
Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
I wanted to create a network camera that is capable of capturing movement and be able to access it easily through an app. Furthermore, the Telegram app isn't something that I am not familiar with as it also have been in the market for quite some time now.
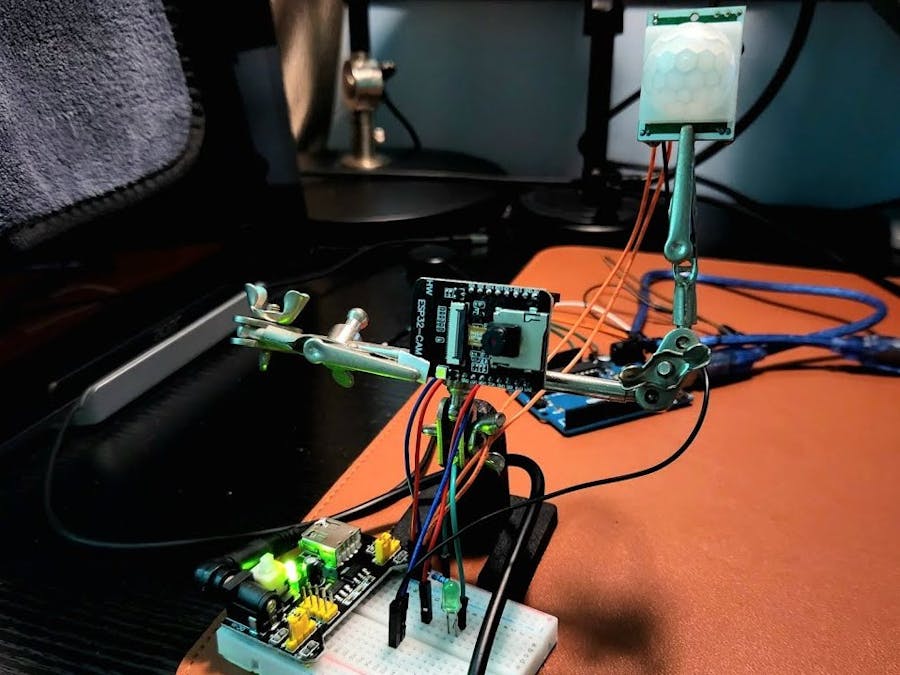
The idea of this project is to use the ESP32-CAM with the PIR sensor to notify me if the delivery person is at my door (as sometimes there's no one at home... or I could be busy blasting my earbuds with music 😅).
So I had this ESP32-CAM for a few years now and ashamed to say... didn't really do anything to it haha.. Alas! I took the courage to make something out of it.
Luckily I stumbled upon Rui Santos's amazing website, and it did make it clearer for me to carry out this project since he has already done a similar one.
In his website you can also follow his step by step tutorial on how to install the intended libraries to run this project too!
I hope this project serves well for you! 😊
/* ESP32-CAM PIR motion sensor to Telegram alert
Using the below mentioned project as the base template,
I wanted to create a network camera that is capable of
capturing movement and be able to access it easily
through an app. The idea was to use it to notify me if
the delivery person is at my door (as sometimes there's no one at home).
Luckily I stumbled upon Rui Santos's amazing website,
and it did make it easier for me since he has already done
such a project.
You can follow his step by step tutorial on how to
install the intended libraries to run this project too!
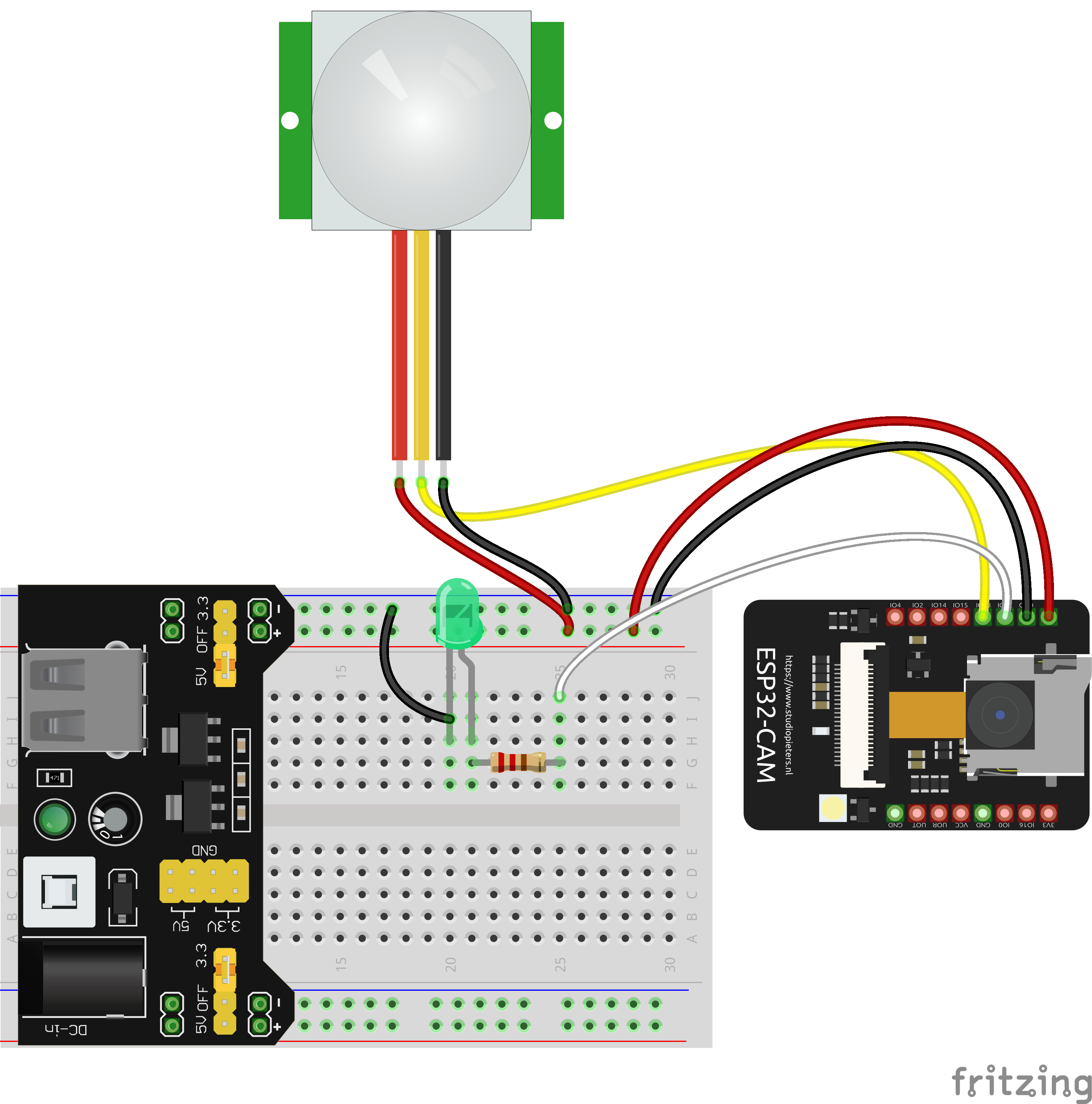
Components:
- Arduino Uno
- ESP32-CAM
- HC-SR501 PIR sensor
- Green LED
- 220Ohm resistor
- Helping-Hands tool with alligator clips
- Breadboard
- Some jumper wires
///////////////////////////////////////////////////////////////////////////////////////////////////
Rui Santos
Complete project details at https://RandomNerdTutorials.com/telegram-esp32-cam-photo-arduino/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*/
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiClientSecure.h>
#include "soc/soc.h"
#include "soc/rtc_cntl_reg.h"
#include "esp_camera.h"
#include <UniversalTelegramBot.h>
#include <ArduinoJson.h>
const char* ssid = "ENTER YOUR WIFI NETWORK";
const char* password = "*************";
// Initialize Telegram BOT
String BOTtoken = "**********:***********************************"; // your Bot Token (Get from Botfather)
// Use @myidbot to find out the chat ID of an individual or a group
// Also note that you need to click "start" on a bot before it can
// message you
String CHAT_ID = "**********";
bool sendPhoto = false;
WiFiClientSecure clientTCP;
UniversalTelegramBot bot(BOTtoken, clientTCP);
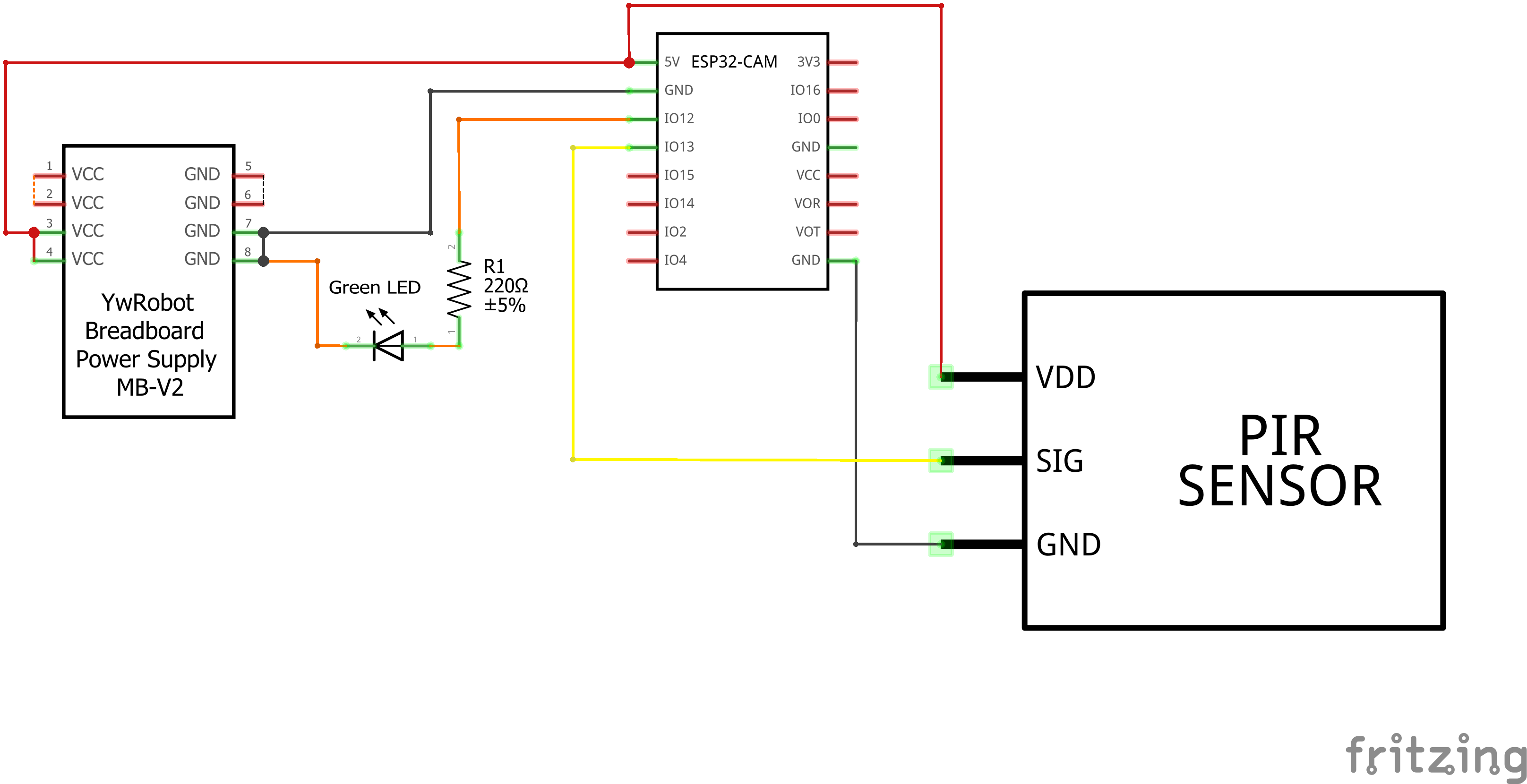
#define FLASH_LED_PIN 4
bool flashState = LOW;
//Checks for new messages every 1 second.
int botRequestDelay = 1000;
unsigned long lastTimeBotRan;
const int PIRsensor = 13;
const int led = 12;
int PIRstate = LOW; // we start, assuming no motion detected
int val = 0;
// the time we give the sensor to calibrate (approx. 10-60 secs according to datatsheet)
const int calibrationTime = 30; // 30 secs
//CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
void configInitCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if (psramFound()) {
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10; //0-63 lower number means higher quality
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12; //0-63 lower number means higher quality
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
delay(1000);
ESP.restart();
}
// Drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_CIF); // UXGA|SXGA|XGA|SVGA|VGA|CIF|QVGA|HQVGA|QQVGA
}
void handleNewMessages(int numNewMessages) {
Serial.print("Handle New Messages: ");
Serial.println(numNewMessages);
for (int i = 0; i < numNewMessages; i++) {
String chat_id = String(bot.messages[i].chat_id);
if (chat_id != CHAT_ID) {
bot.sendMessage(chat_id, "Unauthorized user", "");
continue;
}
// Print the received message
String text = bot.messages[i].text;
Serial.println(text);
String from_name = bot.messages[i].from_name;
if (text == "/start") {
String welcome = "Welcome , " + from_name + "\n";
welcome += "Use the following commands to interact with the ESP32-CAM \n";
welcome += "/photo : takes a new photo\n";
welcome += "/flash : toggles flash LED \n";
bot.sendMessage(CHAT_ID, welcome, "");
}
if (text == "/flash") {
flashState = !flashState;
digitalWrite(FLASH_LED_PIN, flashState);
Serial.println("Change flash LED state");
}
if (text == "/photo") {
sendPhoto = true;
Serial.println("New photo request");
}
}
}
String sendPhotoTelegram() {
const char* myDomain = "api.telegram.org";
String getAll = "";
String getBody = "";
camera_fb_t * fb = NULL;
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
delay(1000);
ESP.restart();
return "Camera capture failed";
}
Serial.println("Connect to " + String(myDomain));
if (clientTCP.connect(myDomain, 443)) {
Serial.println("Connection successful");
String head = "--c010blind3ngineer\r\nContent-Disposition: form-data; name=\"chat_id\"; \r\n\r\n" + CHAT_ID + "\r\n--c010blind3ngineer\r\nContent-Disposition: form-data; name=\"photo\"; filename=\"esp32-cam.jpg\"\r\nContent-Type: image/jpeg\r\n\r\n";
String tail = "\r\n--c010blind3ngineer--\r\n";
uint16_t imageLen = fb->len;
uint16_t extraLen = head.length() + tail.length();
uint16_t totalLen = imageLen + extraLen;
clientTCP.println("POST /bot" + BOTtoken + "/sendPhoto HTTP/1.1");
clientTCP.println("Host: " + String(myDomain));
clientTCP.println("Content-Length: " + String(totalLen));
clientTCP.println("Content-Type: multipart/form-data; boundary=c010blind3ngineer");
clientTCP.println();
clientTCP.print(head);
uint8_t *fbBuf = fb->buf;
size_t fbLen = fb->len;
for (size_t n = 0; n < fbLen; n = n + 1024) {
if (n + 1024 < fbLen) {
clientTCP.write(fbBuf, 1024);
fbBuf += 1024;
}
else if (fbLen % 1024 > 0) {
size_t remainder = fbLen % 1024;
clientTCP.write(fbBuf, remainder);
}
}
clientTCP.print(tail);
esp_camera_fb_return(fb);
int waitTime = 10000; // timeout 10 seconds
long startTimer = millis();
boolean state = false;
while ((startTimer + waitTime) > millis()) {
Serial.print(".");
delay(100);
while (clientTCP.available()) {
char c = clientTCP.read();
if (state == true) getBody += String(c);
if (c == '\n') {
if (getAll.length() == 0) state = true;
getAll = "";
}
else if (c != '\r')
getAll += String(c);
startTimer = millis();
}
if (getBody.length() > 0) break;
}
clientTCP.stop();
Serial.println(getBody);
}
else {
getBody = "Connected to api.telegram.org failed.";
Serial.println("Connected to api.telegram.org failed.");
}
return getBody;
}
void setup() {
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0);
// Init Serial Monitor
Serial.begin(115200);
// Set LED Flash as output
pinMode(FLASH_LED_PIN, OUTPUT);
digitalWrite(FLASH_LED_PIN, flashState);
// Set PIR sensor as input and LED as output
pinMode(PIRsensor, INPUT);
pinMode(led, OUTPUT);
// Give some time for the PIR sensor to warm up
Serial.println("Waiting for the sensor to warm up on first boot");
delay(calibrationTime * 1000); // Time converted back to miliseconds
// Blink LED 3 times to indicate PIR sensor warmed up
digitalWrite(led, HIGH);
delay(500);
digitalWrite(led, LOW);
delay(500);
digitalWrite(led, HIGH);
delay(500);
digitalWrite(led, LOW);
delay(500);
digitalWrite(led, HIGH);
delay(500);
digitalWrite(led, LOW);
Serial.println("PIR sensor is ACTIVE");
// Config and init the camera
configInitCamera();
// Connect to Wi-Fi
WiFi.mode(WIFI_STA);
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
clientTCP.setCACert(TELEGRAM_CERTIFICATE_ROOT); // Add root certificate for api.telegram.org
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(500);
}
Serial.println();
Serial.print("ESP32-CAM IP Address: ");
Serial.println(WiFi.localIP());
}
void loop() {
val = digitalRead(PIRsensor);
if (val == HIGH) {
digitalWrite(led, HIGH);
if (PIRstate == LOW) {
// we have just turned on because movement is detected
Serial.println("Motion detected!");
delay(500);
Serial.println("Sending photo to Telegram");
sendPhotoTelegram();
PIRstate = HIGH;
}
}
else if (sendPhoto) {
Serial.println("Preparing photo");
digitalWrite(FLASH_LED_PIN, HIGH);
Serial.println("Flash state set to HIGH");
delay(500);
sendPhotoTelegram();
sendPhoto = false;
digitalWrite(FLASH_LED_PIN, LOW);
Serial.println("Flash state set to LOW");
}
else if (millis() > lastTimeBotRan + botRequestDelay) {
int numNewMessages = bot.getUpdates(bot.last_message_received + 1);
while (numNewMessages) {
Serial.println("got response");
handleNewMessages(numNewMessages);
numNewMessages = bot.getUpdates(bot.last_message_received + 1);
}
lastTimeBotRan = millis();
}
else {
digitalWrite(led, LOW);
if (PIRstate == HIGH) {
Serial.println("Motion ended!");
PIRstate = LOW;
}
}
}







{kind=link}
{kind=link}
Comments