#include <EEPROM.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SH1106.h>
#include <Fonts/nunitoTiny.h>
#include <Fonts/makoSmall.h>
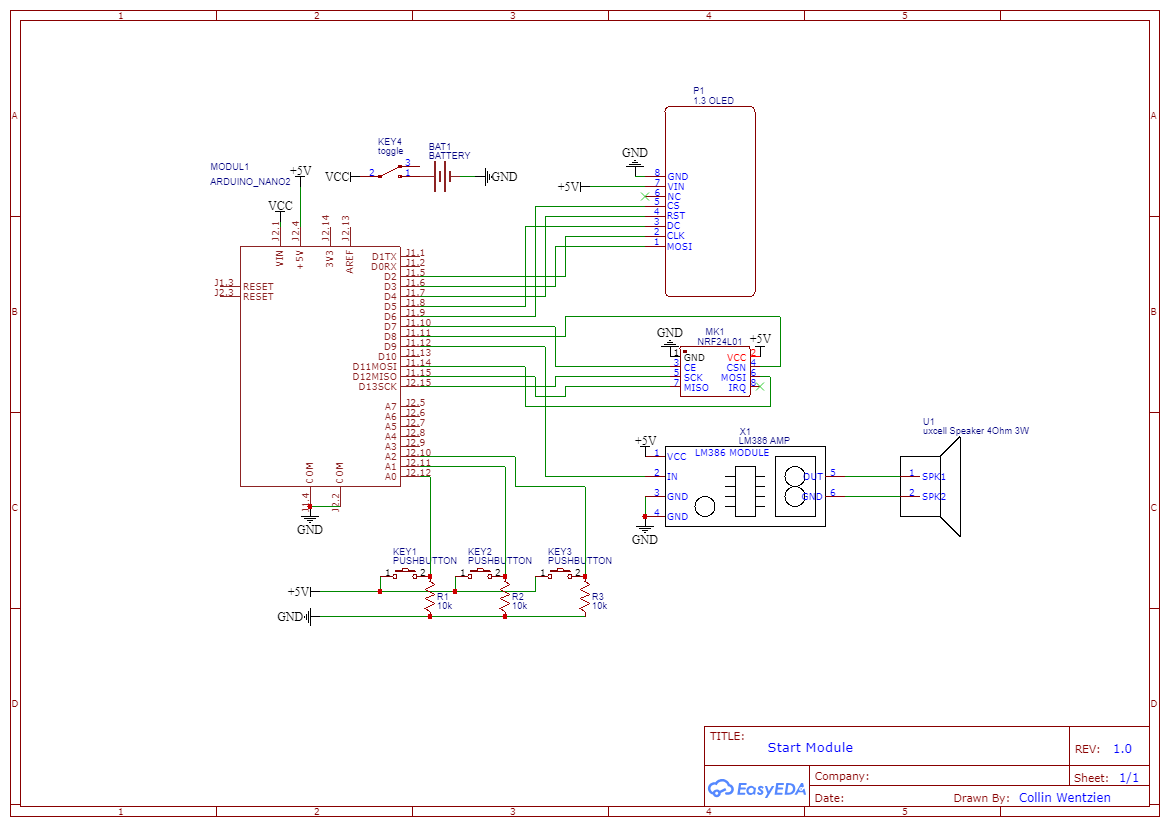
#define OLED_CLK 2
#define OLED_MOSI 3
#define OLED_RESET 4
#define OLED_DC 5
#define OLED_CS 6
Adafruit_SH1106 tft(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
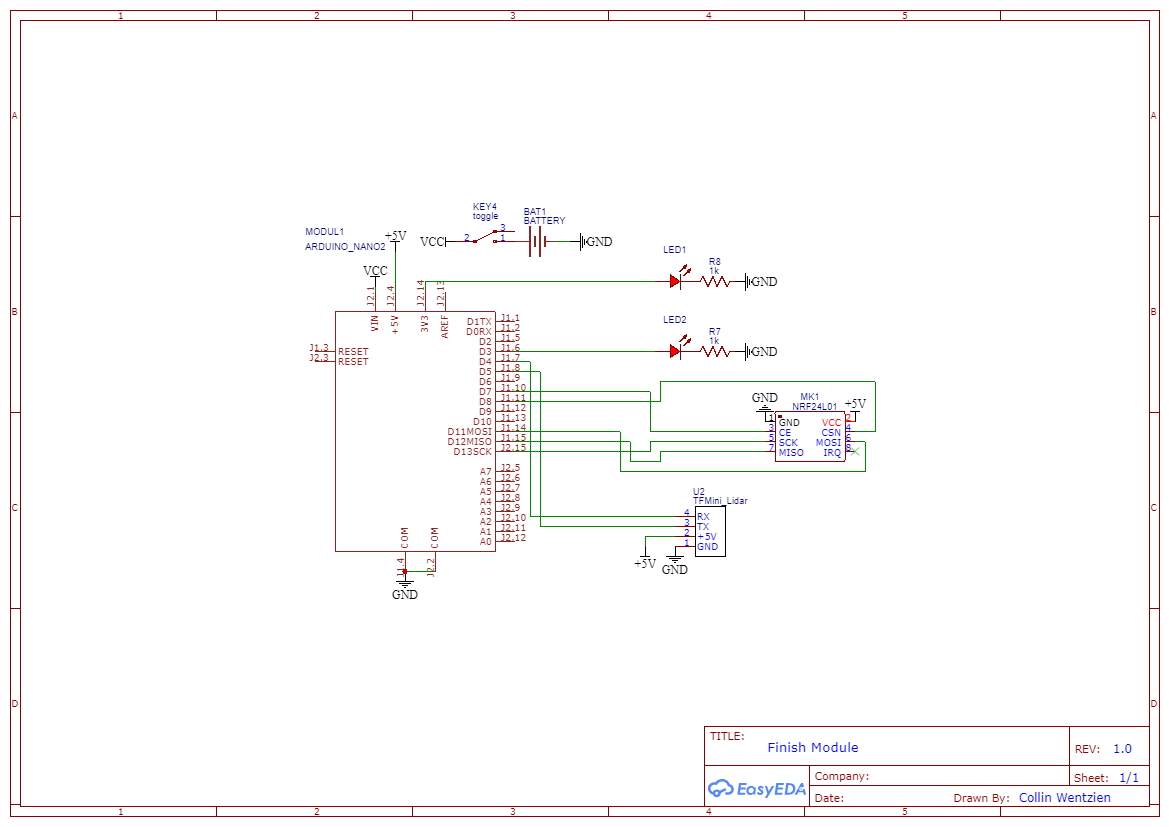
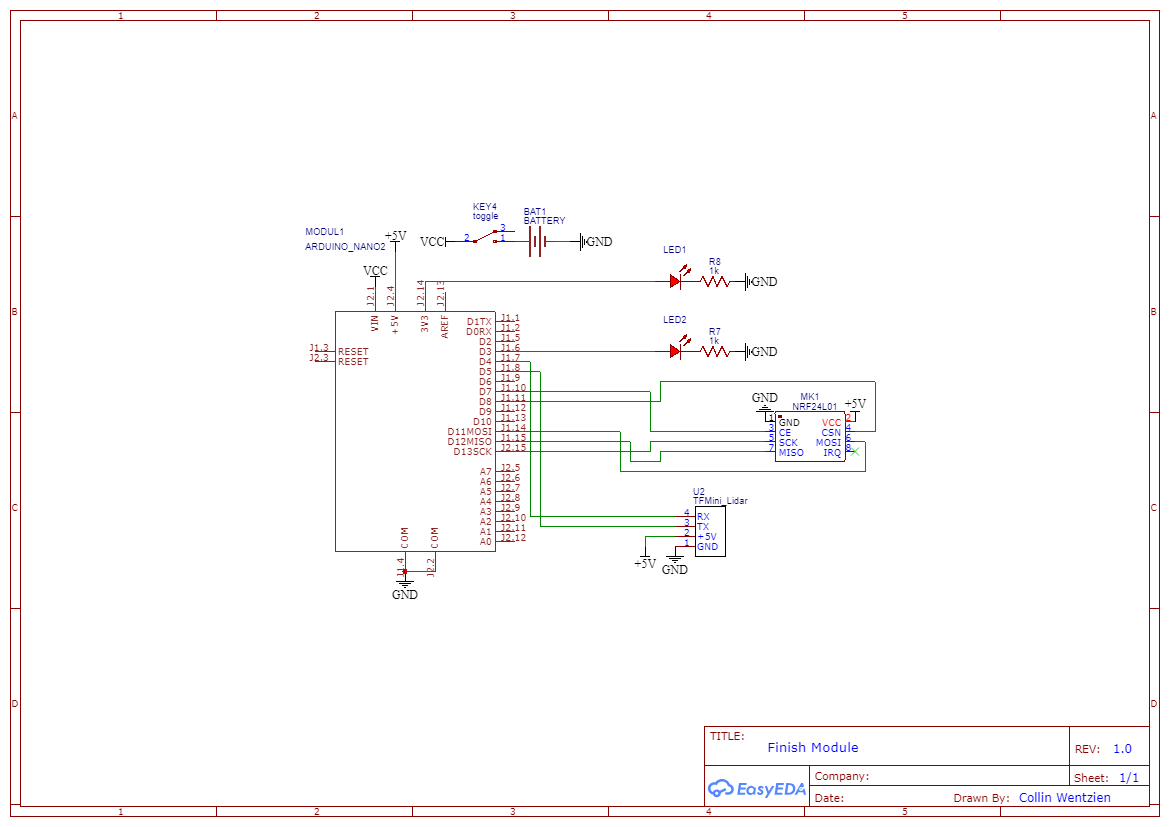
RF24 radio(7, 8);
const byte addr[6] = "00001";
int up, down, select;
int pressed = -1;
int app = 0;
int mode = 0;
int menu = 0;
int m1 = 0; int m2 = 0; int s1 = 0; int s2 = 0; int s = 0;
int mm1 = 0; int mm2 = 0; int ss1 = 0; int ss2 = 0; int ss = 0;
boolean tme = false;
boolean done = false;
int times = 0;
int amt = 0;
unsigned long curr;
unsigned long prev;
int interval = 92;
int last;
// ----- BITMAPS ----- //
const unsigned char sprint[] PROGMEM = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x7f, 0xfe,
0x00, 0x00,
0x01, 0x40,
0x02, 0xc0,
0x00, 0x00,
0x7f, 0xfe,
0x00, 0x00,
0x3c, 0x00,
0x20, 0x00,
0x00, 0x00,
0x7f, 0xfe,
0x00, 0x00,
0x00, 0x00
};
const unsigned char lap[] PROGMEM = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x0f, 0xf0,
0x3f, 0xfc,
0x38, 0x1c,
0x70, 0x0e,
0x60, 0x06,
0x60, 0x06,
0x70, 0x0e,
0x38, 0x1c,
0x3f, 0xfc,
0x0f, 0xf0,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
const unsigned char count[] PROGMEM = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x7f, 0xfe,
0x6f, 0xb6,
0x55, 0x2a,
0x57, 0xba,
0x55, 0xb6,
0x6f, 0xa2,
0x7f, 0xfe,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM settings[] = {
0x00, 0x00,
0x01, 0x80,
0x01, 0x80,
0x19, 0x98,
0x1d, 0xb8,
0x0f, 0xf0,
0x07, 0xe0,
0x7e, 0x7e,
0x7e, 0x7e,
0x07, 0xe0,
0x0f, 0xf0,
0x1d, 0xb8,
0x19, 0x98,
0x01, 0x80,
0x01, 0x80,
0x00, 0x00
};
static const unsigned char PROGMEM autos[] = {
0x00, 0x00,
0x03, 0xc0,
0x01, 0x80,
0x03, 0xc0,
0x0d, 0x30,
0x10, 0x28,
0x10, 0x48,
0x20, 0x44,
0x21, 0x8c,
0x31, 0x84,
0x20, 0x04,
0x10, 0x08,
0x10, 0x08,
0x0c, 0xb0,
0x03, 0xc0,
0x00, 0x00
};
static const unsigned char PROGMEM manual[] = {
0x00, 0x00,
0x00, 0x00,
0x03, 0xc0,
0x0c, 0x30,
0x10, 0x08,
0x10, 0x08,
0x26, 0x64,
0x28, 0x94,
0x2a, 0x94,
0x26, 0x64,
0x10, 0x08,
0x10, 0x08,
0x0c, 0x30,
0x03, 0xc0,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM back[] = {
0x00, 0x00,
0x00, 0x00,
0x08, 0x00,
0x18, 0x00,
0x3f, 0xe0,
0x3f, 0xf8,
0x18, 0x38,
0x08, 0x1c,
0x00, 0x1c,
0x00, 0x38,
0x0f, 0xf8,
0x0f, 0xe0,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM dist[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x7f, 0xfe,
0x7f, 0xfe,
0x6f, 0xbe,
0x6d, 0xb6,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM sound[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x20,
0x02, 0x10,
0x06, 0x88,
0x1e, 0x48,
0x1e, 0x48,
0x06, 0x88,
0x02, 0x10,
0x00, 0x20,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM nosound[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x80,
0x01, 0x80,
0x07, 0x80,
0x07, 0x80,
0x01, 0x80,
0x00, 0x80,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
static const unsigned char PROGMEM racecal[] = {
0x00, 0x00,
0x00, 0x00,
0x00, 0x00,
0x7f, 0xfe,
0x00, 0x00,
0x51, 0xc0,
0x2a, 0x20,
0x50, 0x40,
0x28, 0x80,
0x50, 0x00,
0x28, 0x80,
0x00, 0x00,
0x7f, 0xfe,
0x00, 0x00,
0x00, 0x00,
0x00, 0x00
};
void setup() {
Serial.begin(115200);
pinMode(14, INPUT);
pinMode(15, INPUT);
pinMode(16, INPUT);
pinMode(9, INPUT);
tft.begin(SH1106_SWITCHCAPVCC);
radio.begin();
radio.openReadingPipe(0, addr);
radio.setPALevel(RF24_PA_MIN);
radio.startListening();
radio.flush_rx();
tft.clearDisplay();
tft.setTextColor(WHITE);
int x, y;
int16_t x1, y1;
uint16_t w, h;
tft.setFont(&nunitoTiny);
tft.getTextBounds("Welcome", x, y, &x1, &y1, &w, &h);
tft.setCursor(63 - (w / 2), 37);
tft.print("Welcome");
tft.display();
int bar = 0;
while(bar < 128) {
tft.fillRect(0, 61, bar, 4, WHITE);
bar = bar + random(1, 6);
delay(random(4, 8));
tft.display();
}
tft.fillRect(0, 61, 128, 4, BLACK);
tft.display();
if(EEPROM.read(0) > 2) {
EEPROM.write(0, 0);
}
if(EEPROM.read(1) > 10) {
EEPROM.write(1, 5);
}
if(EEPROM.read(0) == 0) {
tone(9, 440, 100);
delay(100);
tone(9, 659, 100);
delay(100);
}
noTone(9);
delay(800);
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
void drawApp(int appl) {
tft.clearDisplay();
if(appl == 0) {
tme = false;
tft.setFont(&makoSmall);
tft.setCursor(46, 18);
tft.print("Sprint");
tft.setCursor(46, 29);
tft.print("Lap");
tft.setCursor(46, 40);
tft.print("Counter");
tft.setCursor(46, 51);
tft.print("Settings");
} else if(appl == 1) {
tft.setFont(&makoSmall);
tft.setCursor(46, 20);
tft.print("Automatic");
tft.setCursor(46, 36);
tft.print("Manual");
tft.setCursor(46, 52);
tft.print("Back");
} else if(appl == 2) {
tft.setFont(&makoSmall);
tft.setCursor(3, 8);
tft.print("Sprint");
tft.drawLine(3, 49, 123, 49, WHITE);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
tft.setCursor(100, 60);
tft.print("Back");
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
m1 = 0; m2 = 0; s1 = 0; s2 = 0; s = 0;
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
tme = true;
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 523, 150);
delay(random(1800, 3500));
tone(9, 523, 150);
delay(random(2300, 4100));
tone(9, 1047, 300);
}
} else if(appl == 3) {
tft.setFont(&makoSmall);
tft.setCursor(3, 8);
tft.print("Sprint");
tft.drawLine(3, 49, 123, 49, WHITE);
tft.setCursor(15, 60);
tft.print("Start");
tft.setCursor(100, 60);
tft.print("Back");
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
m1 = 0; m2 = 0; s1 = 0; s2 = 0; s = 0;
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
} else if(appl == 4) {
tft.setFont(&makoSmall);
tft.setCursor(3, 8);
tft.print("Lap");
tft.drawLine(3, 49, 123, 49, WHITE);
tft.drawLine(74, 3, 74, 46, WHITE);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
tft.setCursor(100, 60);
tft.print("Back");
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
m1 = 0; m2 = 0; s1 = 0; s2 = 0; s = 0;
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
tme = true;
times = 0;
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 523, 150);
delay(random(1800, 3500));
tone(9, 523, 150);
delay(random(2300, 4100));
tone(9, 1047, 300);
}
} else if(appl == 5) {
tft.setFont(&makoSmall);
tft.setCursor(3, 8);
tft.print("Lap");
tft.drawLine(3, 49, 123, 49, WHITE);
tft.drawLine(74, 3, 74, 46, WHITE);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
tft.setCursor(100, 60);
tft.print("Back");
tft.setCursor(3, 36);
tft.print("Sel to Start");
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
m1 = 0; m2 = 0; s1 = 0; s2 = 0; s = 0;
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
tme = false;
done = false;
times = 0;
} else if(appl == 6) {
tft.setFont(&makoSmall);
tft.setCursor(3, 8);
tft.print("Current");
tft.setCursor(3, 40);
tft.print("Last");
int x, y;
int16_t x1, y1;
uint16_t w, h;
tft.getTextBounds("Lane", x, y, &x1, &y1, &w, &h);
tft.setCursor(124 - w, 8);
tft.print("Lane");
tft.getTextBounds("Num", x, y, &x1, &y1, &w, &h);
tft.setCursor(124 - w, 40);
tft.print("Num");
tft.setFont(&nunitoTiny);
tft.setCursor(3, 26);
m1 = 0; m2 = 0; s1 = 0; s2 = 0; s = 0;
tft.setCursor(3, 58);
tft.print("No Data");
tft.setCursor(116, 26);
tft.print(EEPROM.read(1));
tft.getTextBounds("0", x, y, &x1, &y1, &w, &h);
tft.setCursor(124 - w, 58);
tft.print("0");
tft.display();
tme = false;
done = false;
amt = 0;
} else if(appl == 8) {
tme = false;
tft.setFont(&makoSmall);
tft.setCursor(46, 18);
tft.print("Distance");
tft.setCursor(46, 29);
tft.print("Sound");
tft.setCursor(46, 40);
tft.print("Lane Calib");
tft.setCursor(46, 51);
tft.print("Back");
} else if(appl == 9) {
tme = false;
tft.setFont(&makoSmall);
tft.setCursor(7, 25);
tft.print("Select Lane");
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
tft.setCursor(100, 60);
tft.print("Back");
tft.setFont(&nunitoTiny);
tft.setCursor(7, 45);
tft.print(EEPROM.read(1));
}
tft.display();
}
void drawMenu(int app, int item) {
if(app == 0) {
tft.fillRect(0, 0, 43, 64, BLACK);
tft.drawLine(33, 0, 33, 63, WHITE);
if(item == 0) {
tft.drawLine(33, 12, 33, 18, BLACK);
tft.drawLine(33, 11, 37, 15, WHITE);
tft.drawLine(37, 15, 33, 19, WHITE);
tft.drawBitmap(8, 24, sprint, 16, 16, WHITE);
} else if(item == 1) {
tft.drawLine(33, 23, 33, 29, BLACK);
tft.drawLine(33, 22, 37, 26, WHITE);
tft.drawLine(37, 26, 33, 30, WHITE);
tft.drawBitmap(8, 24, lap, 16, 16, WHITE);
} else if(item == 2) {
tft.drawLine(33, 34, 33, 40, BLACK);
tft.drawLine(33, 33, 37, 37, WHITE);
tft.drawLine(37, 37, 33, 41, WHITE);
tft.drawBitmap(8, 24, count, 16, 16, WHITE);
} else if(item == 3) {
tft.drawLine(33, 45, 33, 51, BLACK);
tft.drawLine(33, 44, 37, 48, WHITE);
tft.drawLine(37, 48, 33, 52, WHITE);
tft.drawBitmap(8, 24, settings, 16, 16, WHITE);
}
} else if(app == 1) {
tft.fillRect(0, 0, 43, 64, BLACK);
tft.drawLine(33, 0, 33, 63, WHITE);
if(item == 0) {
tft.drawLine(33, 13, 33, 19, BLACK);
tft.drawLine(33, 12, 37, 16, WHITE);
tft.drawLine(37, 16, 33, 20, WHITE);
tft.drawBitmap(8, 24, autos, 16, 16, WHITE);
} else if(item == 1) {
tft.drawLine(33, 29, 33, 35, BLACK);
tft.drawLine(33, 28, 37, 32, WHITE);
tft.drawLine(37, 32, 33, 36, WHITE);
tft.drawBitmap(8, 24, manual, 16, 16, WHITE);
} else if(item == 2) {
tft.drawLine(33, 45, 33, 51, BLACK);
tft.drawLine(33, 44, 37, 48, WHITE);
tft.drawLine(37, 48, 33, 52, WHITE);
tft.drawBitmap(8, 24, back, 16, 16, WHITE);
}
} else if(app == 3) {
if(item == 0) {
tft.fillRect(87, 53, 7, 10, BLACK);
tft.drawLine(3, 54, 6, 57, WHITE);
tft.drawLine(6, 57, 3, 60, WHITE);
} else if(item == 1) {
tft.fillRect(0, 53, 7, 10, BLACK);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
}
} else if(app == 5) {
if(item == 0) {
tft.fillRect(87, 53, 7, 10, BLACK);
tft.drawLine(3, 54, 6, 57, WHITE);
tft.drawLine(6, 57, 3, 60, WHITE);
} else if(item == 1) {
tft.fillRect(0, 53, 7, 10, BLACK);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
}
} else if(app == 7) {
if(item == 0) {
tft.fillRect(87, 53, 7, 10, BLACK);
tft.drawLine(3, 54, 6, 57, WHITE);
tft.drawLine(6, 57, 3, 60, WHITE);
} else if(item == 1) {
tft.fillRect(0, 53, 7, 10, BLACK);
tft.drawLine(88, 54, 91, 57, WHITE);
tft.drawLine(91, 57, 88, 60, WHITE);
}
} else if(app == 8) {
tft.fillRect(0, 0, 43, 64, BLACK);
tft.drawLine(33, 0, 33, 63, WHITE);
if(item == 0) {
tft.drawLine(33, 12, 33, 18, BLACK);
tft.drawLine(33, 11, 37, 15, WHITE);
tft.drawLine(37, 15, 33, 19, WHITE);
tft.drawBitmap(8, 24, dist, 16, 16, WHITE);
} else if(item == 1) {
tft.drawLine(33, 23, 33, 29, BLACK);
tft.drawLine(33, 22, 37, 26, WHITE);
tft.drawLine(37, 26, 33, 30, WHITE);
if(EEPROM.read(0) == 0) {
tft.drawBitmap(8, 24, sound, 16, 16, WHITE);
} else {
tft.drawBitmap(8, 24, nosound, 16, 16, WHITE);
}
} else if(item == 2) {
tft.drawLine(33, 34, 33, 40, BLACK);
tft.drawLine(33, 33, 37, 37, WHITE);
tft.drawLine(37, 37, 33, 41, WHITE);
tft.drawBitmap(8, 24, racecal, 16, 16, WHITE);
} else if(item == 3) {
tft.drawLine(33, 45, 33, 51, BLACK);
tft.drawLine(33, 44, 37, 48, WHITE);
tft.drawLine(37, 48, 33, 52, WHITE);
tft.drawBitmap(8, 24, back, 16, 16, WHITE);
}
}
tft.display();
}
void events(int button) {
if(app == 0) {
if(button == 0) {
if(menu != 0) {
menu = menu - 1;
drawMenu(app, menu);
}
} else if(button == 1) {
if(menu != 3) {
menu++;
drawMenu(app, menu);
}
} else if(button == 2) {
if(menu == 0) {
app = 1;
mode = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
} else if(menu == 1) {
app = 1;
mode = 1;
menu = 0;
drawApp(app);
drawMenu(app, menu);
} else if(menu == 2) {
app = 6;
drawApp(app);
} else if(menu == 3) {
app = 8;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 1) {
if(button == 0) {
if(menu != 0) {
menu = menu - 1;
drawMenu(app, menu);
}
} else if(button == 1) {
if(menu != 2) {
menu++;
drawMenu(app, menu);
}
} else if(button == 2) {
if(menu == 0) {
if(mode == 0) {
app = 2;
menu = 0;
radio.flush_rx();
drawApp(app);
drawMenu(app, menu);
} else if(mode == 1) {
app = 4;
menu = 0;
radio.flush_rx();
drawApp(app);
drawMenu(app, menu);
} else if(mode == 2) {
app = 6;
menu = 0;
radio.flush_rx();
drawApp(app);
drawMenu(app, menu);
}
} else if(menu == 1) {
if(mode == 0) {
app = 3;
menu = 0;
drawApp(app);
drawMenu(app, menu);
} else if(mode == 1) {
app = 5;
menu = 0;
drawApp(app);
drawMenu(app, menu);
} else if(mode == 2) {
app = 7;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
} else if(menu == 2) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 2) {
if(button == 2) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
} else if(app == 3) {
if(button == 0) {
if(menu == 0)
menu = 1;
else
menu = 0;
drawMenu(app, menu);
} else if(button == 1) {
if(menu == 0)
menu = 1;
else
menu = 0;
drawMenu(app, menu);
} else if(button == 2) {
if(menu == 0) {
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 1047, 300);
}
tme = true;
} else if(menu == 1) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 4) {
if(button == 2) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
} else if(app == 5) {
if(button == 0) {
} else if(button == 1) {
if(done == false) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
} else if(button == 2) {
if(done == false) {
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 523, 150);
delay(random(1800, 3500));
tone(9, 523, 150);
delay(random(2300, 4100));
tone(9, 1047, 300);
}
tme = true;
} else if(menu == 1) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 6) {
if(button == 2) {
if(done == false) {
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 1047, 300);
}
tme = true;
done = true;
} else if(done == true) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 7) {
if(button == 0) {
} else if(button == 1) {
if(done == false) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
} else if(button == 2) {
if(done == false) {
delay(100);
if(EEPROM.read(0) == 0) {
tone(9, 523, 150);
delay(random(1800, 3500));
tone(9, 523, 150);
delay(random(2300, 4100));
tone(9, 1047, 300);
}
tme = true;
} else if(menu == 1) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 8) {
if(button == 0) {
if(menu != 0) {
menu = menu - 1;
drawMenu(app, menu);
}
} else if(button == 1) {
if(menu != 3) {
menu++;
drawMenu(app, menu);
}
} else if(button == 2) {
if(menu == 0) {
app = 9;
drawApp(9);
} else if(menu == 1) {
if(EEPROM.read(0) == 0) {
EEPROM.write(0, 1);
tft.fillRect(8, 24, 16, 16, BLACK);
tft.drawBitmap(8, 24, nosound, 16, 16, WHITE);
} else {
EEPROM.write(0, 0);
tft.fillRect(8, 24, 16, 16, BLACK);
tft.drawBitmap(8, 24, sound, 16, 16, WHITE);
}
tft.display();
} else if(menu == 2) {
} else if(menu == 3) {
app = 0;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
} else if(app == 9) {
if(button == 0) {
if(EEPROM.read(1) != 8) {
EEPROM.write(1, EEPROM.read(1) + 1);
tft.fillRect(6, 32, 20, 20, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(7, 45);
tft.print(EEPROM.read(1));
tft.display();
}
} else if(button == 1) {
if(EEPROM.read(1) != 1) {
EEPROM.write(1, EEPROM.read(1) - 1);
tft.fillRect(6, 32, 20, 20, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(7, 45);
tft.print(EEPROM.read(1));
tft.display();
}
} else if(button == 2) {
app = 8;
menu = 0;
drawApp(app);
drawMenu(app, menu);
}
}
}
void getTime() {
if(s == 9) {
s = 0;
s2++;
if(s2 > 9) {
s2 = 0;
s1++;
if(s1 > 5) {
s1 = 0;
m2++;
if(m2 > 9) {
m2 = 0;
m1++;
if(m1 > 9) {
m1 = 0;
}
}
}
}
} else {
s++;
}
}
boolean hasData() {
if(radio.available()) {
int distance;
radio.read(&distance, sizeof(distance));
if(distance < (EEPROM.read(1) * 100)) {
return true;
}
}
return false;
}
void loop() {
up = digitalRead(16);
down = digitalRead(15);
select = digitalRead(14);
if(up == HIGH && pressed == -1) {
pressed = 0;
events(0);
} else if(down == HIGH && pressed == -1) {
pressed = 1;
events(1);
} else if(select == HIGH && pressed == -1) {
pressed = 2;
events(2);
}
if(up == LOW) {
if(pressed == 0)
pressed = -1;
}
if(down == LOW) {
if(pressed == 1)
pressed = -1;
}
if(select == LOW) {
if(pressed == 2)
pressed = -1;
}
if(app == 2) {
if(hasData()) {
int text;
radio.read(&text, sizeof(text));
tme = false;
} else {
curr = millis();
}
if(curr - prev >= interval && tme == true) {
prev = curr;
getTime();
delay(10);
}
tft.fillRect(0, 16, 72, 13, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
} else if(app == 3) {
if(hasData()) {
int text;
radio.read(&text, sizeof(text));
tme = false;
} else {
if(tme == true)
curr = millis();
}
if(curr - prev >= interval && tme == true) {
prev = curr;
getTime();
delay(10);
}
tft.fillRect(0, 16, 72, 13, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
} else if(app == 4) {
if(hasData() && last > 10) {
int text;
radio.read(&text, sizeof(text));
if(times < 4) {
tft.setFont(&makoSmall);
tft.setCursor(84, 12 + (times * 10));
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
mm1 = m1; mm2 = m2; ss1 = s1; ss2 = s2; ss = s;
times++;
last = 0;
curr = millis();
if(times == 4) {
tme = false;
}
}
} else if(hasData()) {
int text;
radio.read(&text, sizeof(text));
curr = millis();
} else {
curr = millis();
}
if(curr - prev >= interval && tme == true) {
prev = curr;
getTime();
last++;
}
tft.fillRect(0, 16, 72, 13, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(3, 28);
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
} else if(app == 6) {
if(hasData() && last >= 5) {
int text;
radio.read(&text, sizeof(text));
tft.setFont(&nunitoTiny);
tft.fillRect(0, 46, 128, 13, BLACK);
tft.setCursor(3, 58);
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
mm1 = m1; mm2 = m2; ss1 = s1; ss2 = s2; ss = s;
last = 0;
curr = millis();
amt++;
int x, y;
int16_t x1, y1;
uint16_t w, h;
tft.getTextBounds(String(amt), x, y, &x1, &y1, &w, &h);
tft.setCursor(124 - w, 58);
tft.print(String(amt));
//Serial.println("Runner " + String(amt) + ": " + String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
} else if(hasData()) {
int text;
radio.read(&text, sizeof(text));
curr = millis();
} else {
curr = millis();
}
if(curr - prev >= interval && tme == true) {
prev = curr;
getTime();
last++;
delay(10);
}
tft.fillRect(0, 14, 72, 13, BLACK);
tft.setFont(&nunitoTiny);
tft.setCursor(3, 26);
tft.print(String(m1) + String(m2) + ":" + String(s1) + String(s2) + "." + String(s));
tft.display();
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
Comments