

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
To get familiar with the Netduino 3 WiFicand create a Visual Studio 2015 project, we can follow the instructions from the Netduino's official Getting Started guide.
We also want to set up the network settings as described in the Network guide.
After adding the following References to the Visual Studio project:
We should be able to build and run the code snippet from the Network page. We will extend this code later.
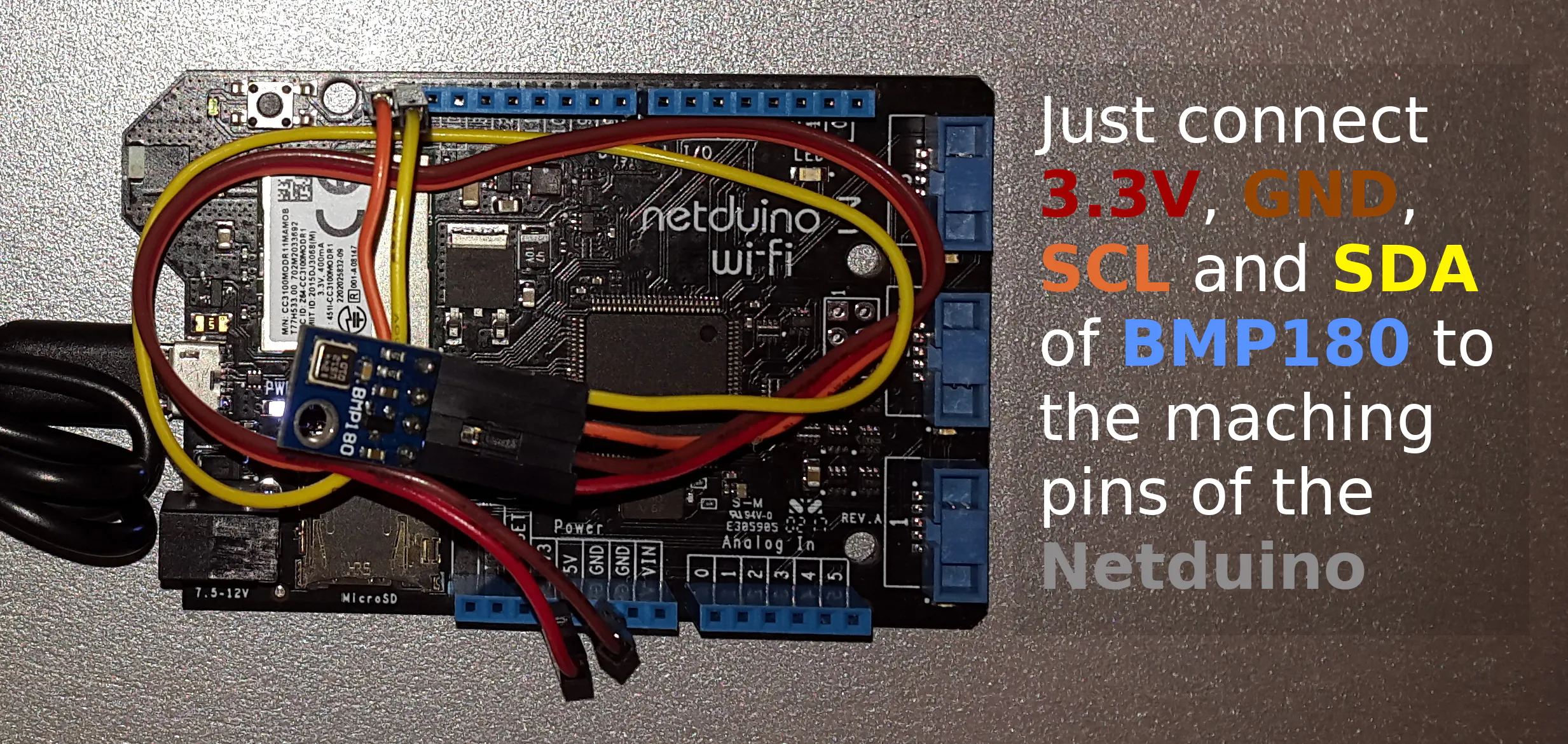
BMP180 SensorFor this project, we will use the BMP180 sensor module. The BMP180 sensor is capable of accurately measuring barometric pressure and temperature.
The module communicates over the I2C interface, for which the Netduino has built-in support.
The sensor can measure:
- temperature
- absolute pressure
But knowing our altitude we can also calculate the so called
- normalized / sea-level pressure
Which is the barometric pressure normally used for weather forecasts.
As an BMP180_Breakout_Arduino_Library library already existed for Arduino, I decided to rewrite / adapt it for Netduino. This resulted inBMP180 class which can used as follows:
BMP180 bmp180 = new BMP180();
bmp180.begin();
while (true) {
double temp, pressure;
unsafe
{
int delay = bmp180.startTemperature();
Thread.Sleep(delay);
bmp180.getTemperature(&temp);
delay = bmp180.startPressure(3);
Thread.Sleep(delay);
bmp180.getPressure(&pressure, temp);
}
double normalizedPressure = bmp180.sealevel(pressure, 350 /* meters */);
Debug.Print("Temp: " + temp);
Debug.Print("Absolute Pressure: " + pressure);
Debug.Print("Normalized (sea level) Pressure: " + normalizedPressure);
}
and outputs something like:
Temp: 27.4793969063678
Absolute Pressure: 977.21656659138705
Normalized (sea level) Pressure: 1018.7818315293708
As we are able get measurements we may want to make them available somehow.
I choose to implement a simple HTTP server, which returns the measurements in the universal JSON format:
{
"temperature": 27.4793969063678,
"absolute pressure": 977.21656659138705,
"normalized (sea level) pressure": 1018.7818315293708
}
First, we can check that we have no errors by build-ing the project:
Next, we can hit the Start button to run the project on the Netduino 3 WiFi:
The HTTP server can be accessed from any Web Browser using the IP allocated to the Netduino. The result should look like:
Sample debug output shown in VS's Output view:
Getting all the network interfaces.
Found 802.11 WiFi Interface
MAC Address: 60-D7-E3-A0-03-7E
DHCP enabled: True
Dynamic DNS enabled: False
The thread '<No Name>' (0x4) has exited with code 0 (0x0).
IP Address: 0.0.0.0
Subnet Mask: 0.0.0.0
Gateway: 0.0.0.0
SSID:Tokes_2.4GHz
Found 802.11 WiFi Interface
No IP Address
DHCP is enabled, attempting to get an IP Address
Sleep while obtaining an IP
...
Sleep while obtaining an IP
Got IP Address: 192.168.0.102 <----- This is the IP allocated to the Netduino
Waiting for HTTP connections (port 80)
Got HTTP connection.
Temp: 27.4793969063678
Absolute Pressure: 977.21656659138705
Normalized (sea level) Pressure: 1018.7818315293708
Sent response: {
"temperature": 27.4793969063678,
"absolute pressure": 977.21656659138705,
"normalized (sea level) pressure": 1018.7818315293708
}
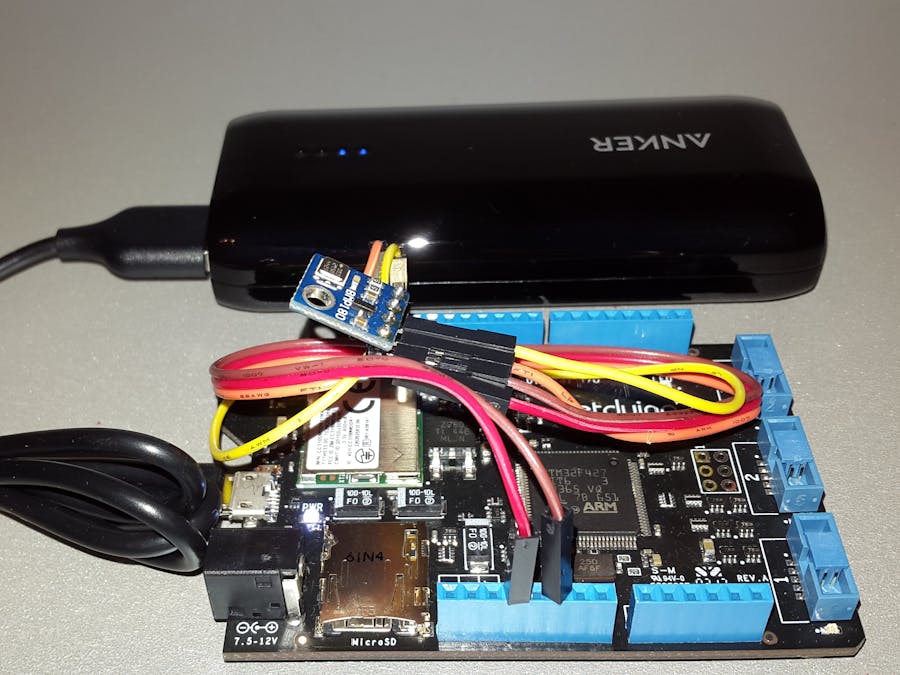
As we already deployed the code, we can power the Netduino from battery based power source, like a battery pack:
- Humidity sensor
- Custom enclosure
- Solar-powered battery charging
Cheers!
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using Microsoft.SPOT.Net.NetworkInformation;
using SecretLabs.NETMF.Hardware.Netduino;
using System;
using System.IO;
using System.Net;
using System.Net.Sockets;
using System.Text;
using System.Threading;
using Math = System.Math;
namespace Blinky
{
public class Program
{
public static void Main()
{
OutputPort led = new OutputPort(Pins.ONBOARD_LED, false);
App app = new App();
app.Run();
BMP180 bmp180 = new BMP180();
bmp180.begin();
Socket serverSocket = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp);
IPEndPoint listenerEndPoint = new IPEndPoint(IPAddress.Any, 80);
serverSocket.Bind(listenerEndPoint);
serverSocket.Listen(1);
Debug.Print("Waiting for HTTP connections (port 80)");
while (true)
{
var clientSocket = serverSocket.Accept();
led.Write(true);
Debug.Print("Got HTTP connection.");
double temp, pressure;
unsafe
{
int delay = bmp180.startTemperature();
Thread.Sleep(delay);
bmp180.getTemperature(&temp);
delay = bmp180.startPressure(3);
Thread.Sleep(delay);
bmp180.getPressure(&pressure, temp);
}
double normalizedPressure = bmp180.sealevel(pressure, 350 /* meters */);
Debug.Print("Temp: " + temp);
Debug.Print("Absolute Pressure: " + pressure);
Debug.Print("Normalized (sea level) Pressure: " + normalizedPressure);
string response = "{\n"
+ "\t\"temperature\": " + temp + ",\n"
+ "\t\"absolute pressure\": " + pressure + ",\n"
+ "\t\"normalized (sea level) pressure\": " + normalizedPressure + "\n"
+ "}";
string header = "HTTP/1.0 200 OK\r\nContent-Type: text; charset=utf-8\r\nContent-Length: " + response.Length.ToString() + "\r\nConnection: close\r\n\r\n";
clientSocket.Send(Encoding.UTF8.GetBytes(header), header.Length, SocketFlags.None);
clientSocket.Send(Encoding.UTF8.GetBytes(response), response.Length, SocketFlags.None);
Debug.Print("Sent response: " + response);
led.Write(false);
}
}
}
public class App
{
NetworkInterface[] _interfaces;
public bool IsRunning { get; set; }
public void Run()
{
this.IsRunning = true;
bool goodToGo = InitializeNetwork();
//if (goodToGo)
//{
// MakeWebRequest("http://google.com");
//}
this.IsRunning = false;
}
protected bool InitializeNetwork()
{
if (Microsoft.SPOT.Hardware.SystemInfo.SystemID.SKU == 3)
{
Debug.Print("Wireless tests run only on Device");
return false;
}
Debug.Print("Getting all the network interfaces.");
_interfaces = NetworkInterface.GetAllNetworkInterfaces();
// debug output
ListNetworkInterfaces();
// loop through each network interface
foreach (var net in _interfaces)
{
// debug out
ListNetworkInfo(net);
switch (net.NetworkInterfaceType)
{
case (NetworkInterfaceType.Ethernet):
Debug.Print("Found Ethernet Interface");
break;
case (NetworkInterfaceType.Wireless80211):
Debug.Print("Found 802.11 WiFi Interface");
break;
case (NetworkInterfaceType.Unknown):
Debug.Print("Found Unknown Interface");
break;
}
// check for an IP address, try to get one if it's empty
return CheckIPAddress(net);
}
// if we got here, should be false.
return false;
}
protected void MakeWebRequest(string url)
{
var httpWebRequest = (HttpWebRequest)WebRequest.Create(url);
httpWebRequest.Method = "GET";
var httpResponse = (HttpWebResponse)httpWebRequest.GetResponse();
using (var streamReader = new StreamReader(httpResponse.GetResponseStream()))
{
var result = streamReader.ReadToEnd();
Debug.Print("this is what we got from " + url + ": " + result);
}
}
protected bool CheckIPAddress(NetworkInterface net)
{
int timeout = 10000; // timeout, in milliseconds to wait for an IP. 10,000 = 10 seconds
// check to see if the IP address is empty (0.0.0.0). IPAddress.Any is 0.0.0.0.
if (net.IPAddress == IPAddress.Any.ToString())
{
Debug.Print("No IP Address");
if (net.IsDhcpEnabled)
{
Debug.Print("DHCP is enabled, attempting to get an IP Address");
// ask for an IP address from DHCP [note this is a static, not sure which network interface it would act on]
int sleepInterval = 10;
int maxIntervalCount = timeout / sleepInterval;
int count = 0;
while (IPAddress.GetDefaultLocalAddress() == IPAddress.Any && count < maxIntervalCount)
{
Debug.Print("Sleep while obtaining an IP");
Thread.Sleep(10);
count++;
};
// if we got here, we either timed out or got an address, so let's find out.
if (net.IPAddress == IPAddress.Any.ToString())
{
Debug.Print("Failed to get an IP Address in the alotted time.");
return false;
}
Debug.Print("Got IP Address: " + net.IPAddress.ToString());
return true;
//NOTE: this does not work, even though it's on the actual network device. [shrug]
// try to renew the DHCP lease and get a new IP Address
//net.RenewDhcpLease ();
//while (net.IPAddress == "0.0.0.0") {
// Thread.Sleep (10);
//}
}
else
{
Debug.Print("DHCP is not enabled, and no IP address is configured, bailing out.");
return false;
}
}
else
{
Debug.Print("Already had IP Address: " + net.IPAddress.ToString());
return true;
}
}
protected void ListNetworkInterfaces()
{
foreach (var net in _interfaces)
{
switch (net.NetworkInterfaceType)
{
case (NetworkInterfaceType.Ethernet):
Debug.Print("Found Ethernet Interface");
break;
case (NetworkInterfaceType.Wireless80211):
Debug.Print("Found 802.11 WiFi Interface");
break;
case (NetworkInterfaceType.Unknown):
Debug.Print("Found Unknown Interface");
break;
}
}
}
protected void ListNetworkInfo(NetworkInterface net)
{
Debug.Print("MAC Address: " + BytesToHexString(net.PhysicalAddress));
Debug.Print("DHCP enabled: " + net.IsDhcpEnabled.ToString());
Debug.Print("Dynamic DNS enabled: " + net.IsDynamicDnsEnabled.ToString());
Debug.Print("IP Address: " + net.IPAddress.ToString());
Debug.Print("Subnet Mask: " + net.SubnetMask.ToString());
Debug.Print("Gateway: " + net.GatewayAddress.ToString());
if (net is Wireless80211)
{
var wifi = net as Wireless80211;
Debug.Print("SSID:" + wifi.Ssid.ToString());
}
}
private static string BytesToHexString(byte[] bytes)
{
string hexString = string.Empty;
// Create a character array for hexidecimal conversion.
const string hexChars = "0123456789ABCDEF";
// Loop through the bytes.
for (byte b = 0; b < bytes.Length; b++)
{
if (b > 0)
hexString += "-";
// Grab the top 4 bits and append the hex equivalent to the return string.
hexString += hexChars[bytes[b] >> 4];
// Mask off the upper 4 bits to get the rest of it.
hexString += hexChars[bytes[b] & 0x0F];
}
return hexString;
}
}
public unsafe class BMP180
{
short AC1, AC2, AC3, VB1, VB2, MB, MC, MD;
ushort AC4, AC5, AC6;
double c5, c6, mc, md, x0, x1, x2, y0, y1, y2, p0, p1, p2;
char _error;
I2CDevice i2cDevice;
const byte BMP180_ADDR = 0x77; // 7-bit address
const byte BMP180_REG_CONTROL = 0xF4;
const byte BMP180_REG_RESULT = 0xF6;
const byte BMP180_COMMAND_TEMPERATURE = 0x2E;
const byte BMP180_COMMAND_PRESSURE0 = 0x34;
const byte BMP180_COMMAND_PRESSURE1 = 0x74;
const byte BMP180_COMMAND_PRESSURE2 = 0xB4;
const byte BMP180_COMMAND_PRESSURE3 = 0xF4;
public bool begin()
// Initialize library for subsequent pressure measurements
{
double c3, c4, b1;
// Start up the Arduino's "wire" (I2C) library:
i2cDevice = new I2CDevice(new I2CDevice.Configuration(BMP180_ADDR, 50));
//Wire.begin();
// The BMP180 includes factory calibration data stored on the device.
// Each device has different numbers, these must be retrieved and
// used in the calculations when taking pressure measurements.
// Retrieve calibration data from device:
fixed (short* ac1 = &AC1, ac2 = &AC2, ac3 = &AC3, vb1 = &VB1, vb2 = &VB2, mb = &MB, mcc = &MC, mdd = &MD)
{
fixed (ushort* ac4 = &AC4, ac5 = &AC5, ac6 = &AC6)
{
if (readInt(0xAA, ac1) &&
readInt(0xAC, ac2) &&
readInt(0xAE, ac3) &&
readUInt(0xB0, ac4) &&
readUInt(0xB2, ac5) &&
readUInt(0xB4, ac6) &&
readInt(0xB6, vb1) &&
readInt(0xB8, vb2) &&
readInt(0xBA, mb) &&
readInt(0xBC, mcc) &&
readInt(0xBE, mdd))
{
// All reads completed successfully!
// If you need to check your math using known numbers,
// you can uncomment one of these examples.
// (The correct results are commented in the below functions.)
// Example from Bosch datasheet
// AC1 = 408; AC2 = -72; AC3 = -14383; AC4 = 32741; AC5 = 32757; AC6 = 23153;
// B1 = 6190; B2 = 4; MB = -32768; MC = -8711; MD = 2868;
// Example from http://wmrx00.sourceforge.net/Arduino/BMP180-Calcs.pdf
// AC1 = 7911; AC2 = -934; AC3 = -14306; AC4 = 31567; AC5 = 25671; AC6 = 18974;
// VB1 = 5498; VB2 = 46; MB = -32768; MC = -11075; MD = 2432;
/*
Serial.print("AC1: "); Serial.println(AC1);
Serial.print("AC2: "); Serial.println(AC2);
Serial.print("AC3: "); Serial.println(AC3);
Serial.print("AC4: "); Serial.println(AC4);
Serial.print("AC5: "); Serial.println(AC5);
Serial.print("AC6: "); Serial.println(AC6);
Serial.print("VB1: "); Serial.println(VB1);
Serial.print("VB2: "); Serial.println(VB2);
Serial.print("MB: "); Serial.println(MB);
Serial.print("MC: "); Serial.println(MC);
Serial.print("MD: "); Serial.println(MD);
*/
// Compute floating-point polynominals:
c3 = 160.0 * Math.Pow(2, -15) * AC3;
c4 = Math.Pow(10, -3) * Math.Pow(2, -15) * AC4;
b1 = Math.Pow(160, 2) * Math.Pow(2, -30) * VB1;
c5 = (Math.Pow(2, -15) / 160) * AC5;
c6 = AC6;
mc = (Math.Pow(2, 11) / Math.Pow(160, 2)) * MC;
md = MD / 160.0;
x0 = AC1;
x1 = 160.0 * Math.Pow(2, -13) * AC2;
x2 = Math.Pow(160, 2) * Math.Pow(2, -25) * VB2;
y0 = c4 * Math.Pow(2, 15);
y1 = c4 * c3;
y2 = c4 * b1;
p0 = (3791.0 - 8.0) / 1600.0;
p1 = 1.0 - 7357.0 * Math.Pow(2, -20);
p2 = 3038.0 * 100.0 * Math.Pow(2, -36);
/*
Serial.println();
Serial.print("c3: "); Serial.println(c3);
Serial.print("c4: "); Serial.println(c4);
Serial.print("c5: "); Serial.println(c5);
Serial.print("c6: "); Serial.println(c6);
Serial.print("b1: "); Serial.println(b1);
Serial.print("mc: "); Serial.println(mc);
Serial.print("md: "); Serial.println(md);
Serial.print("x0: "); Serial.println(x0);
Serial.print("x1: "); Serial.println(x1);
Serial.print("x2: "); Serial.println(x2);
Serial.print("y0: "); Serial.println(y0);
Serial.print("y1: "); Serial.println(y1);
Serial.print("y2: "); Serial.println(y2);
Serial.print("p0: "); Serial.println(p0);
Serial.print("p1: "); Serial.println(p1);
Serial.print("p2: "); Serial.println(p2);
*/
// Success!
return true;
}
else
{
// Error reading calibration data; bad component or connection?
return false;
}
}
}
}
bool readInt(byte address, short* value)
// Read a signed integer (two bytes) from device
// address: register to start reading (plus subsequent register)
// value: external variable to store data (function modifies value)
{
byte[] data = new byte[2];
data[0] = address;
if (readBytes(data, 2))
{
*value = (short)(((short)data[0] << 8) | (short)data[1]);
//if (*value & 0x8000) *value |= 0xFFFF0000; // sign extend if negative
return true;
}
*value = 0;
return false;
}
bool readUInt(byte address, ushort* value)
// Read an unsigned integer (two bytes) from device
// address: register to start reading (plus subsequent register)
// value: external variable to store data (function modifies value)
{
byte[] data = new byte[2];
data[0] = address;
if (readBytes(data, 2))
{
*value = (ushort)(((ushort)data[0] << 8) | (ushort)data[1]);
return true;
}
*value = 0;
return false;
}
bool readBytes(byte[] values, byte length)
// Read an array of bytes from device
// values: external array to hold data. Put starting register in values[0].
// length: number of bytes to read
{
char x;
// write the address
int bytesWritten = i2cDevice.Execute(new I2CDevice.I2CTransaction[] {
I2CDevice.CreateWriteTransaction(new byte[] { values[0] })
}, 100);
if (bytesWritten > 0)
{
int bytesRead = i2cDevice.Execute(new I2CDevice.I2CTransaction[] {
I2CDevice.CreateReadTransaction(values)
}, 100);
return true;
}
return false;
}
bool writeBytes(byte[] values, byte length)
// Write an array of bytes to device
// values: external array of data to write. Put starting register in values[0].
// length: number of bytes to write
{
char x;
int bytesWritten = i2cDevice.Execute(new I2CDevice.I2CTransaction[] {
I2CDevice.CreateWriteTransaction(values)
}, 100);
if (bytesWritten > 0)
return true;
else
return false;
}
public int startTemperature()
// Begin a temperature reading.
// Will return delay in ms to wait, or 0 if I2C error
{
byte[] data = new byte[2];
bool result;
data[0] = BMP180_REG_CONTROL;
data[1] = BMP180_COMMAND_TEMPERATURE;
result = writeBytes(data, 2);
if (result) // good write?
return (5); // return the delay in ms (rounded up) to wait before retrieving data
else
return (0); // or return 0 if there was a problem communicating with the BMP
}
public bool getTemperature(double* T)
// Retrieve a previously-started temperature reading.
// Requires begin() to be called once prior to retrieve calibration parameters.
// Requires startTemperature() to have been called prior and sufficient time elapsed.
// T: external variable to hold result.
// Returns 1 if successful, 0 if I2C error.
{
byte[] data = new byte[2];
bool result;
double tu, a;
data[0] = BMP180_REG_RESULT;
result = readBytes(data, 2);
if (result) // good read, calculate temperature
{
tu = (data[0] * 256.0) + data[1];
//example from Bosch datasheet
//tu = 27898;
//example from http://wmrx00.sourceforge.net/Arduino/BMP085-Calcs.pdf
//tu = 0x69EC;
a = c5 * (tu - c6);
*T = a + (mc / (a + md));
/*
Serial.println();
Serial.print("tu: "); Serial.println(tu);
Serial.print("a: "); Serial.println(a);
Serial.print("T: "); Serial.println(*T);
*/
}
return (result);
}
public byte startPressure(byte oversampling)
// Begin a pressure reading.
// Oversampling: 0 to 3, higher numbers are slower, higher-res outputs.
// Will return delay in ms to wait, or 0 if I2C error.
{
byte[] data = new byte[2];
bool result;
byte delay;
data[0] = BMP180_REG_CONTROL;
switch (oversampling)
{
case 0:
data[1] = BMP180_COMMAND_PRESSURE0;
delay = 5;
break;
case 1:
data[1] = BMP180_COMMAND_PRESSURE1;
delay = 8;
break;
case 2:
data[1] = BMP180_COMMAND_PRESSURE2;
delay = 14;
break;
case 3:
data[1] = BMP180_COMMAND_PRESSURE3;
delay = 26;
break;
default:
data[1] = BMP180_COMMAND_PRESSURE0;
delay = 5;
break;
}
result = writeBytes(data, 2);
if (result) // good write?
return (delay); // return the delay in ms (rounded up) to wait before retrieving data
else
return (0); // or return 0 if there was a problem communicating with the BMP
}
public bool getPressure(double* P, double T)
// Retrieve a previously started pressure reading, calculate abolute pressure in mbars.
// Requires begin() to be called once prior to retrieve calibration parameters.
// Requires startPressure() to have been called prior and sufficient time elapsed.
// Requires recent temperature reading to accurately calculate pressure.
// P: external variable to hold pressure.
// T: previously-calculated temperature.
// Returns 1 for success, 0 for I2C error.
// Note that calculated pressure value is absolute mbars, to compensate for altitude call sealevel().
{
byte[] data = new byte[3];
bool result;
double pu, s, x, y, z;
data[0] = BMP180_REG_RESULT;
result = readBytes(data, 3);
if (result) // good read, calculate pressure
{
pu = (data[0] * 256.0) + data[1] + (data[2] / 256.0);
//example from Bosch datasheet
//pu = 23843;
//example from http://wmrx00.sourceforge.net/Arduino/BMP085-Calcs.pdf, pu = 0x982FC0;
//pu = (0x98 * 256.0) + 0x2F + (0xC0/256.0);
s = T - 25.0;
x = (x2 * Math.Pow(s, 2)) + (x1 * s) + x0;
y = (y2 * Math.Pow(s, 2)) + (y1 * s) + y0;
z = (pu - x) / y;
*P = (p2 * Math.Pow(z, 2)) + (p1 * z) + p0;
/*
Serial.println();
Serial.print("pu: "); Serial.println(pu);
Serial.print("T: "); Serial.println(*T);
Serial.print("s: "); Serial.println(s);
Serial.print("x: "); Serial.println(x);
Serial.print("y: "); Serial.println(y);
Serial.print("z: "); Serial.println(z);
Serial.print("P: "); Serial.println(*P);
*/
}
return (result);
}
public double sealevel(double P, double A)
// Given a pressure P (mb) taken at a specific altitude (meters),
// return the equivalent pressure (mb) at sea level.
// This produces pressure readings that can be used for weather measurements.
{
return (P / Math.Pow(1 - (A / 44330.0), 5.255));
}
public double altitude(double P, double P0)
// Given a pressure measurement P (mb) and the pressure at a baseline P0 (mb),
// return altitude (meters) above baseline.
{
return (44330.0 * (1 - Math.Pow(P / P0, 1 / 5.255)));
}
public char getError()
// If any library command fails, you can retrieve an extended
// error code using this command. Errors are from the wire library:
// 0 = Success
// 1 = Data too long to fit in transmit buffer
// 2 = Received NACK on transmit of address
// 3 = Received NACK on transmit of data
// 4 = Other error
{
return (_error);
}
}
}








{kind=link}
Comments