
Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
In this article, I will show you how to use DF Robot’s all-new Light and Motor Driver Module for Python in your project. By using this module you can control the speed of a PMDC motor for the brightness of the LED strip.
I use PMDC most of the time in my small projects because it is cheap and very easy to control. I am going to drive my PMDC motor using this Motor Driver Module.
4 Control ModesThere are 4 Control modes of this module
1. Analogue control mode for potentiometer control mode
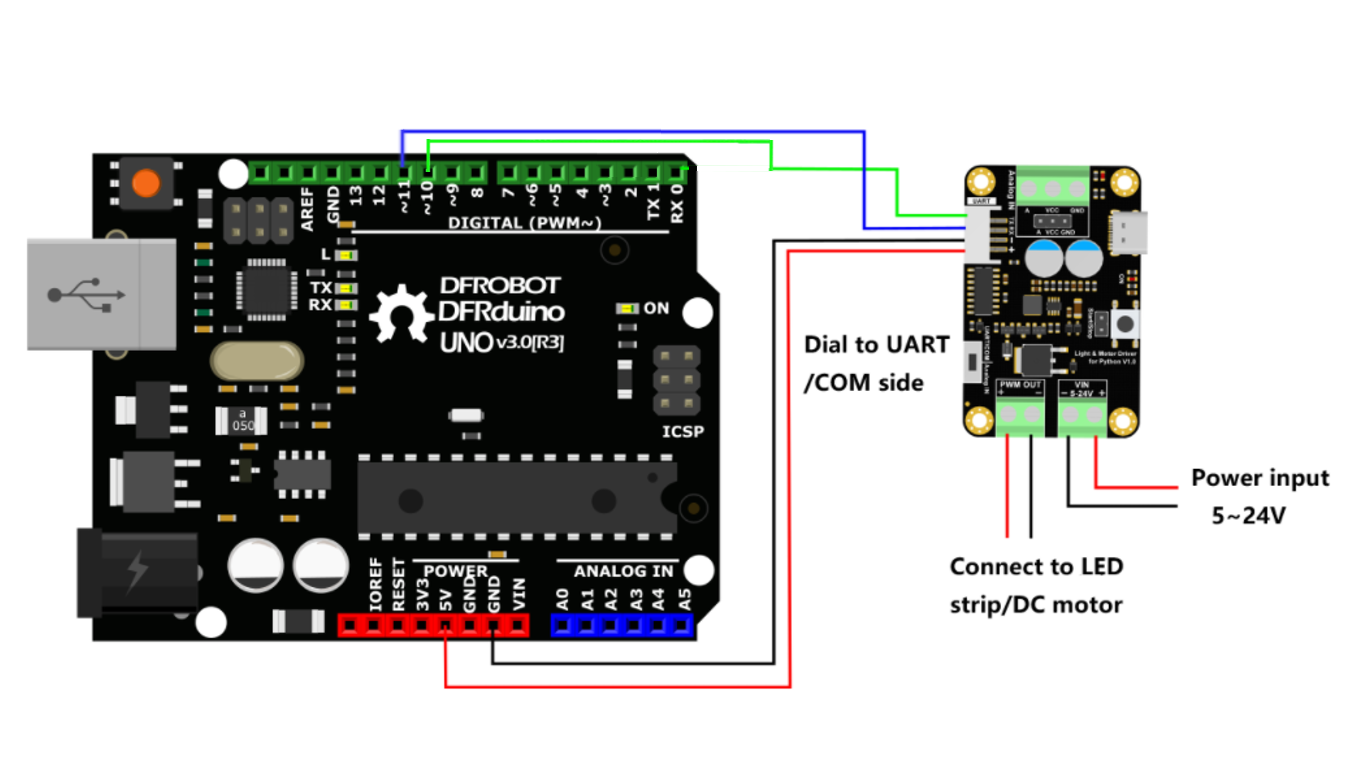
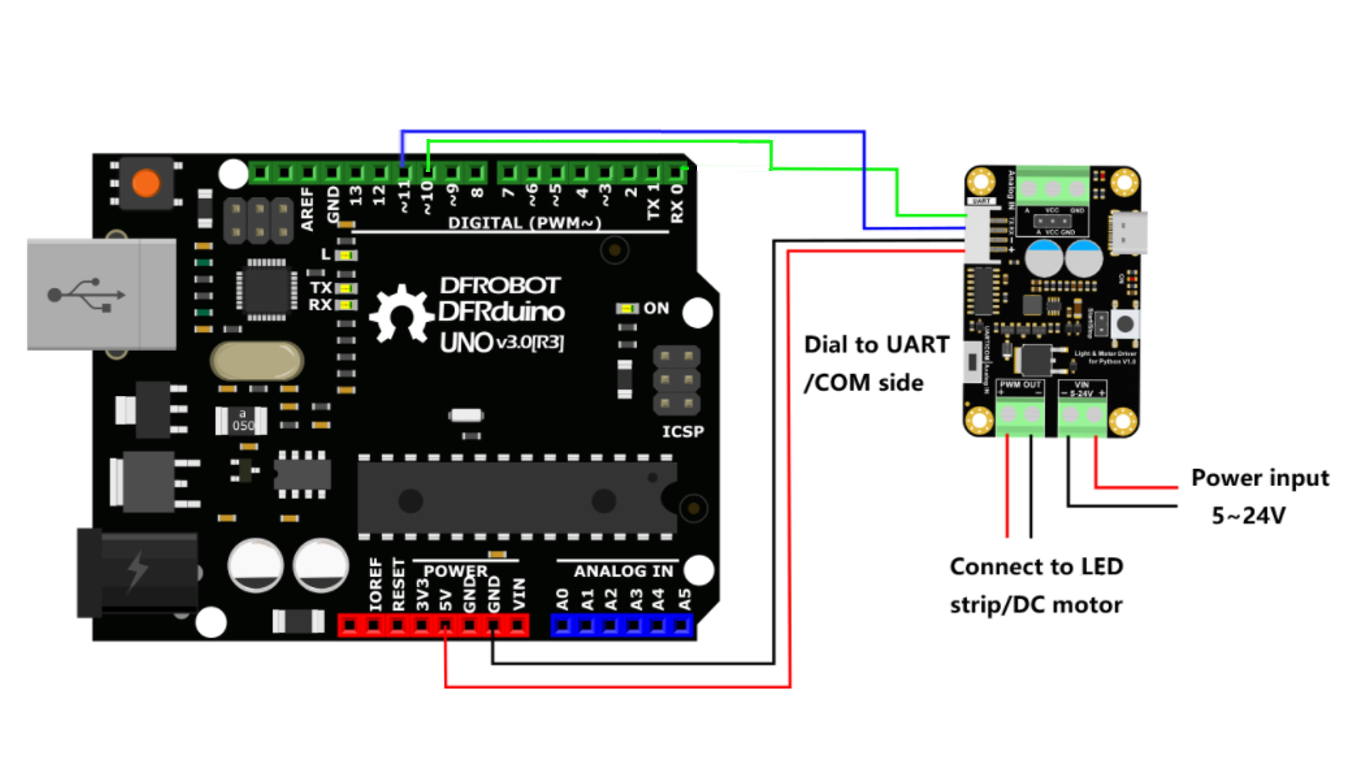
2. UART or serial communication control mode
3. Host PC software control mode
4. Python Programming control
The main advantage of this driver module is the driver can be controlled via PC using Python programming language. So, this board can be used very easily for those project which is based on Python programming.
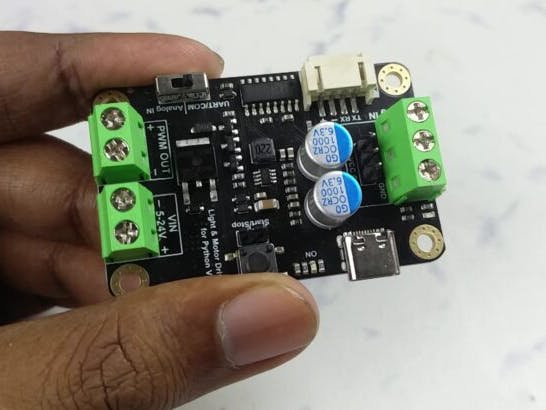
Board DescriptionThis module can be supplied from 5 volts to 24 volts DC. And the onboard motor driving MOSFET can handle 10 ampere current. For connecting the power supply and the motor there is a couple of 2 pin screw connector.
There is an onboard micro switch to start and stop the motor. Along with this switch, a male header is also present for connecting external NO-type push switch for the same purpose.
For controlling the speed of the motor manually here is a 3 pin connector where a potentiometer can be connected.
For your or serial communication purpose a 4 pin JST terminal is used. You will also get a 4 pin JST while purchasing this board. The four pins of this JST terminal are used for 5 volts, Ground, TX, and RX.
If you want to communicate with this motor driver via PC there is a USB C type connector on the board. By using a USB C-type data cable you can connect this board to the PC directly. For changing the driving mode is light switch is soldered on the right side of the JST terminal. To put this board into the analog control mode you have to slide the switch in the analog position and for the other three modes f to slide this switch in the communication position.
You can read the original article here
You can check the video tutorial here



{kind=link}
{kind=link}
Comments