

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
It's tough losing weight. One day you weigh a pound more and you feel hopeless. The next day you weigh a pound less and everything is awesome!
So it's hard to track your progress without historical data, and a convenient way to capture the data.
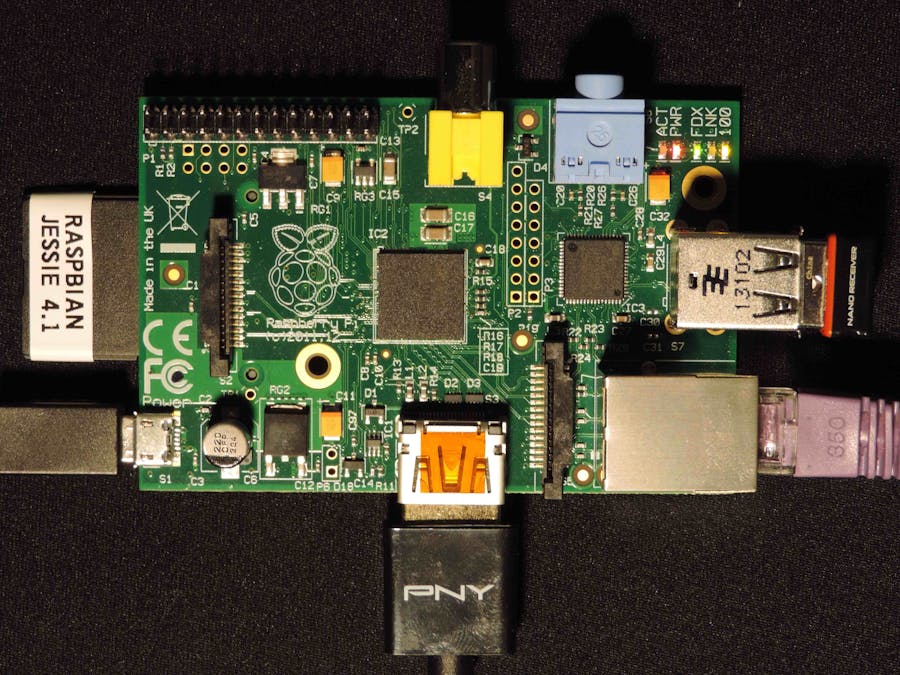
Wii Balance Board Cloud Scale basically uses a Wii Balance Board over a Bluetooth connection to a Raspberry Pi. The Raspberry Pi uploads data to AWS every time you step on the scale.
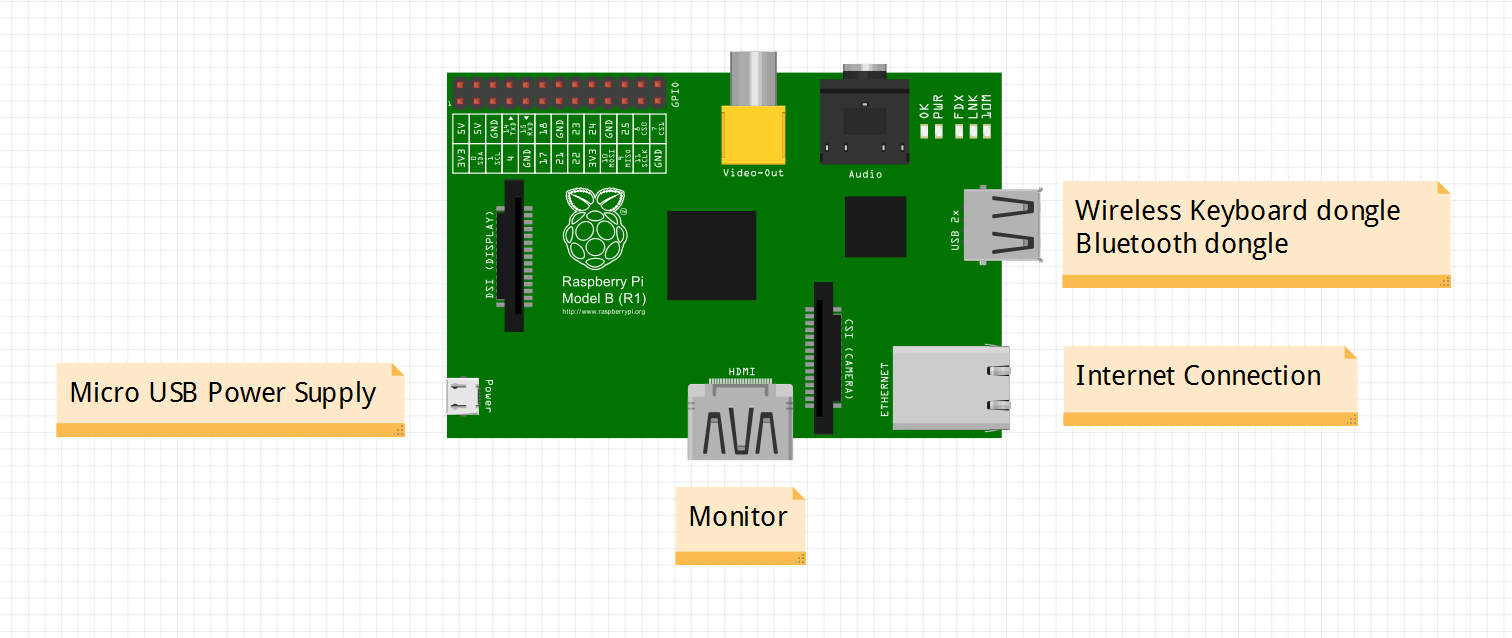
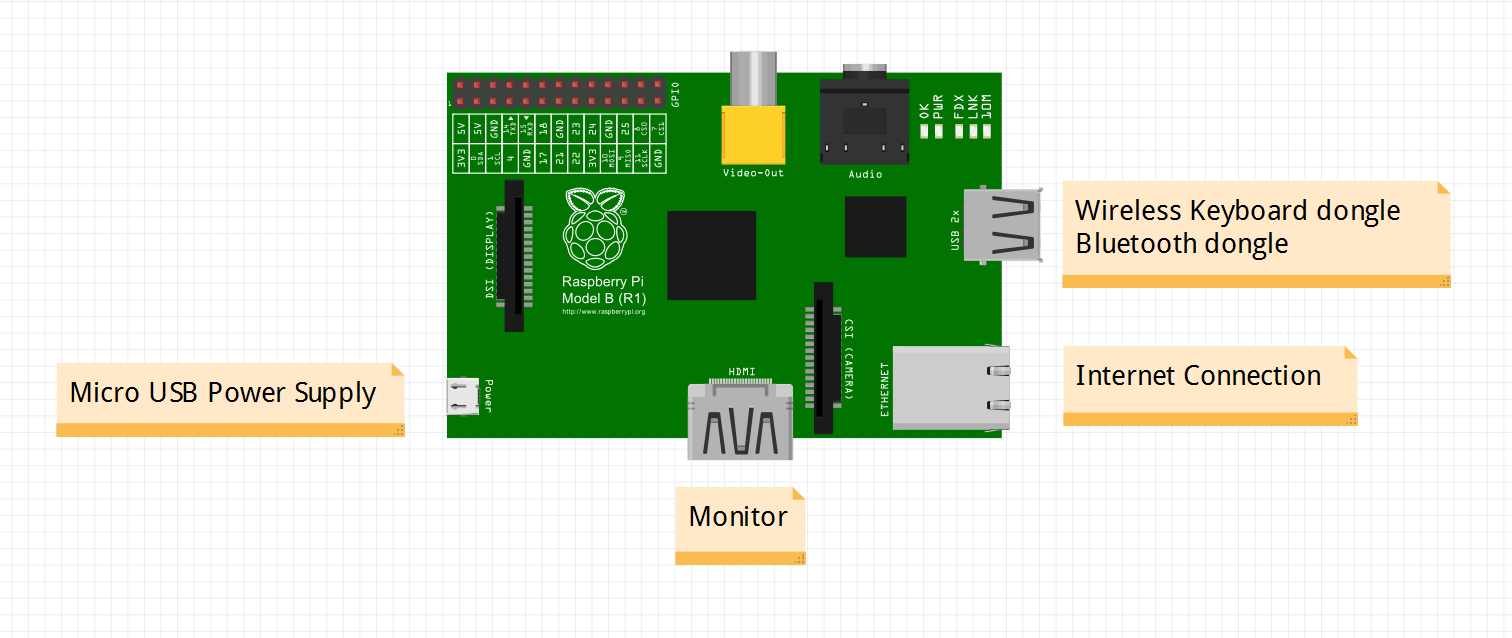
Setting Up the Raspberry PiThis project uses the Raspberry Pi Model B. This was one of the original Pis and needs some updating to correct glitches like repeating keys. This page will help you identify your Raspberry Pi. You also may need to troubleshoot your Pi, or take screenshots.
First you will need to download an image of Raspbian Jessie 4.1 and burn it onto an SD card (I used an 8Gb SD card to be safe). The links above provide easy-to-follow instructions.
Next you will want to resize your filesystem to use all of the available space on your SD card:
sudo raspi-config
Reboot!
Check free space:
df -h
(from http://makezine.com/projects/create-raspberry-pi-smart-beer-fridge/)
• Plug your Bluetooth adapter into your Pi and install the required libraries at your Pi’s command line terminal:
$ sudo apt-get install python-bluetooth bluez python-gobject
• Reboot! (you will have to plug in your bluetooth dongle and reboot)
• You can see the address of your bluetooth dongle with the "hcitool dev" command:
$ hcitool dev
Devices:
hci0 00:1A:7D:DA:71:13
• We are now ready to connect and communicate with the Wii Balance Board. We will do this by using a modified version of Stavros Korokithakis' Gr8W8Upd8M8.py script.
• Copy the wiiboard_test.py script to a file on your Pi and run it.
$ sudo python wiiboard_test.py
• You will see the following response:
Discovering board...
Press the red sync button on the board now
• Remove the battery cover underneath the Board to locate the red sync button and press it. You will see something similar to the following:
Found Wiiboard at address
00:23:CC:2E:E1:44
Trying to connect...
Connected to Wiiboard at address
00:23:CC:2E:E1:44
Wiiboard connected
ACK to data write received
84.9185297 lbs
84.8826412 lbs
84.9275927 lbs
• Your Wii Balance Board is now a scale. Press CTRL+C to stop the script.
Enter the following commands to install IceWeasel:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install iceweasel
Answer with a positive response if asked about authorization. With both the 'upgrade' and 'install' steps, answer "Y" when asked about disk space.
After this sequence, the IceWeasel browser should be installed on your computer. It can be activated from the system menu "Internet -> IceWeasel".
This browser should look familiar to you if you are a Firefox user on other systems. All dialogs and features are similar or the same as with Firefox. Many plugins will work on both IceWeasel and Firefox.
Set up your AWS AccountThis is best described by Amazon.
Start here. You can sign-in with your existing Amazon User ID and Password if you already have one.
At this point you will need to change your keyboard setting on your Raspberry Pi. Choose:
Raspberry Pi ->Mouse and Keyboard Settings -> United States -> English
You can use Amazon's instructions to set up your account. The guide will walk you through:
- Signing up for an Account
- Creating a Thing
- Generating and Installing Certificates
- Connecting your Device
Make a note of your account details on the Connect A Device page.
This is basically one easy step. More info can be found here.
pip install paho-mqtt
Download the code at the bottom of the article. You need to change the certs path on line #38, the topic name on line #44 and the thing name on line #94.
The script will run indefinitely until Ctrl-C is pressed and upload the weight readings from the Wii every time you step on the scale.
Your output should look something like this:







{kind=link}
Comments