// This is a water pump and tank monitoring, controlling and record circuit by ChihNan Chuang written
// Most functions were from open or Arduino examples using Arduino MEGA 2560 board
// ,Arduino,MEGA 2560
// AT version: 1.1.0.0(May 11 2016)
//
// < hall-effect flow sensor outputs approximately >
// FS400A-G1 4.8 pulses per second (per litre/minute of flow).
// FS400A-G3/4 6.0 pulses per second (per litre/minute of flow).
//
// < HC-SR04 >
// 3mm, 2~450cm
// c = 331.5 + 0.607 * t ( t )
// 20 331.5 + 0.607*20 = 343.64 /
// / /343.64 * 100 / 1000000 = 0.034364 /
// 29.1 1 / 0.034364 = 29.1 /
// = /2 , 29.1 /
//
// < Micro SD card module for Mega 2560 >
// DIO pin 50: MISO
// DIO pin 51: MOSI
// DIO pin 52: SCK
// DIO pin 53: CS
// Vcc: 3.3~5V
// GND: 0V
//
// < Important modification >
// C:\Users\user\AppData\Local\Arduino15\packages\arduino\hardware\avr\1.8.3\cores\arduino\HardwareSerial.h
// Change: __#define SERIAL_TX_BUFFER_SIZE 64
// __#define SERIAL_RX_BUFFER_SIZE 64
// To: __#define SERIAL_TX_BUFFER_SIZE 256
// __#define SERIAL_RX_BUFFER_SIZE 256
//
// < alarm_code >
// 0: ,,
// 1: ,
// 2: ,
// 3: ,
// 4: ,,,
// 5: ,
// 6: ,,
// 7: ?,,
// 8: ,,
// 9: ,,,
// 10: ,,
// 11: ?,,
// 12: ?,,
// 13: ?,,
// 14: ,,;,
// ,,
// 15: ,,;,
// wifi,,
// 16: ,,;,
// 17: ,,;,
// ,,
// 18: 1?cm,
// 19: 1?cm
// 20: 1?cm
// 21: 10cm,
// 22: 2?cm,
// 23: 2?cm
// 24: 2?cm
// 25: 20cm,
// 26: ?/,
// 27: ,,,<>,
//
//
// < warning code(not use yet) >
// 28: ?A,
// 29: ?A,
// *****
#include <SoftwareSerial.h> //
#include "EmonLib.h" //
#include <Wire.h> // I2C/TWI
#include <TimeLib.h> //
#include <DS3231.h> // DS2321 RTC
#include <SPI.h> // SPI
#include <SD.h> // MicroSD card
#define SERVER_PORT 80 // server port
#define BAUDRATE 115200 //
EnergyMonitor emon; // emon
DS3231 rtc(SDA, SCL); // Init the DS3231 using the hardware interface
File myFile; // MicroSD card filename
double Irms; // Irms,
double Irms_tmp; // Irms,
double I01 = 0; // 0
double I02 = 0; // 1
double I03 = 0; // 2
double I1 = 0; // ?
double I2 = 0; // ?
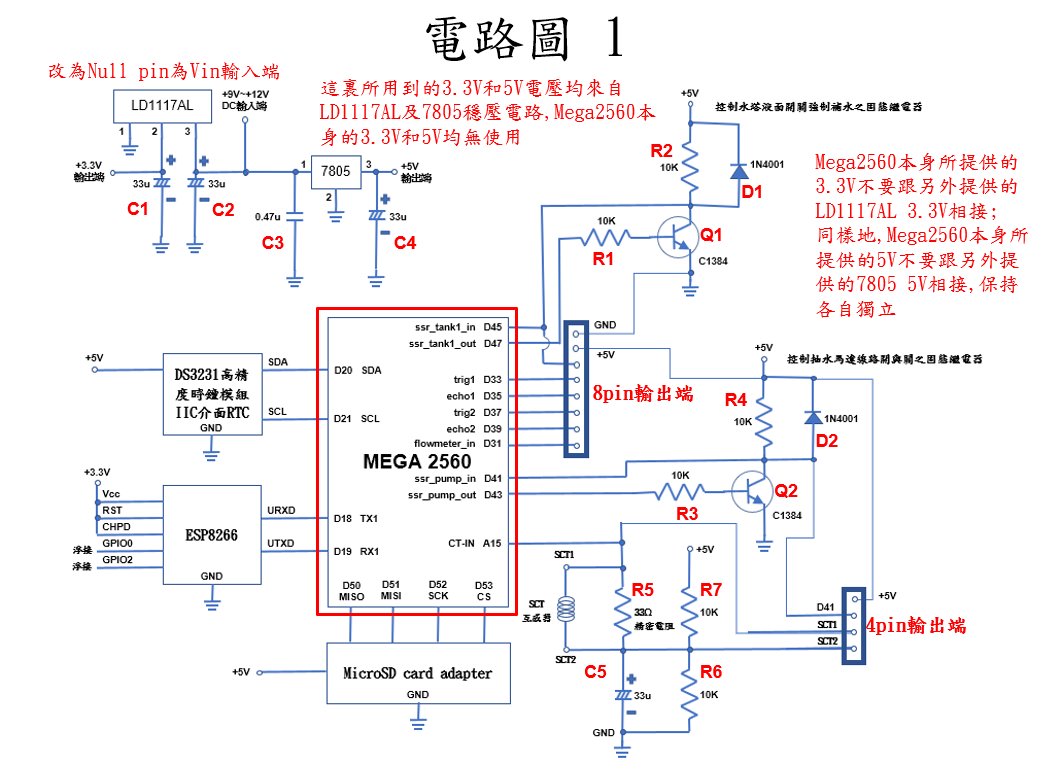
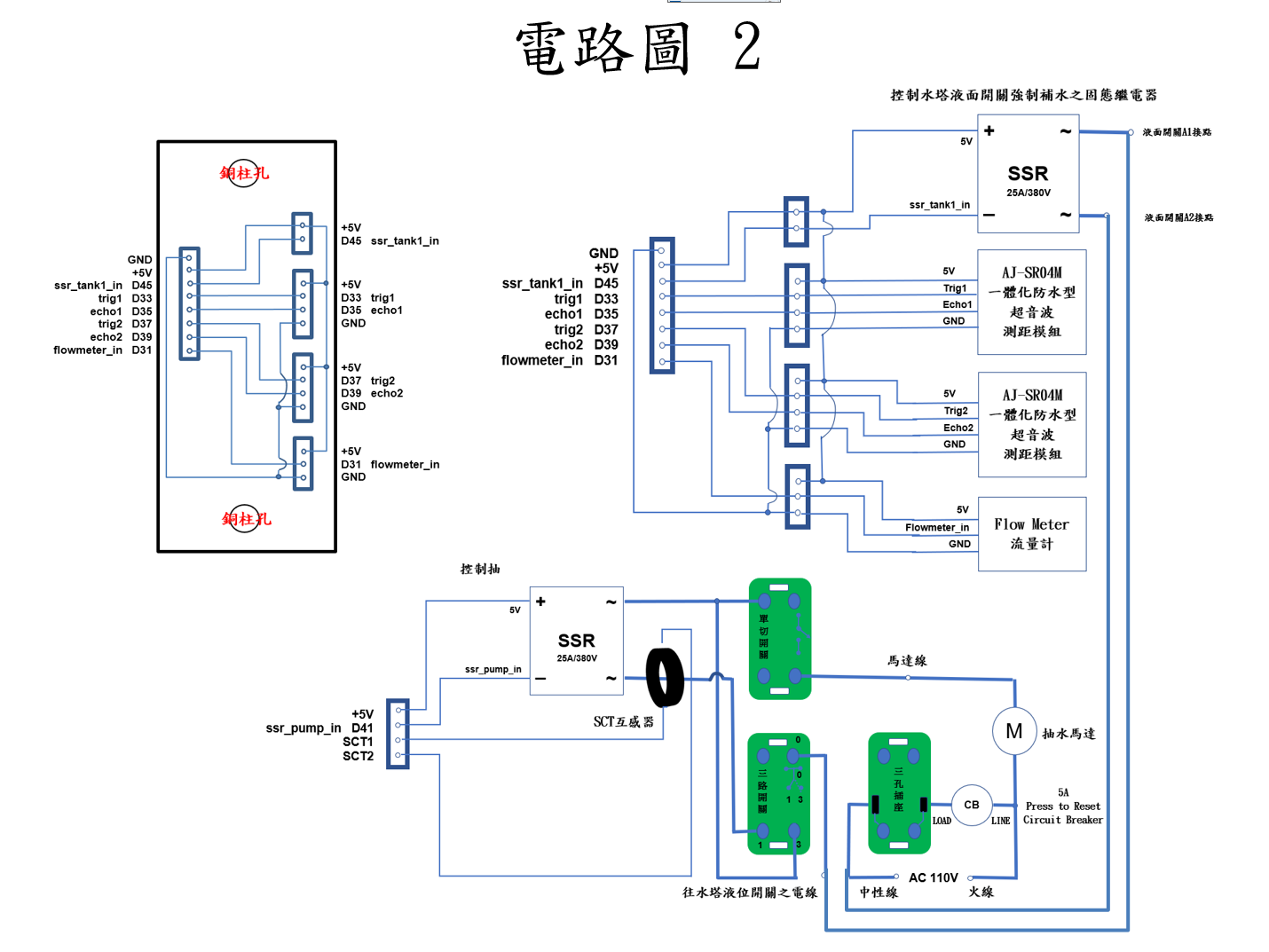
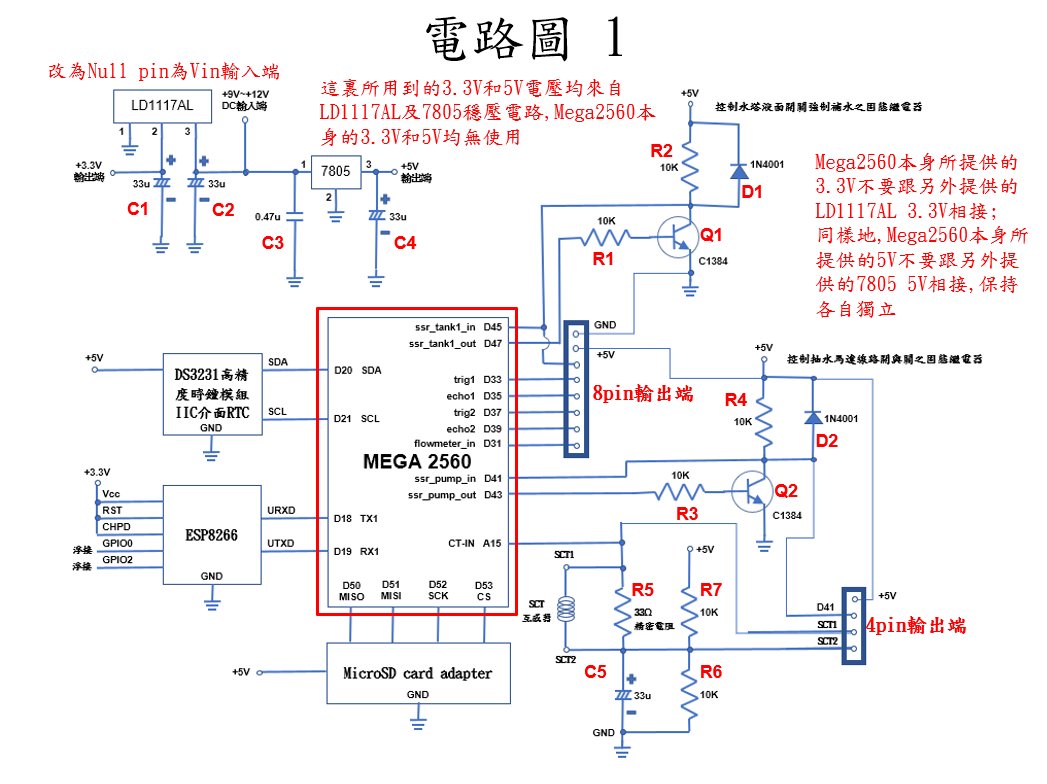
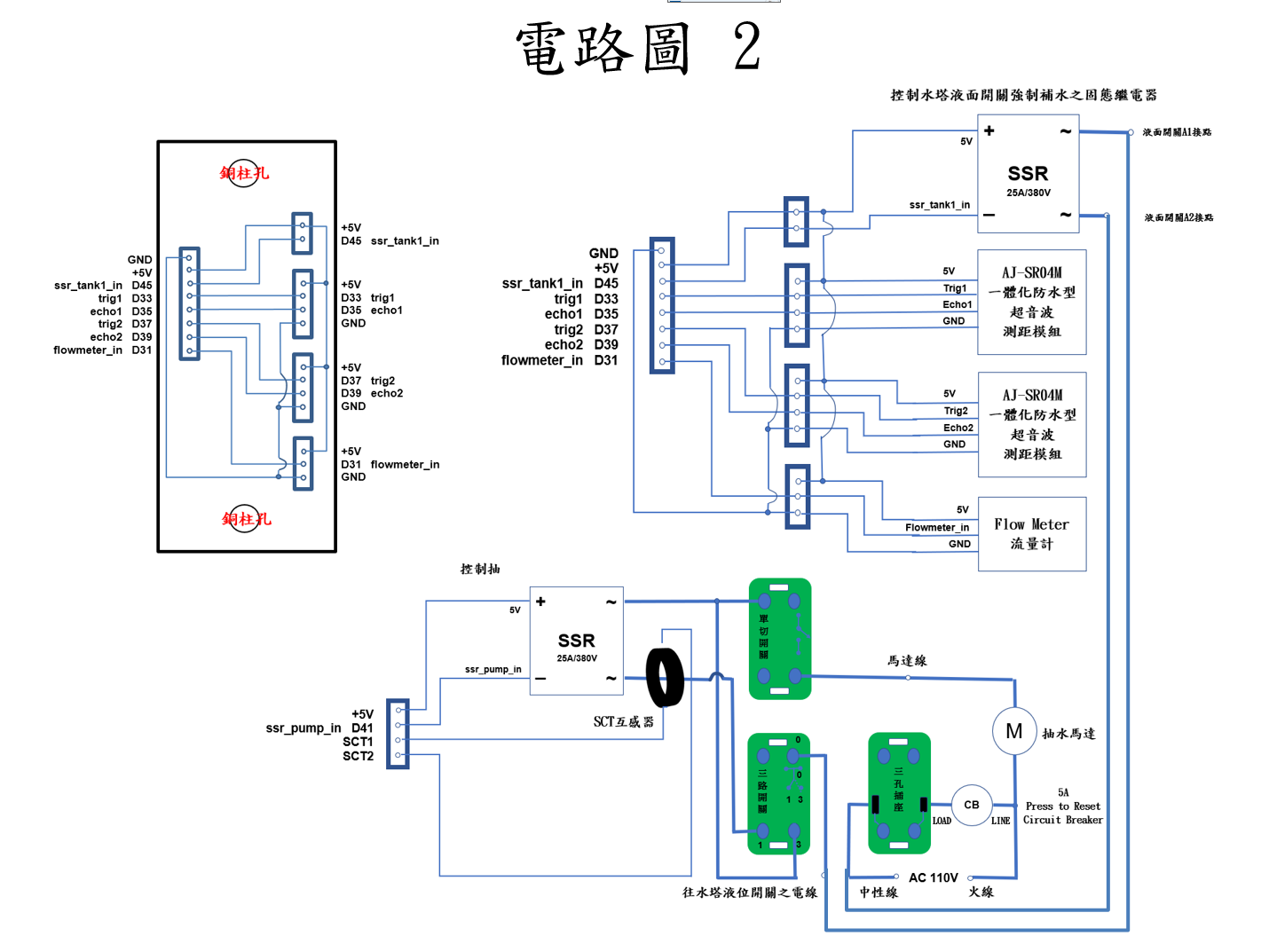
int CT_IN = 15; // A15, CT, Irms
int FLOWMETER_IN = 31; // D31,
int TRIG1_OUT = 33; // D33, 1Trig1
int ECHO1_IN = 35; // D35, 1Echo1
int TRIG2_OUT = 37; // D37, 2Trig2
int ECHO2_IN = 39; // D39, 2Echo2
int SSR_PUMP_IN = 41; // D41,
int SSR_PUMP_OUT = 43; // D43,
int SSR_TANK1_IN = 45; // D45, 1
int SSR_TANK1_OUT = 47; // D47, 1
int CHIPSELECT = 53; // D53, SD cardCS
float CT_FACTOR = 10; // 10
float CURRENT_0 = 0.4; // 0.4,CT (A)
float CURRENT_WATERFLOW = 4.0; // 4.0, (A)
float CURRENT_TOLERANCE = 0.5; // 0.5,, (A)
int PUMP_CURRENT_SHUTDOWN = 5; // 5,(),0
int TANK1_DRUM_HEIGHT = 10; // 120,1 (cm)
int TANK2_DRUM_HEIGHT = 10; // 100,2 (cm)
int TANK1_DRUM_CIRCUMFERENCE = 0; // 351,1 (cm)
int TANK2_DRUM_CIRCUMFERENCE = 0; // 285,2 (cm)
int TANK1_SONIC_TO_0 = 10; // 130,1 (cm)
int TANK2_SONIC_TO_0 = 10; // 110,2 (cm)
int TANK1_MAX_LEVEL = 20; // 95,1max (cm)
int TANK1_MIN_LEVEL = 10; // 77,1min (cm)
int TANK2_MAX_LEVEL = 20; // 54,2max (cm)
int TANK2_MIN_LEVEL = 10; // 36,2min (cm)
int FLOAT_BALL_FAILED = 5; // 5, (cm)
int LEVEL_SENSOR_FAILED = 5; // 5, (cm)
int LOW_FLOW = 8; // 8, (L/min)
int PUMP_WATER_SHUTDOWN = 20; // 20,(),0
float FLOW_METER_FACTOR = 6.00; // 6.00,FS300A G3/4" -> 1 L/min = 5.5 pulse/sec, set 6.00
// 4.60,FS400A G1" -> 1 L/min = 4.8 pulse/sec, set 4.60
int AC_POWER = 110; // 110, (V)
int PUMP_AUTO_SHUTDOWN = 60; // 90, (min)
int ENFORCE_REFILL = 30; // 60,, (min)
boolean first_coming = false; // Arduino1?
boolean FAIL_ESP8266 = true; // ESP8266?
boolean link_status = true; // Wifi?
int CONNECTION_ID; // ID
int wifitimes = 8; // wifi
String esp8266_ap = ""; // ESP8266 AP IP
String esp8266_sta = ""; // ESP8266 STA IP
String account[2]; // [0]home_AP_SSID & [1]home_AP_PASSWORD
String feedback = ""; //
String home_AP_SSID = ""; // esp8266 as STA default
String home_AP_PASSWORD = ""; // esp8266 as STA default
char soft_AP_SSID[] = "WATER_PUMP_0"; // esp8266 as AP default
char soft_AP_PASSWORD[] = "12345678"; // esp8266 as Ap default
char wifi_ap[16]; // AP IP, 16
int average_flow_count = 0; //
float average_flow = 0; //
float total_pipe_flow = 0; // ,
float pipe_flow = 0; //
boolean water_low_alarm = false; // ,false
boolean current_alarm = false; // alarm,false
boolean pump_start_moment = false; // ( -> 0A)
boolean pump_stop_moment = false; // (0A -> )
int current_fault = 0; // alarm? (0) (1) (2)
int water_alarm_min = 0; // x
int water_alarm_sec = 0; // x
int water_alarm_sec_0 = 0; //
int current_alarm_sec = 0; // alarmx
int pump_start_min = 0; // x
int pump_start_sec = 0; // x
int pump_start_sec_0 = 0; //
int total_refill = 0; //
int refill_stop_count = 0; //
float tank1_drum_scale; // 1(/)
float tank2_drum_scale; // 2(/)
float tank1_cm = 0; // 1(cm)
float tank2_cm = 0; // 2(cm)
float tank1_last_height1 = 0; // 1
float tank1_last_height2 = 0; // 1
float tank2_last_height1 = 0; // 2
float tank2_last_height2 = 0; // 2
float tank1_last_height1_pre = 0; // 1
float tank2_last_height1_pre = 0; // 2
String now_time = ""; //
String pump_last_start_time = ""; // ()
int refill_mode = 0; // -> 0: 1:
int ssr_state = 1; // SSR -> (0) (1) (2) (3)
int alarm_code_send = 0; //
int alarm_code_send_last = 0; //
int amper_start = 0; // 1,?
int amper_start_count = 0; // counter
int current_max_count = 60; // ?
int current_pre_count = 33; // ?
int amper[60]; // 0
int pre_amper[33]; // ?0
int pump_max_count = 60; // ?,
String pump_records[60]; // ,xx
int alarm_max_count = 30; // ?
int alarm_code[30]; // ?
String alarm_time[30]; // ?
int wait_tank_ssr_time = 0; // SSR
unsigned long millis_end_time = 4294967295; // millis(),0,4917247.295
unsigned long pump_start; // ,(ms)
unsigned long pump_start_ms; // ,
unsigned long waterflow_start_alarm_ms; //
unsigned long waterflow_start_alarm; //
unsigned long current_start_alarm_ms; // alarm
unsigned long current_start_alarm; // alarm
void setup() {
String cmd, number[22];
char c;
int i, Num;
boolean x = false, xx = false;
Serial.begin(BAUDRATE); // Arduino MEGA 2560 RX0<-(pin 0)/TX0->(pin 1)
Serial1.begin(BAUDRATE); // ESP8266, ESP8266 TX/RX RX1(pin 19)/TX1(pin 18)
rtc.begin(); // DS2321 RTC
pinMode(SSR_PUMP_OUT, OUTPUT); // SSRpin
pinMode(SSR_PUMP_IN, INPUT); // SSRpin
pinMode(SSR_TANK1_OUT, OUTPUT); // ssr_tank1pin
pinMode(SSR_TANK1_IN, INPUT); // ssr_tank1pin
pinMode(TRIG1_OUT, OUTPUT); // Trig1pin
pinMode(ECHO1_IN, INPUT); // Echo1pin
pinMode(TRIG2_OUT, OUTPUT); // Trig2pin
pinMode(ECHO2_IN, INPUT); // Echo2pin
pinMode(FLOWMETER_IN, INPUT); // pin
digitalWrite(SSR_PUMP_OUT, HIGH); // SSRpinHIGH
delay(300);
digitalWrite(SSR_TANK1_OUT, LOW); // SSRpinLOW
delay(300);
// Recall pump constant from MicroSD card
Serial.print("Initializing SD card... ");
if (!SD.begin(53)) Serial.println("failed!");
else Serial.println("done.");
delay(200);
if (SD.exists("constant.txt")) {
for (i = 0; i < 22; i++) number[i] = "";
i = 0;
myFile = SD.open("constant.txt");
if (myFile) {
// read from the file until there's nothing else in it:
while (myFile.available()) {
c = myFile.read();
Serial.write(c);
if (c != '\r') number[i] += c;
else {
c = myFile.read();
Serial.write(c);
i++;
}
}
// close the file:
myFile.close();
} else {
// if the file didn't open, print an error:
Serial.println("error opening constant.txt");
}
CT_FACTOR = number[0].toFloat();
CURRENT_0 = number[1].toFloat();
CURRENT_WATERFLOW = number[2].toFloat();
CURRENT_TOLERANCE = number[3].toFloat();
PUMP_CURRENT_SHUTDOWN = number[4].toInt();
TANK1_DRUM_HEIGHT = number[5].toInt();
TANK2_DRUM_HEIGHT = number[6].toInt();
TANK1_DRUM_CIRCUMFERENCE = number[7].toInt();
TANK2_DRUM_CIRCUMFERENCE = number[8].toInt();
TANK1_SONIC_TO_0 = number[9].toInt();
TANK2_SONIC_TO_0 = number[10].toInt();
TANK1_MAX_LEVEL = number[11].toInt();
TANK1_MIN_LEVEL = number[12].toInt();
TANK2_MAX_LEVEL = number[13].toInt();
TANK2_MIN_LEVEL = number[14].toInt();
FLOAT_BALL_FAILED = number[15].toInt();
LEVEL_SENSOR_FAILED = number[16].toInt();
LOW_FLOW = number[17].toInt();
PUMP_WATER_SHUTDOWN = number[18].toInt();
FLOW_METER_FACTOR = number[19].toFloat();
PUMP_AUTO_SHUTDOWN = number[20].toInt();
ENFORCE_REFILL = number[21].toInt();
Serial.print(String(CT_FACTOR,1) + " " + String(CURRENT_0,1) + " ");
Serial.print(String(CURRENT_WATERFLOW,1) + " " + String(CURRENT_TOLERANCE,1) + " ");
Serial.print(String(PUMP_CURRENT_SHUTDOWN) + " ");
Serial.print(String(TANK1_DRUM_HEIGHT) + " " + String(TANK2_DRUM_HEIGHT) + " ");
Serial.print(String(TANK1_DRUM_CIRCUMFERENCE) + " " + String(TANK2_DRUM_CIRCUMFERENCE) + " ");
Serial.print(String(TANK1_SONIC_TO_0) + " " + String(TANK2_SONIC_TO_0) + " ");
Serial.print(String(TANK1_MAX_LEVEL) + " " + String(TANK1_MIN_LEVEL) + " ");
Serial.print(String(TANK2_MAX_LEVEL) + " " + String(TANK2_MIN_LEVEL) + " ");
Serial.print(String(FLOAT_BALL_FAILED) + " " + String(LEVEL_SENSOR_FAILED) + " ");
Serial.print(String(LOW_FLOW) + " " + String(PUMP_WATER_SHUTDOWN) + " ");
Serial.print(String(FLOW_METER_FACTOR,2) + " ");
Serial.print(String(PUMP_AUTO_SHUTDOWN) + " " + String(ENFORCE_REFILL));
} else {
// open a new file and immediately close it:
Serial.println("Creating constant.txt...");
myFile = SD.open("constant.txt", FILE_WRITE);
myFile.close();
// delete the file:
Serial.println("Removing constant.txt...");
SD.remove("constant.txt");
// save pump constant for the first time
myFile = SD.open("constant.txt", FILE_WRITE);
// if the file opened okay, write to it:
if (myFile) {
Serial.print("Writing to constant.txt... ");
myFile.println(CT_FACTOR);
myFile.println(CURRENT_0);
myFile.println(CURRENT_WATERFLOW);
myFile.println(CURRENT_TOLERANCE);
myFile.println(PUMP_CURRENT_SHUTDOWN);
myFile.println(TANK1_DRUM_HEIGHT);
myFile.println(TANK2_DRUM_HEIGHT);
myFile.println(TANK1_DRUM_CIRCUMFERENCE);
myFile.println(TANK2_DRUM_CIRCUMFERENCE);
myFile.println(TANK1_SONIC_TO_0);
myFile.println(TANK2_SONIC_TO_0);
myFile.println(TANK1_MAX_LEVEL);
myFile.println(TANK1_MIN_LEVEL);
myFile.println(TANK2_MAX_LEVEL);
myFile.println(TANK2_MIN_LEVEL);
myFile.println(FLOAT_BALL_FAILED);
myFile.println(LEVEL_SENSOR_FAILED);
myFile.println(LOW_FLOW);
myFile.println(PUMP_WATER_SHUTDOWN);
myFile.println(FLOW_METER_FACTOR);
myFile.println(PUMP_AUTO_SHUTDOWN);
myFile.println(ENFORCE_REFILL);
// close the file:
myFile.close();
Serial.println("done.");
} else {
// if the file didn't open, print an error:
Serial.println("error opening constant.txt");
}
}
for (int i = 0; i < pump_max_count; i++)
pump_records[i] = "***"; // ***
for (int i = 0; i < alarm_max_count; i++) {
alarm_time[i] = "*******************"; // ,19*
alarm_code[i] = 0; // ,0
}
for (int i = 0; i < current_max_count; i++) amper[i] = 0; // 00
for (int i = 0; i < current_pre_count; i++) pre_amper[i] = 0; // 00
emon.current(CT_IN, CT_FACTOR); // CT,
do {
while (FAIL_ESP8266 == true) startWiFi_AP(); // WiFi
if (link_status == true) {
feedback = esp8266_ap + "^" + esp8266_sta + "\r\n";
Serial.print("esp8266 AP/STA IP = ");
Serial.println(feedback);
CIP_Close();
} else {
Serial.println("Wifi link_failed, retry...");
FAIL_ESP8266 = true; // WiFi
}
} while (FAIL_ESP8266 == true);
}
void loop() {
Do_Routing(); // , Irms
receive_from_mobile(); // Arduino
}
// WiFi
void startWiFi_AP() {
char c;
String s, cmd, AP_cmd;
int i, Num;
boolean x = false, NG = false;;
esp8266_ap = "";
Serial.println("\r\nAT+RST");
Serial1.println("AT+RST"); // ESP8266
do {
delay(3000);
while (!Serial1.available());
if (Serial1.find("OK")) { // AP?
delay(200);
s = Serial_feedback(100,1);
Serial1.println("AT+GMR"); // ESP8266
delay(300);
s = Serial_feedback(100,1);
Serial1.println("AT+CWMODE=3"); // station+AP
delay(300);
s = Serial_feedback(100,1);
Serial1.println("AT+CIPMUX=1"); //
delay(300);
s = Serial_feedback(100,1);
cmd = "AT+CIPSERVER=1," + String(SERVER_PORT);
serial_send(cmd,500); // SERVER
AP_cmd = "AT+CWSAP=\"";
AP_cmd += soft_AP_SSID; // AP
AP_cmd += "\",\"";
AP_cmd += soft_AP_PASSWORD; // AP
AP_cmd += "\",";
AP_cmd += "1"; // AP
AP_cmd += ",";
AP_cmd += "3"; // AP
Serial1.println(AP_cmd); // ESPAP
delay(100);
s = Serial_feedback(100,1);
Serial.println("AT+CIPAP?");
Serial1.println("AT+CIPAP?"); // APIP
delay(100);
while (!Serial1.available());
if (Serial1.find("+CIPAP:ip:\"")) { // STA?
delay(100);
c = Serial1.read();
do {
if (((c >= '0') && (c <= '9')) || (c == '.')) esp8266_ap += c;
c = Serial1.read();
} while (c != '\"');
Serial.print("+CIPAP:ip:\"");
Serial.print(esp8266_ap + "\"");
delay(100);
while (!Serial1.available());
do {
c = Serial1.read();
Serial.write(c);
} while (Serial1.available());
Serial.println("\r\n");
}
delay(100);
s = Serial_feedback(100,1);
Serial.println("^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^");
Serial.print("ESP8266 AP IP address = ");
Serial.println(esp8266_ap);
Serial.println("vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv\r\n");
do {
while (!Serial1.available()); // ESP8266?
if (Serial1.find("+IPD,")) { // ESP8266
Serial.print("+IPD,");
delay(100);
x = true;
c = Serial1.read();
Serial.print(c);
CONNECTION_ID = c - '0'; // ID
if ((CONNECTION_ID < 0) || (CONNECTION_ID > 4)) {
NG = true;
Serial.println("CONNECTION_ID error!");
}
c = Serial1.read(); // ,
Serial.print(c);
c = Serial1.read(); // total number of characters
Serial.print(c);
if ((c < '1') || (c > '9')) {
NG = true;
Serial.println("The first number error!");
}
c = Serial1.read();
Serial.print(c);
if (c != ':') {
if ((c < '0') || (c > '9')) {
NG = true;
Serial.println("The second number error!");
}
c = Serial1.read();
Serial.print(c);
if (c != ':') {
if ((c < '0') || (c > '9')) {
NG = true;
Serial.println("The third number error!");
}
}
}
c = Serial1.read();
Serial.print(c);
if (c != 'p') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'u') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'm') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'p') NG = true;
Num = Serial1.read() - '0'; // pump ID
Serial.print(Num);
Serial1.read(); // space
if (Num != 0) NG = true;
if (Num == 0) {
account[0] = "";
account[1] = "";
i = 0;
Serial.print(" ");
c = Serial1.read();
while ((c != '~') && (i < 2)) {
Serial.write(c);
if (c != '^') { account[i] += c; }
else { i++; }
c = Serial1.read();
}
Serial.print("\n");
home_AP_SSID = account[0];
home_AP_PASSWORD = account[1];
if (NG == true) {
home_AP_SSID = "Transfer";
home_AP_PASSWORD = "error!";
}
Serial.println("home_AP_SSID = " + home_AP_SSID);
Serial.println("home_AP_PASSWORD = " + home_AP_PASSWORD);
}
}
} while (x == false);
if (Num == 0) {
if (connectWiFi_STA(wifitimes)) { // WIFI?
FAIL_ESP8266 = false; // WIFI
link_status = true;
} else {
Serial.println(">>> connect WiFi Fail <<<\r\n"); // WIFI
FAIL_ESP8266 = false;
link_status = false;
}
}
} else {
Serial.println(">>> Module has't response <<<"); // ESP8266
FAIL_ESP8266 = false;
link_status = false;
}
} while (FAIL_ESP8266); // ,
}
// WIFI
boolean connectWiFi_STA(int time_out) {
String cmd, AP_cmd, s;
char c;
int i, n, t = time_out;
long t0, t1;
cmd = "AT+CWJAP=\"";
cmd += home_AP_SSID; //
cmd += "\",\"";
cmd += home_AP_PASSWORD; //
cmd += "\"";
Serial.println("\n" + cmd);
do {
Serial.println(cmd);
Serial1.println(cmd); // AP
delay(100);
t1 = 0;
do {
t0 = millis();
while (!Serial1.available()) {
t1 = millis() - t0;
if (t1 < 0) t1 += millis_end_time; // millis() overflow
if (t1 > 3000) t1 = -1;
}
} while ((!Serial1.available()) && (t1 != -1));
esp8266_sta = "";
if (Serial1.find("OK")) { // AP?
delay(100);
Serial.println("Join AP OK\r\n");
Serial1.println("AT+CIPSTA?"); // STA IP
if (Serial1.find("+CIPSTA:ip:\"")) { // STA?
delay(100);
c = Serial1.read();
do {
if (((c >= '0') && (c <= '9')) || (c == '.')) esp8266_sta += c;
c = Serial1.read();
} while (c != '\"');
Serial.print("+CIPSTA:ip:\"");
Serial.print(esp8266_sta + "\"");
delay(100);
while (!Serial1.available());
do {
c = Serial1.read();
Serial.write(c);
} while (Serial1.available());
Serial.println("\r\n");
delay(100);
}
for (i = 0; i < esp8266_sta.length(); i++) {
wifi_ap[i] = esp8266_sta.charAt(i);
}
wifi_ap[esp8266_sta.length()+1] = '\0';
Serial.println("^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^");
Serial.println("ESP8266 STA IP address = " + esp8266_sta);
Serial.println("vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv\r\n");
return true; // WIFI
}
Serial.print("Trying to connect to AP #");
Serial.println(t - time_out + 1);
} while ((time_out--) > 0);
return false; // WIFI
}
// Arduino
void receive_from_mobile() {
char c;
String cmd;
boolean NG = false;
//receive_start = millis(); //
//mobile_running_time = receive_start - send_start;
//if (mobile_running_time < 0) mobile_running_time += millis_end_time; // millis() overflow
//Serial.println("-------------------------------------------------------------");
//Serial.print("mobile_running_time = ");
//Serial.println(mobile_running_time);
//Serial.println("-------------------------------------------------------------");
if (Serial1.available()) { // ESP8266?
if (Serial1.find("+IPD,")) { // ESP8266
if (first_coming == false) {
first_coming = true;
}
Serial.print("+IPD,");
delay(100);
c = Serial1.read();
Serial.print(c);
CONNECTION_ID = c - '0'; // ID
if ((CONNECTION_ID < 0) || (CONNECTION_ID > 4)) {
NG = true;
Serial.println("CONNECTION_ID error!");
}
c = Serial1.read(); // ,
Serial.print(c);
c = Serial1.read(); // total number of characters
Serial.print(c);
if ((c < '1') || (c > '9')) {
NG = true;
Serial.println("The first number error!");
}
c = Serial1.read();
Serial.print(c);
if (c != ':') {
if ((c < '0') || (c > '9')) {
NG = true;
Serial.println("The second number error!");
}
c = Serial1.read();
Serial.print(c);
if (c != ':') {
if ((c < '0') || (c > '9')) {
NG = true;
Serial.println("The third number error!");
}
}
}
c = Serial1.read();
Serial.print(c);
if (c != 'p') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'u') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'm') NG = true;
c = Serial1.read();
Serial.print(c);
if (c != 'p') NG = true;
int Num = Serial1.read() - '0'; // pump ID
Serial.print(Num);
Serial1.read(); // space
if ((Num < 0) || (Num > 7)) NG = true;
if (NG == false) {
if (Num == 0) pump_data0(); // wifi
if (Num == 1) pump_data1(); // Arduinoon/off,,
if (Num == 2) pump_data2(); // Arduino
if (Num == 3) pump_data3(); // Arduino
if (Num == 4) pump_data4(); // Arduino
if (Num == 5) pump_data5(); // Arduino alarm
if (Num == 6) pump_data6(); // Arduino current
if (Num == 7) pump_data7(); // Arduino ?
} else {
Serial.println("Miss data while transferring...");
feedback = "NG\r\n"; // NG
CIP_Close();
}
}
}
}
// wifi
void pump_data0() {
}
// on/off,,
void pump_data1() {
}
//
void pump_data2() {
}
//
void pump_data3() {
}
//
void pump_data4() {
}
// Alarm
void pump_data5() {
}
// Arduino current
void pump_data6() {
}
// Arduino ?
void pump_data7() {
}
// CIPCLOSE function
void CIP_Close() {
String cmd;
cmd = "AT+CIPSEND="; // ESP8266
cmd += CONNECTION_ID;
cmd += ",";
cmd += feedback.length(); //
serial_send(cmd,20); // ESP8266
Serial.println(feedback);
Serial1.println(feedback);
delay(300);
cmd = "AT+CIPCLOSE=";
cmd += CONNECTION_ID;
cmd += "\r\n";
Serial1.println(cmd);
delay(100);
//send_start = millis(); //
//receive_from_mobile_time = send_start - receive_start;
//if (receive_from_mobile_time < 0) receive_from_mobile_time += millis_end_time; // millis() overflow
//Serial.println("-------------------------------------------------------------");
//Serial.print("receive_from_mobile_time = ");
//Serial.println(receive_from_mobile_time);
//Serial.println("-------------------------------------------------------------");
}
// Serial1
String Serial_feedback(long t, long dt) {
int n, i = 1;
long t0, t1 = 0;
char c;
String s = "";
do {
t0 = millis();
while ((!Serial1.available()) && (t1 != -1)) {
t1 = millis() - t0;
if (t1 < 0) t1 += millis_end_time; // millis() overflow
if (t1 > t) t1 = -1;
}
delay(dt);
if ( t1 != -1) {
n = Serial1.available();
Serial.println("----- (" + String(i) + ") => " + String(n) + " -----");
do {
c = Serial1.read();
if (((c >= ' ') && (c <= '~')) || (c == '\r') || (c == '\n')) {
Serial.write(c);
s += String(c);
}
} while (Serial1.available());
}
i++;
Serial.println("\r");
if (i > 20) t1 = -1;
} while (t1 != -1);
Serial.println("\r\n--------- END ---------\n");
return s;
}
// Serial1
void serial_send(String information, int waitTime) {
char c;
Serial1.println(information);
delay(waitTime);
while (!Serial1.available()); // Serial1?
while (Serial1.available()) { // Serial1?
c = Serial1.read(); //
if (((c >= ' ') && (c <= '~')) || (c == '\r') || (c == '\n'))
{ Serial.write(c); } // Arduino
}
}
// , 3,,
void Do_Routing() {
int i, swap;
int w1, w2, wt;
float duration1, duration2; //
float distance1, distance2; // cm
//unsigned long Do_Routing_start = millis(); // Do_Routing()
Start_Stop();
I01 = Irms; // 3,1
Get_Waterflow(); //
Start_Stop();
I02 = Irms; // 3,2
if ((digitalRead(SSR_PUMP_IN) == HIGH) && (Irms == 0)) ssr_state = 0;
// 2
digitalWrite(TRIG1_OUT, HIGH); // Trig120
delayMicroseconds(20);
digitalWrite(TRIG1_OUT, LOW);
duration1 = pulseIn (ECHO1_IN, HIGH); // echo1,
distance1 = (duration1/2)/29.1; // 1
//Serial.println("distance1 = " + String(distance1));
//unsigned long Do_Routing_half_time = millis() - Do_Routing_start;
//if (Do_Routing_half_time < 0) Do_Routing_half_time += millis_end_time; // millis() overflow
//Serial.print("Do_Routing_half_time = ");
//Serial.println(Do_Routing_half_time);
digitalWrite(TRIG2_OUT, HIGH); // Trig220
delayMicroseconds(20);
digitalWrite(TRIG2_OUT, LOW);
duration2 = pulseIn (ECHO2_IN, HIGH); // echo2,
distance2 = (duration2/2)/29.1; // 2
//Serial.println("distance2 = " + String(distance2));
tank1_cm = TANK1_SONIC_TO_0 - distance1; // 1(cm)
tank2_cm = TANK2_SONIC_TO_0 - distance2; // 2(cm)
tank1_drum_scale = (TANK1_DRUM_CIRCUMFERENCE * TANK1_DRUM_CIRCUMFERENCE)/(4 * 3.141592654 * 1000);
tank2_drum_scale = (TANK2_DRUM_CIRCUMFERENCE * TANK2_DRUM_CIRCUMFERENCE)/(4 * 3.141592654 * 1000);
Start_Stop();
I03 = Irms; // 3,3
if ((I01 > 0) || (I02 > 0) || (I03 > 0)) {
for (i = current_max_count - 1; i > 2; i--) amper[i] = amper[i - 3];
amper[2] = I01 * 100;
amper[1] = I02 * 100;
amper[0] = I03 * 100;
}
if ((amper_start == 1) && (amper_start_count <= current_max_count / 6)) { // current_max_count/6+3
pre_amper[amper_start_count * 3 + 2] = I01 * 100;
pre_amper[amper_start_count * 3 + 1] = I02 * 100;
pre_amper[amper_start_count * 3] = I03 * 100;
amper_start_count++;
}
if (TANK1_DRUM_CIRCUMFERENCE > 0) {
// 1,
if (tank1_cm <= 0) {
tank1_cm = 0;
alarm_code_send = 21;
alarm_list(alarm_code_send);
}
// 1?cm,
if ((tank1_cm > 0) && (tank1_cm <= (TANK1_MIN_LEVEL - LEVEL_SENSOR_FAILED))) {
alarm_code_send = 20;
alarm_list(alarm_code_send);
}
// 1?cm,
if ((tank1_cm >= (TANK1_MAX_LEVEL + FLOAT_BALL_FAILED)) && (tank1_cm < TANK1_DRUM_HEIGHT)) {
alarm_code_send = 19;
alarm_list(alarm_code_send);
}
// 1,
if (tank1_cm >= TANK1_DRUM_HEIGHT) {
tank1_cm = TANK1_DRUM_HEIGHT;
alarm_code_send = 18;
alarm_list(alarm_code_send);
}
}
if (TANK2_DRUM_CIRCUMFERENCE > 0) {
// 2,
if (tank2_cm <= 0) {
tank2_cm = 0;
alarm_code_send = 25;
alarm_list(alarm_code_send);
}
// 2?cm,
if ((tank2_cm > 0) && (tank2_cm <= (TANK2_MIN_LEVEL - LEVEL_SENSOR_FAILED))) {
alarm_code_send = 24;
alarm_list(alarm_code_send);
}
// 2?cm,
if ((tank2_cm >= (TANK2_MAX_LEVEL + FLOAT_BALL_FAILED)) && (tank2_cm < TANK2_DRUM_HEIGHT)) {
alarm_code_send = 23;
alarm_list(alarm_code_send);
}
// 2,
if (tank2_cm >= (TANK2_DRUM_HEIGHT)) {
tank2_cm = TANK2_DRUM_HEIGHT;
alarm_code_send = 22;
alarm_list(alarm_code_send);
}
}
// ,,,
if ((pump_start_min >= ENFORCE_REFILL) && (Irms > 0) && (ssr_state == 3)) {
Get_Irms();
Irms_tmp = Irms;
digitalWrite(SSR_TANK1_OUT, LOW);
delay(300);
Get_Irms();
if ((Irms / 2) < Irms_tmp) {
alarm_code_send = 7;
ssr_state = 1;
alarm_list(alarm_code_send);
}
}
// ,,,
if (((tank1_cm >= TANK1_MAX_LEVEL) && (TANK1_DRUM_CIRCUMFERENCE > 0)) && (Irms > 0)
&& ((tank2_cm >= TANK2_MAX_LEVEL) && (TANK2_DRUM_CIRCUMFERENCE > 0)) && (ssr_state == 3)) {
Get_Irms();
Irms_tmp = Irms;
digitalWrite(SSR_TANK1_OUT, LOW);
delay(300);
Get_Irms();
if ((Irms / 2) < Irms_tmp) {
alarm_code_send = 6;
ssr_state = 1;
alarm_list(alarm_code_send);
}
}
...
This file has been truncated, please download it to see its full contents.




_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

















{kind=link}
{kind=link}
Comments