


This bionic hand is controlled by an Arduino Nano V3 and uses 4 15kg servos to move the index, middel, ring and little finger and 3 9g servos to rotate the thumb and pull the tumb and the fingers open. This bionic hand it's structure is modelled after my hand so I could make a gel10 mold that would fit snug around it. I originally wanted to integrate some force feedback in the finger tips by using some small pushbuttons. This didn't turn out to well because the wires from the pushbuttons in combination with the gel10 mold caused to much friction in the joints of the fingers and the fingers had to push to hard to activate the pushbuttons. I'm now going to do some tests with currentsensors so I can messure the current going to the servos and when the current goes above the normal level then the servos would stop (that's the idea).
DetailsAll stl-files are free to download and can be found on Thingiverse. The link to thingiverse is on this page somwhere left down.
I made the mold using plastigel10.
STL-files can also be found here: https://www.thingiverse.com/thing:2838239
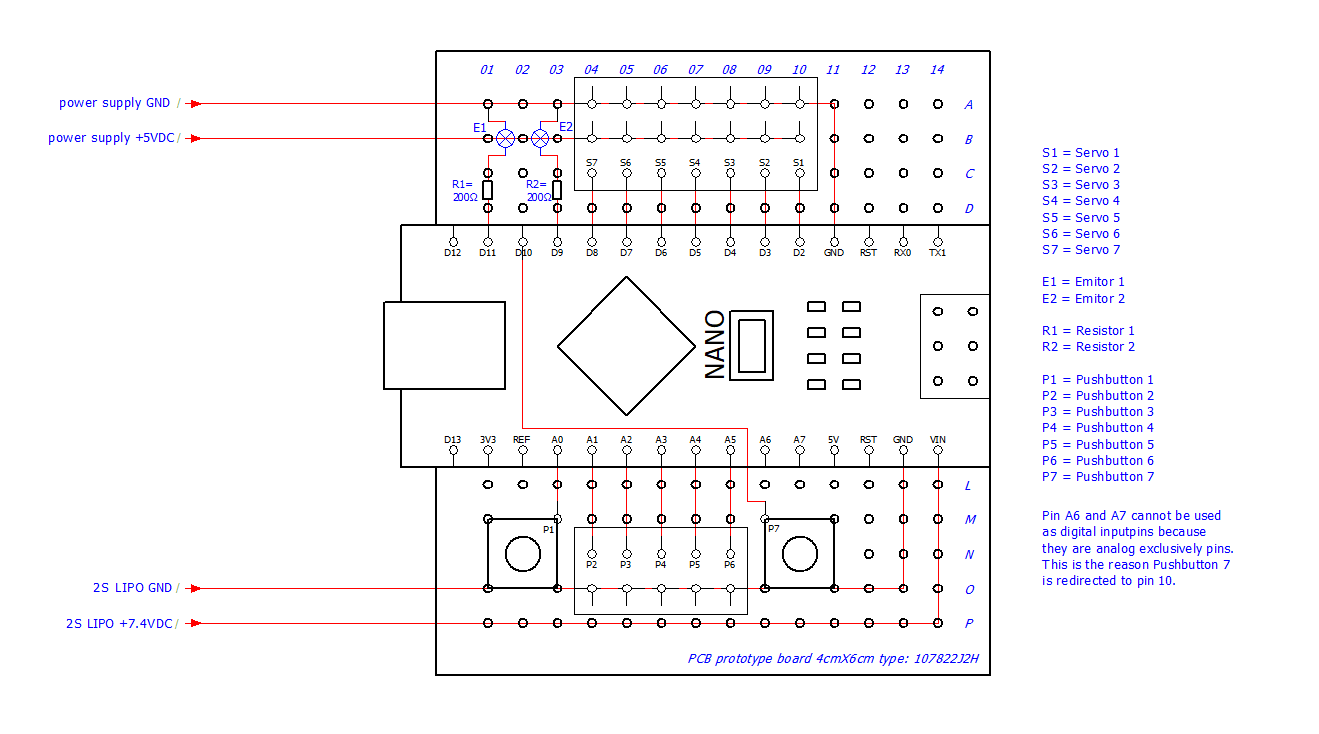
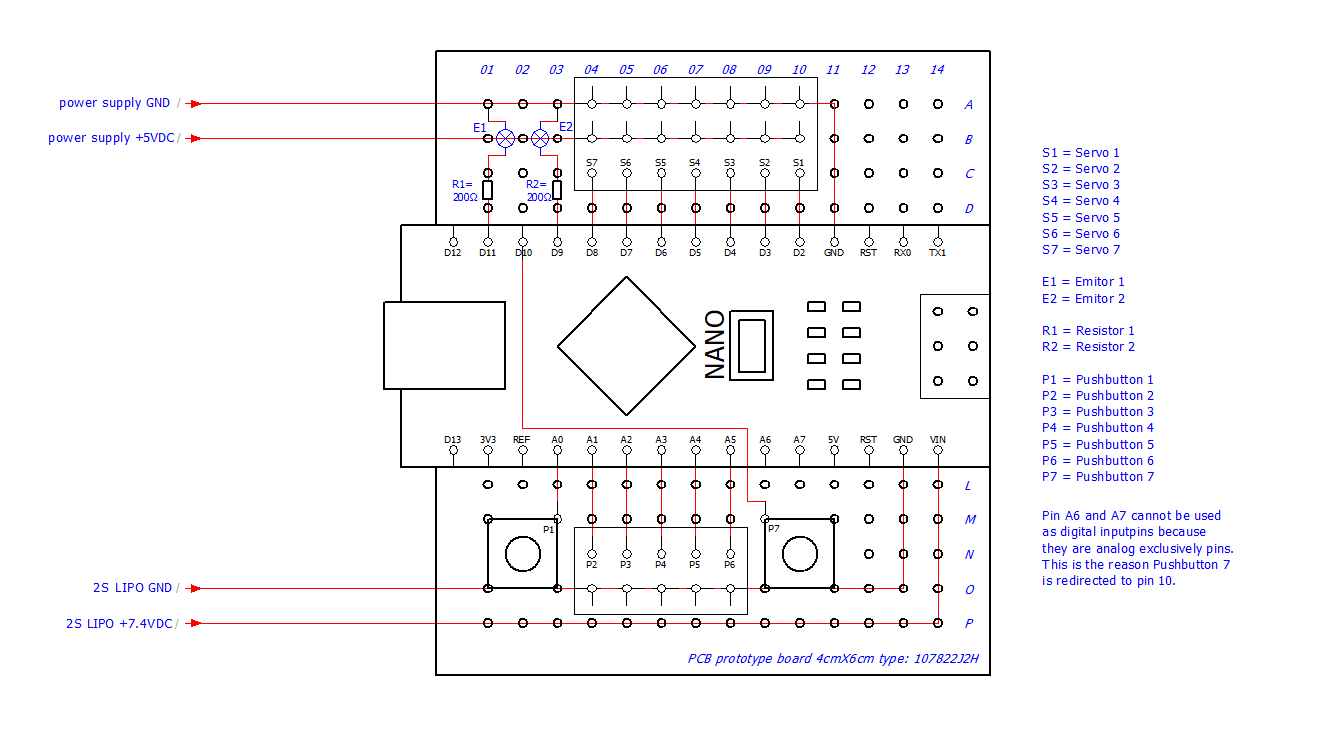
VideoFilescircuit diagram bionic arm V3.PNG: this is the layout for the Arduino board that I soldered
bionic_hand_code_V1.ino: This is the code for the arm as you see it in the YouTube video.







{kind=link}
{kind=link}
Comments