


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
This project has been imagine in an educational Way, I would built some interactive machines for helping kids to understand New technology.
The Theme is Music, because it's universal and it's nice for kids.
I built two machines who plays music in a different way !
The aim and a demonstration of the project can be fin in this video :
This project is in two part and can be extend one day !
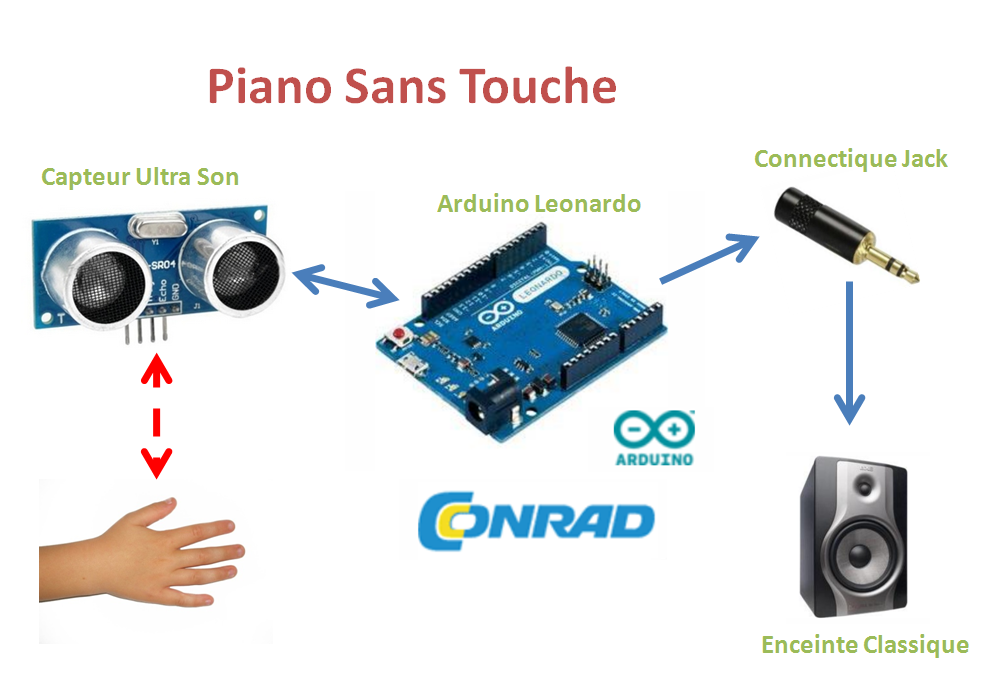
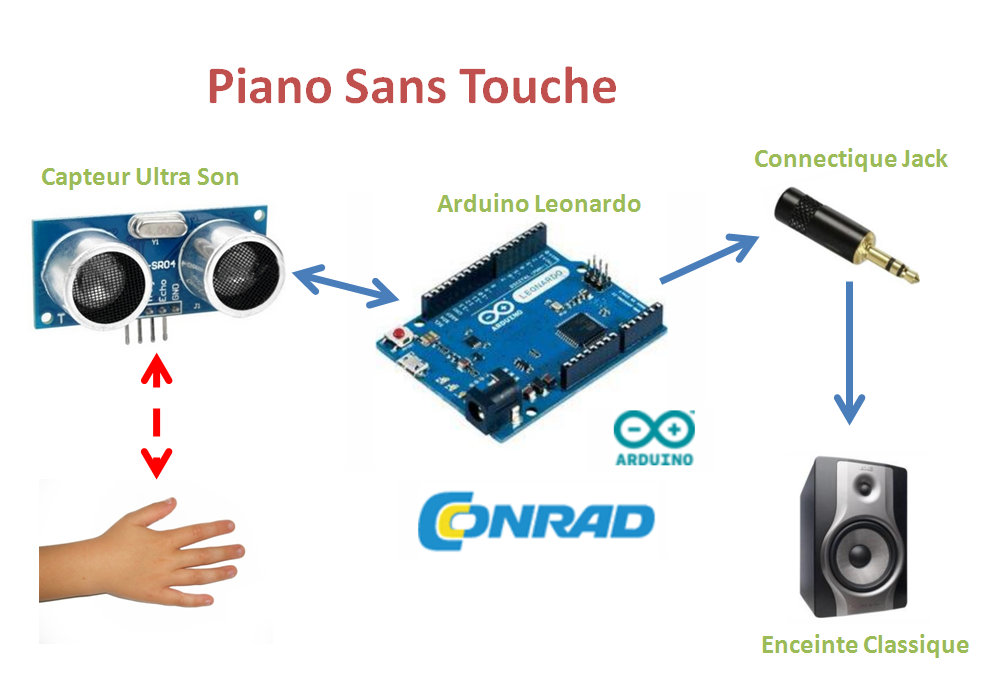
1. An No-Contact Piano
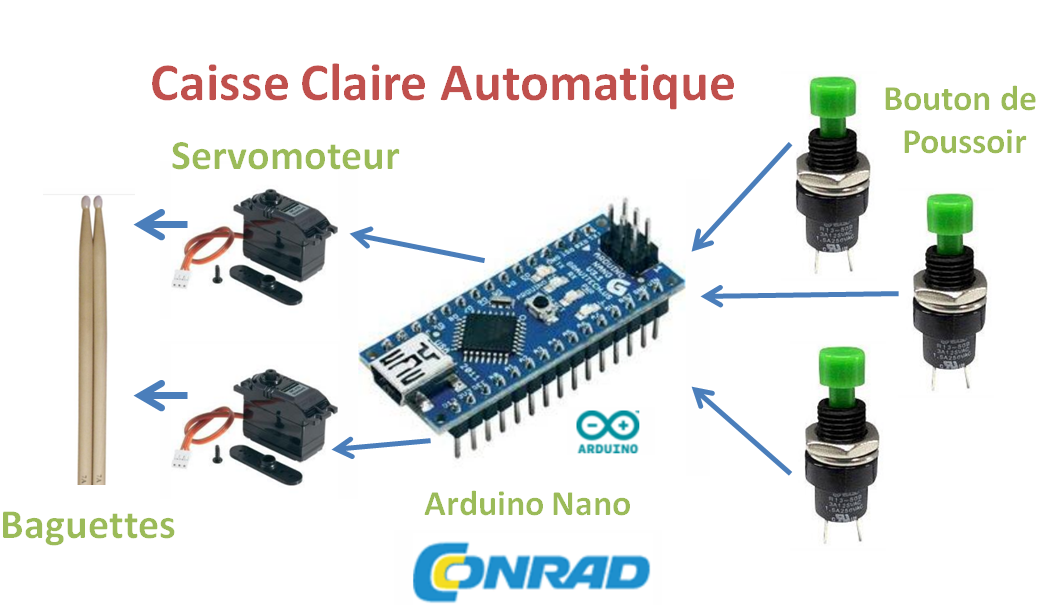
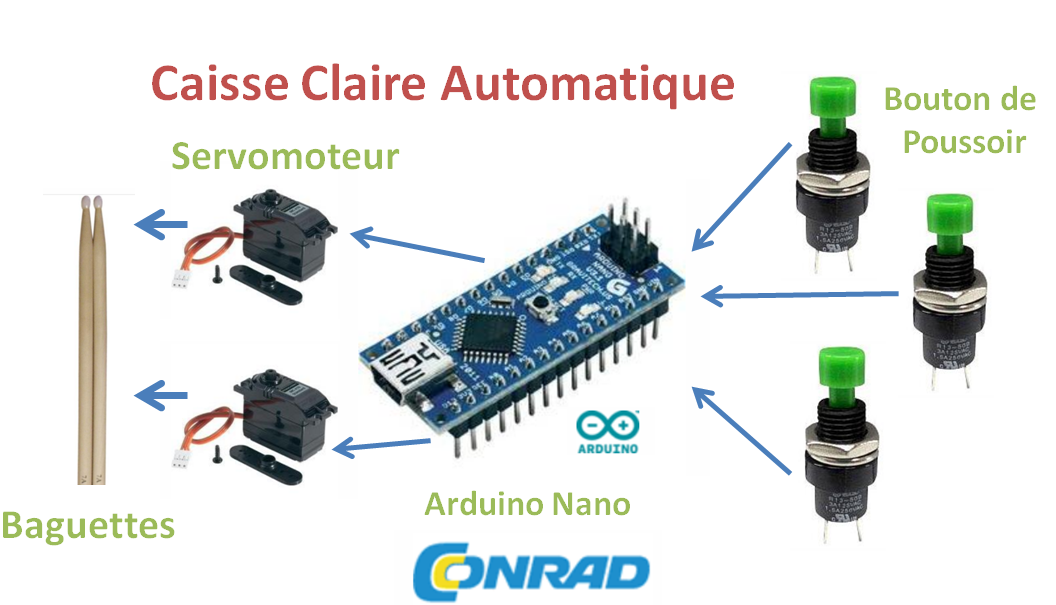
2.An Automatics drum !
This System is an interactive piano wich you will never touch anything !
Just shake your hand at the top of the device and music will be play !
More high is your hand, more Sharp is the sound.
More down is your hand, more Low is the sound !
HOW IT'S WORK ?????
Hum... Intresting schematic.
So, the "capteur Ultra son" wich Means Ultrasonic Sensor will give us a distance.
And we will convert this distance in a frequency !!
Ready ?
Lets Play :
a. Electronics Part :
- Put a wire between GND of the HC - SR04 sensor and the GND of the Arduino
- Put a wire between VCC of the HC - SR04 sensor and the 5V of the Arduino
- Put a wire between TRIG and the I/O N°12 of the ARDUINO
- Put a wire between ECHO and the I/O N°13 of the ARDUINO
------------------Ultrasonic Part Done--------------------
Find a jack Plug Somwhere ^^
- Connect the + of the jack at the I/O N°11 of the ARDUINO
- Connect the - of the jack at the GND of the ARDUINO
If your plug is not with screw... use a soldering iron to help your wire to be connected.
b. Software Part :
Then you can deploy the code below :
// Name the pin as led.
#define speaker 11
// Set the Snt end Pin & Receive Pin.
int trig = 12;
int echo = 13;
long cmm;
void setup()
{
pinMode(trig, OUTPUT);
digitalWrite(trig, LOW);
pinMode(echo, INPUT);
Serial.begin(9600);
}
void loop()
{
// Set a timer.
long start = millis();
cmm=What_Range();
if(cmm>10 && cmm<70)
{
tone(speaker, 440*cmm/30);
delay(100);
}
else
{
delay(10);
}
Serial.println(cmm);
noTone(speaker); // arbitrary delay to limit data to serial port
}
int What_Range()
{
int cm;
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
cm = pulseIn(echo, HIGH) / 58;
return(cm);
}
c. Test Part
Now you can plug the jack to your speaker (can be the Hi-Fi speaker of your bedroom !!)
Put your hand in front of the sensor and... Have fun !!
#DavidGuetta #FrenchSong #D.I.Y
Now lets moove on to the second music instrument : The amazing Automatic Drum.
This Drum has be made for lazy poeple or for poeple who just can't drum correctly... (Like me :-( )
You have in your hand a remote with two buttons, if you push the left buttons, the left stick hit the drum and if you push the right button : EVRYTHING FALL DOWN IN AN EXPLOSION... hum... no in fact the right stick hit the drum ^^
Lets explain this with a schem :
So for this module you will need
-Two Servomotor
-Two Potentiometer
-Three Buttons
-An Arduino Nano
a. Electronic part :
- Connect two Servomotors to the PIN 9 and 6 of your arduino.
- Connect two led to the PIN 7 and 8 of your arduino [Help for Debug]
- Connect two potentiometer to the PIN A0 and A1. [control Position and speed]
- Connect tree buttons to the PIN 12, 2 , 4.
Some help to connect your button and led :
Ok now we are ready to deploy our programm :
b. Sofware
You can conect the usb Wire, open arduino and deploy this programm :
#include <Servo.h>
Servo myservo1; // create servo object to control a servo
Servo myservo2;
int pos = 0;
int pos1 = 0;
int potpin0 = 0; // analog pin used to connect the potentiometer
int potpin1 = 1;
int angleMaxGauche;
int angleMinGauche;
int angleMaxDroite;
int angleMinDroite;
int temp;
int boutonIni = 12;
int bouton0 = 2;
int bouton1 = 4;
int led1 = 8;
void setup() {
myservo1.attach(9);
myservo2.attach(6);
// attaches the servo on pin 9 to the servo object
pinMode(boutonIni, INPUT);
pinMode(bouton0, INPUT);
pinMode(bouton1, INPUT);
pinMode(led1, OUTPUT);
Serial.begin(9600);
// digitalWrite(led1, HIGH);
initialisation(); //on entre les positions min et max des servo
Serial.println(angleMaxGauche);
Serial.println(angleMinGauche);
Serial.println(angleMaxDroite);
Serial.println(angleMinDroite);
}
void loop() {
temp=pota(); //lit la valeur de la vitesse de la baguette (potard droit)
if(digitalRead(bouton0)==LOW){
baguetteGauche(temp);
} else if(digitalRead(bouton1)==LOW) {
baguetteDroite(temp);
} else if(digitalRead(bouton0)==LOW && digitalRead(bouton1)==LOW){
baguetteGauche(temp);
baguetteDroite(temp);
}
}
void baguetteGauche(int temp) {
digitalWrite(8,HIGH);
for (pos = angleMinGauche; pos <= angleMaxGauche; pos += 5) {
myservo1.write(pos);
delay(temp);
}
for (pos = angleMaxGauche; pos >= angleMinGauche; pos -= 5) {
myservo1.write(pos);
delay(temp);
}
digitalWrite(8,LOW);
}
void baguetteDroite(int temp) {
digitalWrite(7,HIGH);
for (pos1 = angleMaxDroite; pos1 <= angleMinDroite; pos1 += 5) {
myservo2.write(pos1);
delay(temp);
}
for (pos1 = angleMinGauche; pos1 >= angleMaxGauche; pos1 -= 5) {
myservo2.write(pos1);
delay(temp);
}
digitalWrite(7,LOW);
}
int pota(){
int poti = analogRead(A1);
poti = map(poti, 0, 1023, 5, 50);
return poti;
}
void initialisation(){
int val1 = analogRead(A0);
// Serial.read(boutonIni);
Serial.println("Initialiser angle de frappe du moteur gauche");
while(digitalRead(boutonIni)==HIGH){
val1 = analogRead(A0);
val1 = map(val1, 0, 1023, 0, 180);
myservo1.write(val1);
delay(10);
}
delay(1000);
angleMaxGauche = val1;
int val2 = analogRead(A0);
Serial.println("Initialiser angle de repos du moteur gauche");
while(digitalRead(boutonIni)==HIGH){
val2 = analogRead(A0);
val2 = map(val2, 0, 1023, 0, 180);
myservo1.write(val2);
delay(10);
}
delay(1000);
angleMinGauche = val2;
int val3 = analogRead(A0);
Serial.println("Initialiser angle de frappe du moteur droite");
while(digitalRead(boutonIni)==HIGH){
val3 = analogRead(A0);
val3 = map(val3, 0, 1023, 0, 180);
myservo2.write(val3);
delay(10);
}
delay(1000);
angleMaxDroite = val3;
int val4 = analogRead(A0);
Serial.println("Initialiser angle de repos du moteur droite");
while(digitalRead(boutonIni)==HIGH){
val4 = analogRead(A0);
val4 = map(val4, 0, 1023, 0, 180);
myservo2.write(val4);
delay(10);
}
delay(1000);
angleMinDroite = val4;
}
well done !
c. Use it
Sothe initialisation is started automatically :
Start with the left motor :
--Set the maximum position with the potentiometer A0, validate by pushing the button on pin 12.
--Set the minimum position with the potentiometer A0, validate by pushing the button on pin 12
Now the left motor :
--Set the maximum position with the potentiometer A0, validate by pushing the button on pin 12.
--Set the minimum position with the potentiometer A0, validate by pushing the button on pin 12
And it's over !!
So now you can play by pushing button 2 and 4 !
It's too slow ? No problem, the potentiometer A0 is here to control the speed of the motor.
Thank to Conard and Maximiliens Saunier For helping Me in this project !
Have Fun







{kind=link}
{kind=link}
Comments