Humans exhibit various constructive character traits, but it'd be foolish to neglect those which are more encumbering such as stealing. Stealing happens all the time and it can even occur domestically. Whether you've got a shady roommate or a child in high school experimenting with your liquor, it's a good idea to confront them. Rather than accusing them immediately, try gathering some undeniable proof of their actions in the form of a digital picture. Coady-Ward offers you an affordable security camera that can discretely capture an image of whoever it is that's taking your belongings.
How it works:
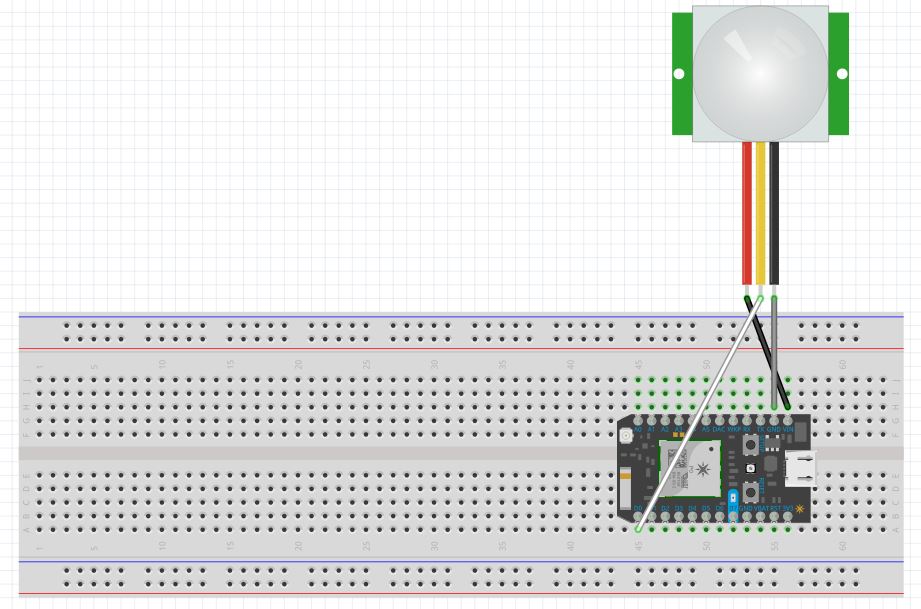
The system developed by Coady-Ward utilizes communication between two Particle Photons. One of the photons is placed on a breadboard with a PIR sensor. The other photon is placed on a separate breadboard with a servo motor. The servo motor is arranged such that it can reach the capture button on a digital camera. As soon as the photons receive power, the LED (D7) will light up on the particle connected to the PIR sensor ensuring that everything is working properly. Whenever the PIR sensor detects motion, it sends a message which triggers the servo motor and, ultimately, a picture to be taken. Once a picture is taken, a message is sent to either your phone or email alerting you that your belongings have been tampered with.
Moving forward:
This security camera is still in the prototype stage. In the future, there won't be any need for batteries or even a camera as big as the one we used. The camera will eventually be one unit which detects motion from within the camera and much smaller to avoid being noticed.
Prototype:
Camera takes a picture once the cabinet is open for 3 seconds.
Servomyservo;// create servo object to control a servo// a maximum of eight servo objects can be createdintpos=0;// variable to store the servo positionvoidloop(){Particle.publish("connected","go");}voidsetup(){Particle.subscribe("cabinet_open",snap_pic);myservo.attach(D0);// attach the servo on the D0 pin to the servo objectmyservo.write(25);// test the servo by moving it to 25°pinMode(D7,OUTPUT);// set D7 as an output so we can flash the onboard LED}intsnap_pic(constchar*event,constchar*data){if(strcmp(data,"open")==0){myservo.write(40);// move servo to 40° - ding!digitalWrite(D7,HIGH);// flash the LED (as an indicator)delay(100);// wait 100 msmyservo.write(25);// move servo to 25°digitalWrite(D7,LOW);// turn off LEDreturn1;// return a status of "1"}else{}}
PIR Sensor
C/C++
intledPin=D7;// choose the pin for the LEDintinputPin=D0;// choose the PIR sensor pinboolclosed;// status of cabinetintmotionCounter=0;// variable to count motion eventsTimertimer(3000,determineMotion);// software timer to check every 3svoidsetup(){pinMode(ledPin,OUTPUT);// set LED as outputpinMode(inputPin,INPUT);// set sensor as inputParticle.subscribe("connected",lightOn);//looks for partner's photontimer.start();// start the determineMotion timer}voiddetermineMotion(){// this function determines if there's motionif(motionCounter<2){// if very little motion was detectedif(closed==false){// only publish if the status changed}closed=true;// set the status to closed}elseif(motionCounter>=2){if(closed==true){// only publish if the status changedParticle.publish("cabinet_open","open");}closed=false;// set the status to open}motionCounter=0;// reset motion counter}intlightOn(constchar*event,constchar*data)//funtion notifies when partner's photon is ready{if(strcmp(data,"go")==0){digitalWrite(ledPin,HIGH);// turn LED ON delay(5000);// Wait 5sdigitalWrite(ledPin,LOW);// turn off LED}else{}}voidloop(){if(digitalRead(inputPin)==HIGH){// check if the input is HIGHmotionCounter++;// increment motion counter}else{}delay(500);// wait 0.5s}










_MSDApVVuAr.JPG)
_PvFi65sMhA.JPG)




{kind=link}
_MSDApVVuAr.JPG){kind=link}
{kind=link}
_PvFi65sMhA.JPG){kind=link}
Comments