


Hardware components | ||||||
 |
| × | 1 | |||
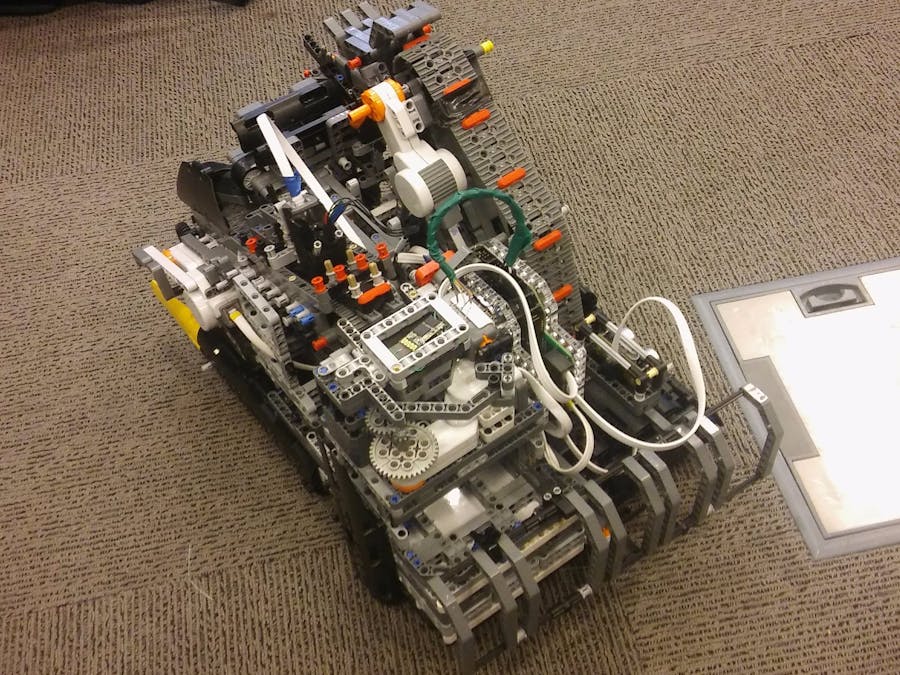
This robot was designed to pick up scattered Lego axles and sort them according to colour. These goals were achieved by harnessing the combined Front view power of mechanics, electronics and IT.
Chapter One: MechanicsMechanically the project was divided into several semi-independent elements, which are listed below:
The moving base
The machine has two wheels steered independently using two Lego motors and are both equipped with a reduction drive to provide maximal power and precision. The weight distribution was designed in such a way as to make the two wheels carry most of the platform's mass. The rest of the robot slides on flat Lego parts for great stability and minimum friction.
The axles pick up system
The initial lifting of the axles is performed by a fast spinning brush that sweeps the bricks onto a low lying platform and further onto an enclosed conveyor that takes the bricks up and onto the next stage of the process, that is another conveyor with a smooth surface designed to allow the axles to slide if they encounter resistance. On that belt there is a brick portioning device that closes and opens a gate to even out the brick distribution.
The sorting mechanism
The axles are transported on another tilted conveyor with a fishnet inspired system to create a single stream of axles that passes a colour sensor and then goes onto the final stage that distributes the bricks into their respective boxes.
The robot was controlled by a RoboCore and equipped with two touch sensors, one distance sensor, one colour sensor and a Bluetooth module. The first touch sensor was used on the bumper and the distance sensor was used to aid the robots autonomous mode. The colour sensor was custom built using a Lego light sensor and a RGB diode that was connected to the RoboCore using one of the multi-purpose external ports. The other touch sensor was used to allow the robot to find its initial sorting position. The Bluetooth module was connected using two voltage dividers to the RoboCore's external port and was used for smartphone-robot communication.
Chapter Three: ITThe whole machine was controlled using an external self made Android app that allowed to choose between an automatic and manual mode. After starting the machine it waits until the user chooses whether it should operate in manual or automatic mode. The manual mode are four directional arrows on the app that allow the user to simply control the machine's driving direction. The axes pick up system and sorting system is independent of the mode chosen. During the creation of this project the RoboCore platform was used extensively and provided a simple yet powerful way to control the machine. The code was written concurrently and several independent tasks were created.







Comments