String serialin; //incoming serial data
String str; //store the state of opened/closed/safe pins
//relays
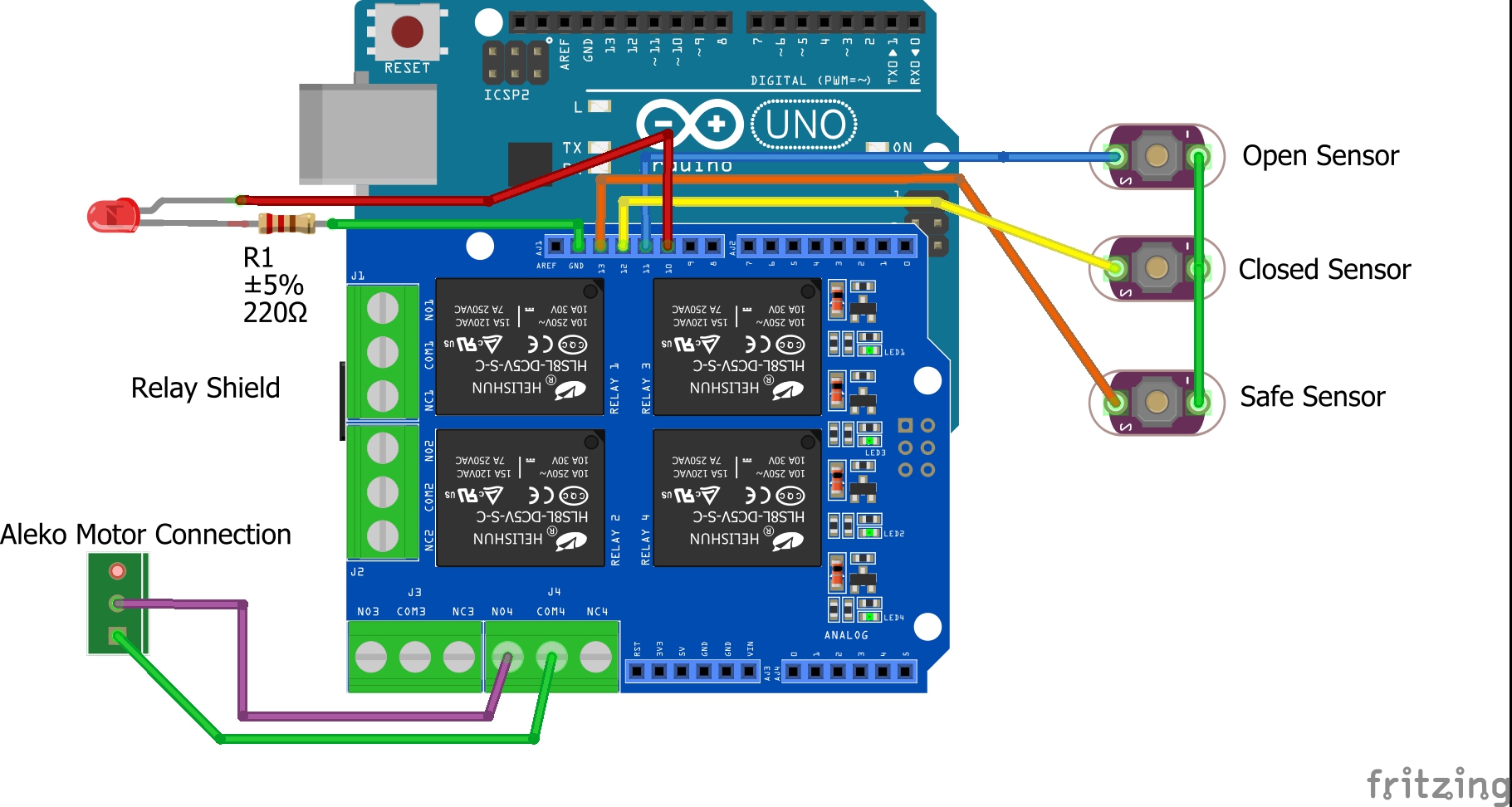
#define stop 4
#define sensor 5
#define close 6
#define open 7
//input sensors
#define opened 11 // roof open sensor
#define closed 12 // roof closed sensor
#define safe 13 // scope safety sensor
int led = 10; // the pin the scope safe LED is connected to
unsigned long end_time;
bool lost = false; //roof not reporting state
void setup() {
end_time=millis()+60000; //roof lost reset timer ~60 seconds change to suit your rquirments to determine if roof is lost
//Begin Serial Comunication(configured for 9600baud)
Serial.begin(9600);
//pin relay as OUTPUT
pinMode(open, OUTPUT);
pinMode(close, OUTPUT);
pinMode(stop, OUTPUT);
pinMode(sensor, OUTPUT);
//pins as INPUT
pinMode(closed, INPUT_PULLUP);
pinMode(opened, INPUT_PULLUP);
pinMode(safe, INPUT_PULLUP);
//Relay state
digitalWrite(open,LOW);
digitalWrite(close,LOW);
digitalWrite(stop,LOW);
digitalWrite(sensor,LOW);
Serial.write("RRCI#"); //init string
}
void loop() {
Timer();
if (digitalRead(safe) == LOW){
digitalWrite(led, HIGH); // Turn the LED on
}
else if (digitalRead(safe) == HIGH){
digitalWrite(led, LOW); // Turn the LED on
}
//Verify connection by serial
while (Serial.available()>0) {
//Read Serial data and alocate on serialin
serialin = Serial.readStringUntil('#');
if (serialin == "on"){ // turn scope sensor on
digitalWrite(sensor,HIGH);
}
if (serialin == "off"){ // turn scope sensor off
digitalWrite(sensor,LOW);
}
if (serialin == "x"){
digitalWrite(open,LOW);
}
else if (serialin == "open"){
if (digitalRead(sensor) == LOW){//turn on IR scope sensor
digitalWrite(sensor,HIGH);
}
delay(1000);
if (digitalRead(safe) == LOW){//open only if scope safe
digitalWrite(open,HIGH);
//delay(1000);
digitalWrite(sensor,LOW);
}
}
if (serialin == "y"){
digitalWrite(close,LOW);
}
else if (serialin == "close"){
if (digitalRead(sensor) == LOW){//turn on IR scope sensor
digitalWrite(sensor,HIGH);
}
delay(1000);
if (digitalRead(safe) == LOW){//close only if scope safe
digitalWrite(close,HIGH);
//delay(1000);
digitalWrite(sensor,LOW);
}
}
}
if (digitalRead(closed) == LOW) { //stop relays when 'closed' reached
if (digitalRead(close) == HIGH){//relays low if it was high
digitalWrite(close,LOW);
}
}
if (digitalRead(opened) == LOW) { //stop relays when 'opened' reached
if (digitalRead(open) == HIGH){//relays low if it was high
digitalWrite(open,LOW);
}
}
if (serialin == "Parkstatus"){ // exteranl query command to fetch RRCI data
Serial.println("0#");
serialin = "";
}
if (serialin == "get"){ // exteranl query command to fetch RRCI data - Two Pipelines(||) to make a boolean OR Comparission
if (digitalRead(opened) == LOW){
str += "opened,";
}
else if (digitalRead(closed) == LOW){
str += "closed,";
}
if ((digitalRead(closed) == HIGH) && (digitalRead(opened) == HIGH)){
str += "unknown,";
}
if (digitalRead(safe) == LOW){
str += "safe,";
}
else if (digitalRead(safe) == HIGH){
str += "unsafe,";
}
if ((digitalRead(closed) == HIGH) && (digitalRead(opened) == LOW) && (lost == false)){
str += "not_moving_o#";
end_time=millis()+60000; //reset the timer
}
if ((digitalRead(closed) == LOW) && (digitalRead(opened) == HIGH) && (lost == false)){
str += "not_moving_c#";
end_time=millis()+60000; //reset the timer
}
if ((digitalRead(closed) == HIGH) && (digitalRead(opened) == HIGH) && (lost == false)){
str += "moving#";
}
else if ((digitalRead(closed) == HIGH) && (digitalRead(opened) == HIGH) && (lost == true)){
str += "unknown#";
}
if (str.endsWith(",")) {
str += "unknown#";
}
Serial.println(str); //send serial data
serialin = "";
str = "";
//delay(100);
}
if (serialin == "Status"){
Serial.println("RoofOpen#");
}
serialin = "";
//str = "";
}
void Timer(){ // detect roof lost
if(millis()>=end_time){
//60 s have passed!!
if ((digitalRead(closed) == HIGH) && (digitalRead(opened)) == HIGH){
lost = true; //where the heck is the roof position?
}
}
if ((digitalRead(closed) == LOW) or (digitalRead(opened)) == LOW){
lost = false; //roof state is known
end_time=millis()+60000; //reset the timer
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
{kind=link}
Comments