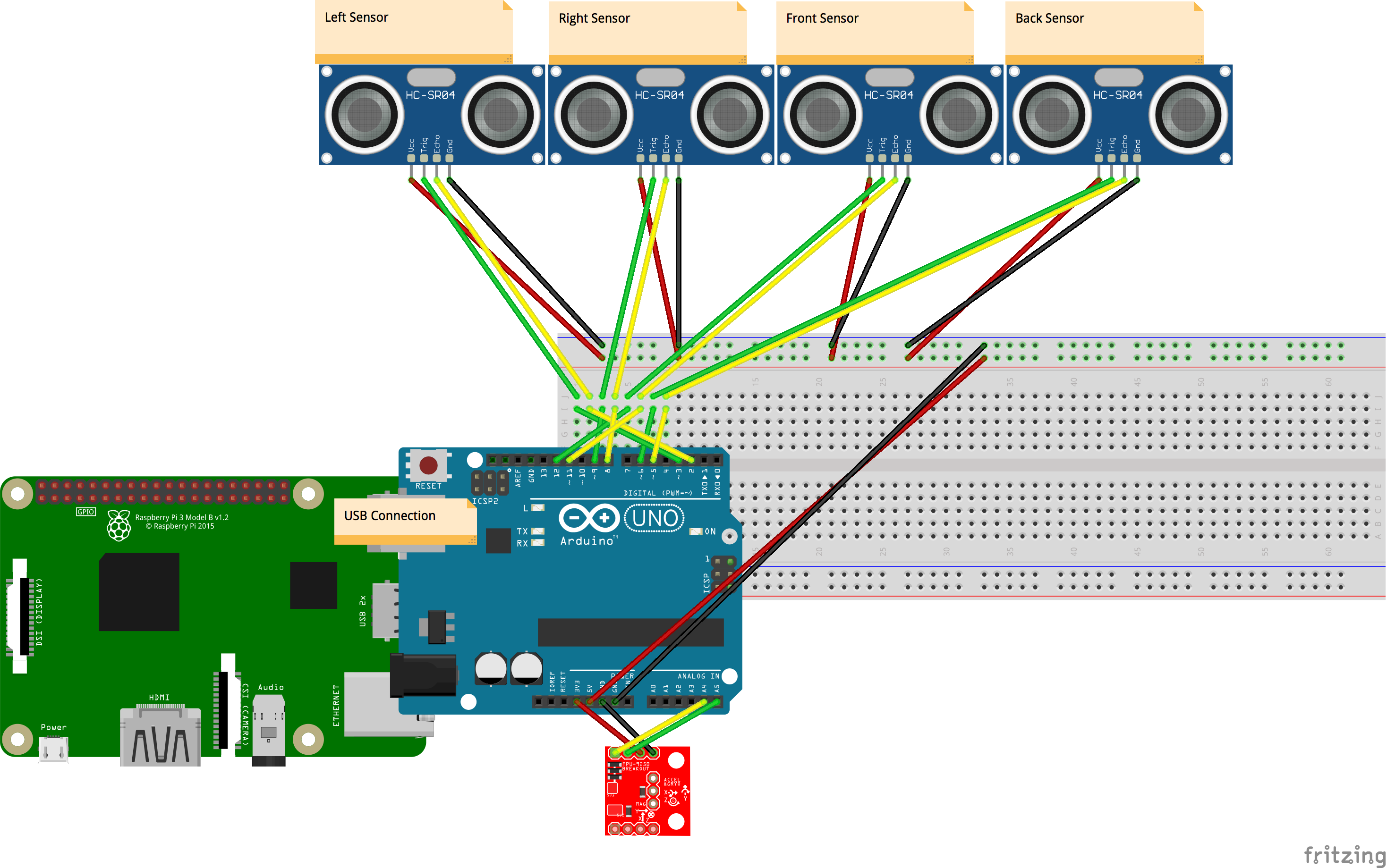
#define tpLEFT 3
#define epLEFT 2
#define tpBACK 6
#define epBACK 5
#define tpRIGHT 9
#define epRIGHT 8
#define tpFRONT 12
#define epFRONT 11
void I2Cread(uint8_t Address, uint8_t Register, uint8_t Nbytes, uint8_t* Data)
{
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.endTransmission();
Wire.requestFrom(Address, Nbytes);
uint8_t index = 0;
while (Wire.available())
Data[index++] = Wire.read();
}
void I2CwriteByte(uint8_t Address, uint8_t Register, uint8_t Data)
{
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.write(Data);
Wire.endTransmission();
}
long int ti;
volatile bool intFlag = false;
void setup()
{
delay(100);
pinMode(LED_BUILTIN, OUTPUT);
Wire.begin();
Serial.begin(115200);
I2CwriteByte(0x68, 29, 0x06);
I2CwriteByte(0x68, 26, 0x06);
I2CwriteByte(0x68, 27, 0x10);
I2CwriteByte(0x68, 28, 0x08);
I2CwriteByte(0x68, 0x37, 0x02);
I2CwriteByte(0x0C, 0x0A, 0x16);
pinMode(13, OUTPUT);
Timer1.initialize(10000);
Timer1.attachInterrupt(callback);
ti = millis();
pinMode(tpLEFT, OUTPUT);
pinMode(epLEFT, INPUT);
pinMode(tpBACK, OUTPUT);
pinMode(epBACK, INPUT);
pinMode(tpRIGHT, OUTPUT);
pinMode(epRIGHT, INPUT);
pinMode(tpFRONT, OUTPUT);
pinMode(epFRONT, INPUT);
// delay(100);
}
long int cpt = 0;
void callback()
{
intFlag = true;
digitalWrite(13, digitalRead(13) ^ 1);
}
int count = 0;
int ringRing;
void loop()
{
// while(millis()<10000)
// {
// count++;
// ringRing = ' ';
// if(Serial.available() > 0) {
// ringRing = Serial.read();
// Serial.print("RINGRING: "+ringRing);
// }
// if(ringRing == 122) {
// readData();
// }
readData();
//}
//Serial.print("COUNT: ");
//Serial.print(count);
}
void readData()
{
delay(20);
int left = getDistance(tpLEFT, epLEFT);
int right = getDistance(tpRIGHT, epRIGHT);
int front = getDistance(tpFRONT, epFRONT);
int back = getDistance(tpBACK, epBACK);
int threshold = 50;
Serial.print(" st ");
if (left < threshold && left != 0)
{
Serial.print(" left ");
}
if (right < threshold && right != 0)
{
Serial.print(" right ");
}
if (front < 10 && front != 0)
{
Serial.print(" front ");
}
if (back < threshold && back != 0)
{
Serial.print(" back ");
}
Serial.print("et ");
while (!intFlag);
intFlag = false;
uint8_t Buf[14];
I2Cread(0x68, 0x3B, 14, Buf);
//acc
int16_t ax = -(Buf[0] << 8 | Buf[1]);
int16_t ay = -(Buf[2] << 8 | Buf[3]);
int16_t az = Buf[4] << 8 | Buf[5];
// gyr
int16_t gx = -(Buf[8] << 8 | Buf[9]);
int16_t gy = -(Buf[10] << 8 | Buf[11]);
int16_t gz = Buf[12] << 8 | Buf[13];
// acc
Serial.print(ax, DEC);
Serial.print(" ");
Serial.print(ay, DEC);
Serial.print(" ");
Serial.print(az, DEC);
Serial.print(" ea ");
// gyr
Serial.print(gx, DEC);
Serial.print(" ");
Serial.print(gy, DEC);
Serial.print(" ");
Serial.print(gz, DEC);
Serial.print(" END");
uint8_t ST1;
do
{
I2Cread(0x0C, 0x02, 1, &ST1);
}
while (!(ST1 & 0x01));
Serial.println();
}
int getDistance(int trigPin, int echoPin)
{
long duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH, 20000);
if (duration == 0)
{
pinMode(echoPin, OUTPUT);
digitalWrite(echoPin, LOW);
delayMicroseconds(200);
pinMode(echoPin, INPUT);
}
distance = (duration / 2) / 29.1;
return distance;
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments