To realise the promises of drone use we need to make their deployment and recovery as straightforward as possible and provide as much relevant information to the drone as is needed to make a safe automated landing.
Local weather, aircraft information, differential GPS, and METAR data are just some of the things that need to be handled in the cloud and in an edge node where they can be accessed by the outgoing or incoming drone as effectively as possible.
A dedicated node to handle these aspects and the local connection from the drone to the cloud is a great starting point for further development.
Open source of course ;-) Can't scale if we can't collaborate.
A local node to coordinate a drone in the local environment and allow mission supervision over the internet will need a number of features.
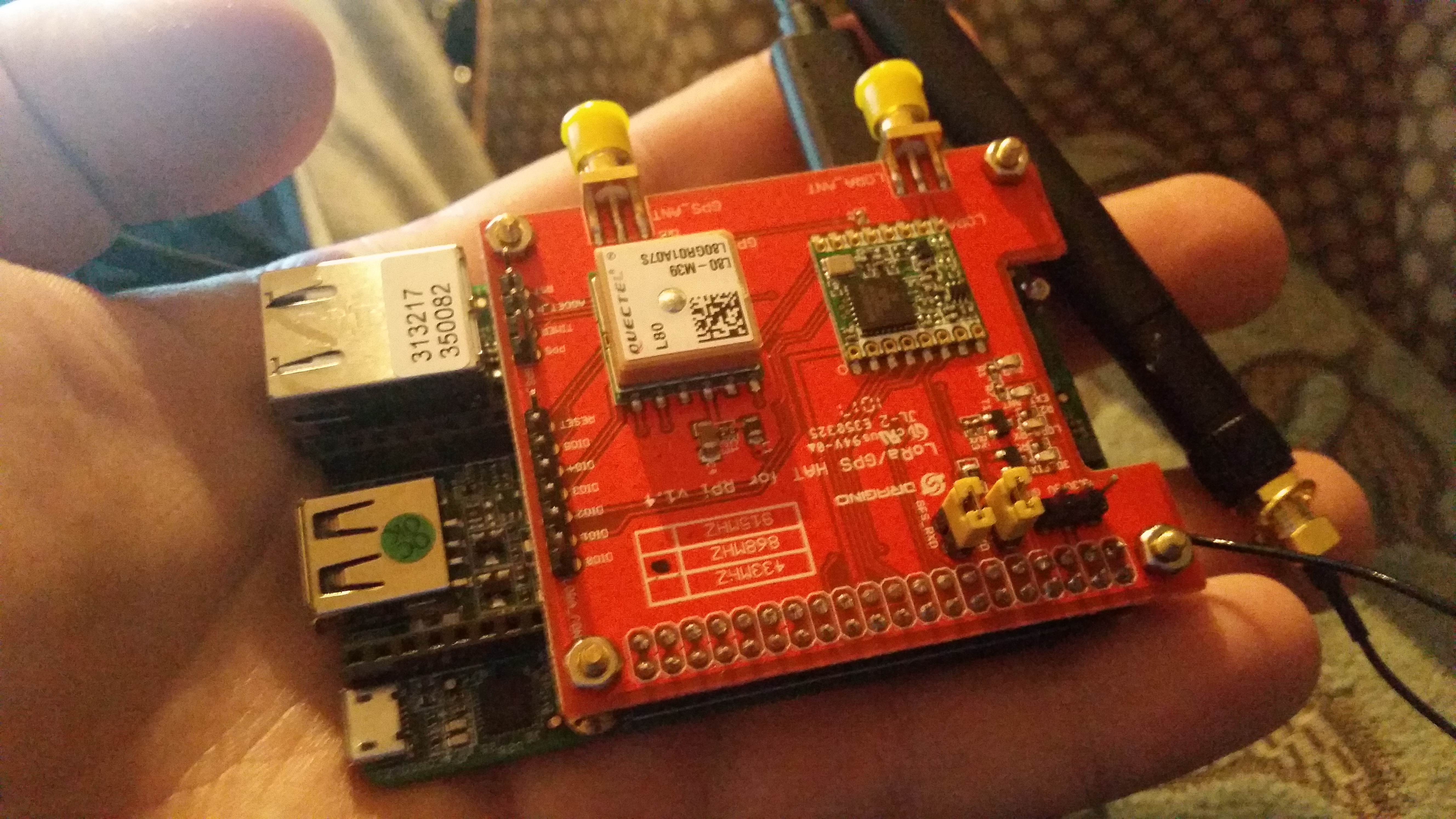
- Communicate with the drone. Here we use a 433Mhz modem which can receive telemetry from the PixHawk flight controller and update the mission in flight as well as perform pre and post flight activities.
- Communicate with the cloud. Here we use a cellular modem to report status and interface with a server which can coordinate multiple drone/gcs worker combinations.
- Discover other drone/gcs teams in the local area. LoRa is the mode chosen here as it is low power, long range, and suitable for communicating publicly and announcing the presence of the teams in the area long with intent.











{kind=link}
Comments