

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
This project is a derivative of my "Nipkow Disk Based Digital Display Device" project.
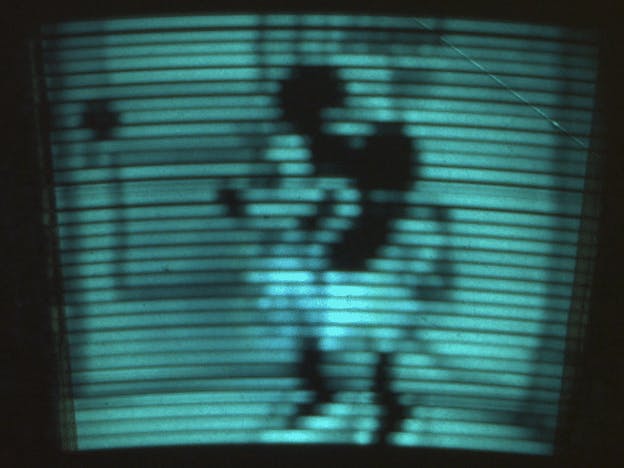
Chall commented "Neat! If you can support 30x30, you could do images. Like they did back in the 30's".
So I wanted to see if this was possible with Arduino.
#include <avr/io.h>
#include <avr/interrupt.h>
#include "Arduino.h"
#include <SPI.h>
#include <SD.h>
// each frame contains 32x64 pixels ( 2048)
// each pixel is represented as one byte in a file on the SDcard. Only the lower 6 bits are used.
// running at 16 frames/s about 32K bytes/s has to be read from the SDcard.
// the SD card can easily do that on average, but some reads take much long than average.
// To overcome this problem two 256 byte buffers are used. When the device is streaming bytes from one buffer the other is being filled from SD card.
#define PinPulse 8 // IR receiver circuit. (must be connected to input capture pin 8 )
#define DAC_0LSB 2
#define DAC_1 3
#define DAC_2 4
#define DAC_3 5
#define DAC_4 6
#define DAC_5 7
#define SyncPixel 1005 // pixel number that should correspond with synchronisation pulse. Tune this to so that pixel0 corresponds with the upper left corner.
const byte NumberOfPixelBits = 11; // 2^NumberOfPixelBits pixels
// global variables used in interrupt routines
volatile unsigned int Pixel = 0x0700; // current pixel index
volatile unsigned int lastT1capture, Period_Ticks; // used to calculate spinning frequency
volatile unsigned long NextOutputCompare32bit = 0;
volatile unsigned long PixelTime_16bitTickFraction = 1000000000;
volatile char SyncLow=0, SyncHigh =0;
File myFile;
uint8_t buffer[512];
int SubFrame = 0;
long Frame = 0;
void setup()
{
pinMode(DAC_0LSB, OUTPUT);
pinMode(DAC_1, OUTPUT);
pinMode(DAC_2, OUTPUT);
pinMode(DAC_3, OUTPUT);
pinMode(DAC_4, OUTPUT);
pinMode(DAC_5, OUTPUT);
pinMode(PinPulse, INPUT); // Configure input capture pin on timer1
digitalWrite(PinPulse,0); // floating may have 50 Hz noise on it.
if (!SD.begin(10)) {
return;
}
myFile = SD.open("mov_26.bin");
cli(); //clear interrupts while configuring timer1
TCCR1A = 0; //TC1 Control Register A
TCCR1B = B01000011; //TC1 Control Register B : free running 250kHz counter, noise canceller enabled, falling edge input capture
TIMSK1 = B00100010; //Timer/Counter 1 Interrupt Mask Register: Enable input capture Interupt (ICIE) , Enable Output Compare A Match Interrupt Enable (OCIEA)
sei(); // enable interrupts
}
// timer 1 capture interrupt: function is triggered each time the synchronisation hole passes the light sensor.
ISR (TIMER1_CAPT_vect)
{
unsigned int T1capture = ICR1 ; // read timer1 value when the sync occured
Period_Ticks = T1capture - lastT1capture; // period = time between new and previous sync
if (Period_Ticks > 1000) // ignore very short periods
{
sei(); // Increase max pixel clk by enabling nested interrupts (allows COMPA interrupt during sync interrupt)
lastT1capture = T1capture ;
signed int SyncError = Pixel - SyncPixel; // We expect a certain pixel number when sync occurs. Calculate error.
cli(); // atomic update of outputcompareStep32bit
// Calculate time between pixels = (time between syncs)/NumberOfPixels + correct part of the error.
// Expressed as 32bit value : 16 bit integer, 16bit fraction -> OutputCompareStep32bit
PixelTime_16bitTickFraction = ( ( long)Period_Ticks << (16 - NumberOfPixelBits) ) + ((signed long)SyncError << 6); // each sync a fraction of the error is corrected :
}
}
// timer 1 output compare A interrupt :function is triggered each time a new pixel should be send to the led
ISR(TIMER1_COMPA_vect)
{
PORTD = (PORTD & 0x03) | (((buffer[Pixel & 0x01FF]) & 0x3F)<<2); // write 6 lower buffer values to 6 bit DAC outputs on port D
OCR1A = (NextOutputCompare32bit >> 16); // set new output compare value ( = integer part of OutputCompareStep32bit )
NextOutputCompare32bit += (PixelTime_16bitTickFraction); // calculate new output compare value
if ((Pixel & 0x01FF)==0x00) SyncHigh=1; // trigger to load high bank from SDcard to buffer ( currently reading from low bank )
if ((Pixel & 0x01FF)==0x0100) SyncLow=1; // trigger to load low bank from SDcard to buffer ( currently reading from high bank )
Pixel++; // next pixel
if (Pixel > ((1 << NumberOfPixelBits) - 1)) { Pixel = 0; }
}
void loop() {
if (SyncLow) { SyncLow=0; myFile.read(buffer, 256); SubFrame++; }
if (SyncHigh) { SyncHigh=0; myFile.read(buffer+256, 256); SubFrame++;}
if (!myFile.available()) Frame=0;
if (SubFrame>7) { SubFrame=0; myFile.seek(2048*Frame); Frame++;}
}
Compressed folder containing c# project to convert bitmaps to binary
C#Takes N 64x32 pixel bitmap files (frame1.bmp ... frameN.bmp) and converts them to a binary file format read by Arduino
No preview (download only).


Comments