


Hardware components | ||||||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
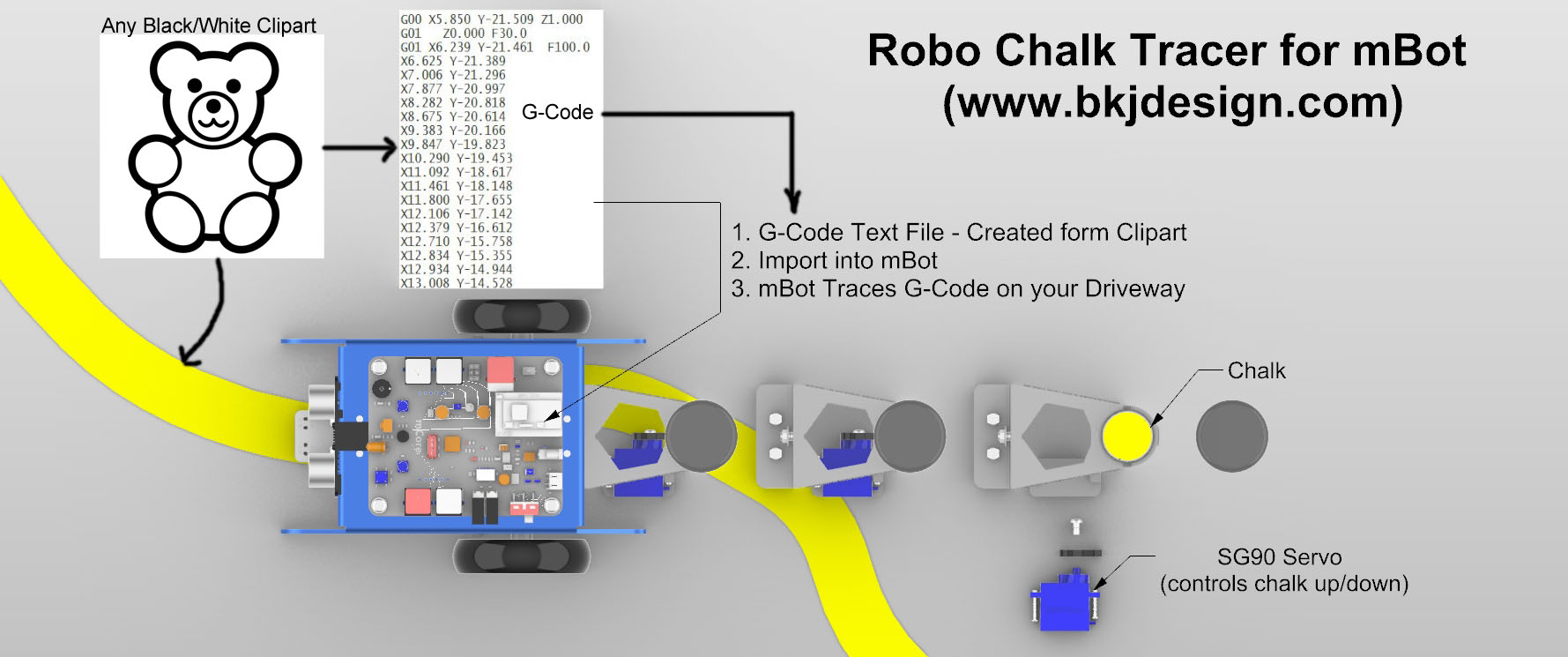
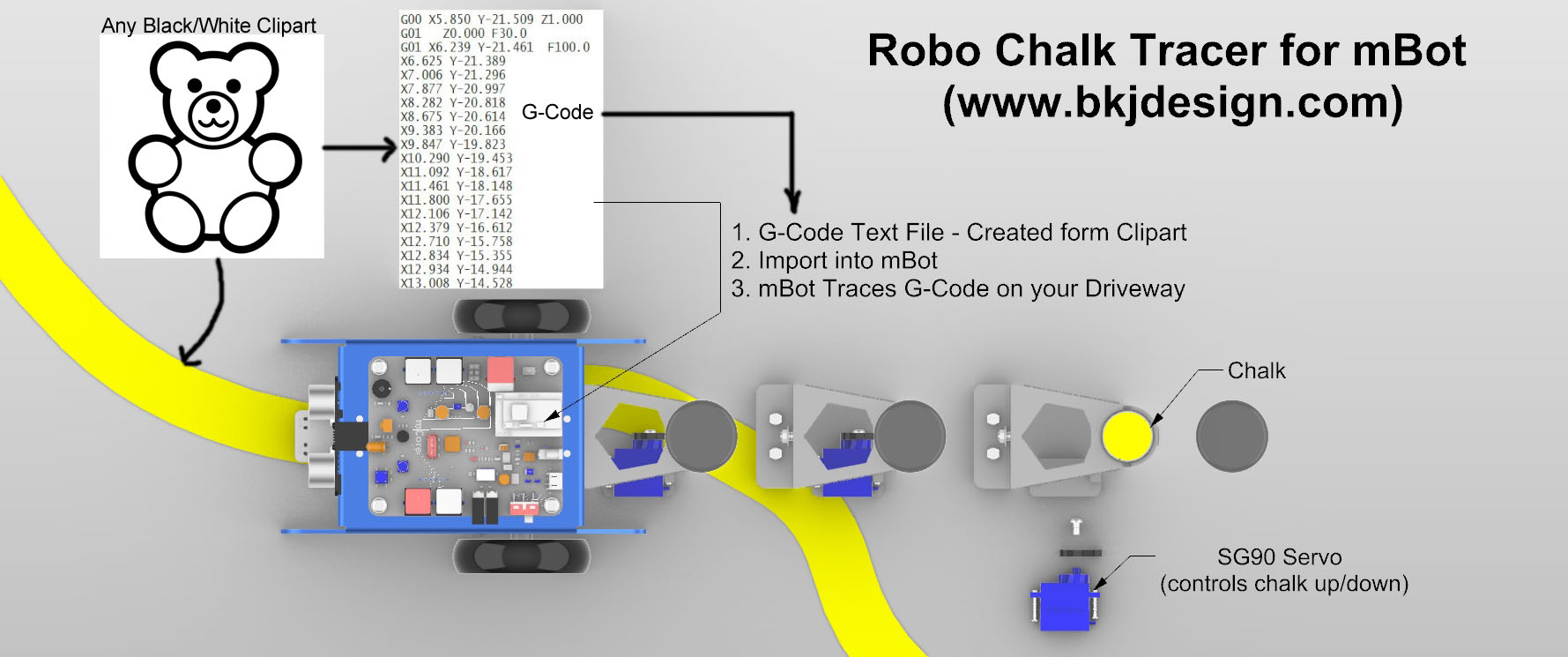
Objective: use the mBot to trace a chalk pattern on a sidewalk or driveway.
The mBot would be programmed to follow any black and white clip-art pattern.The pattern would be converted into a vector path using the free Inkscape software. This path profile would be converted into a G-Code text file using the G-Code generator in Inkscape. (FYI there are other programs that do this as well)
I have the mechanics and hardware worked out along with free software options to generate the G-code clip-art pattern text file the robot would follow. Have been exploring the mBot, but I need coding help. I don’t know how or if the mBot can be set up to read a G-code text file of "X Y" coordinates that create the pattern. There is also a SG90 servo that controls the chalk up/down for when the mBot moves from pattern to pattern. The servo would be activated by the "Z1" for chalk up and "Z0' for chalk down in the G-code file. The total servo programed rotation would be from 0 -> 30 degrees.
{kind=link}

Comments