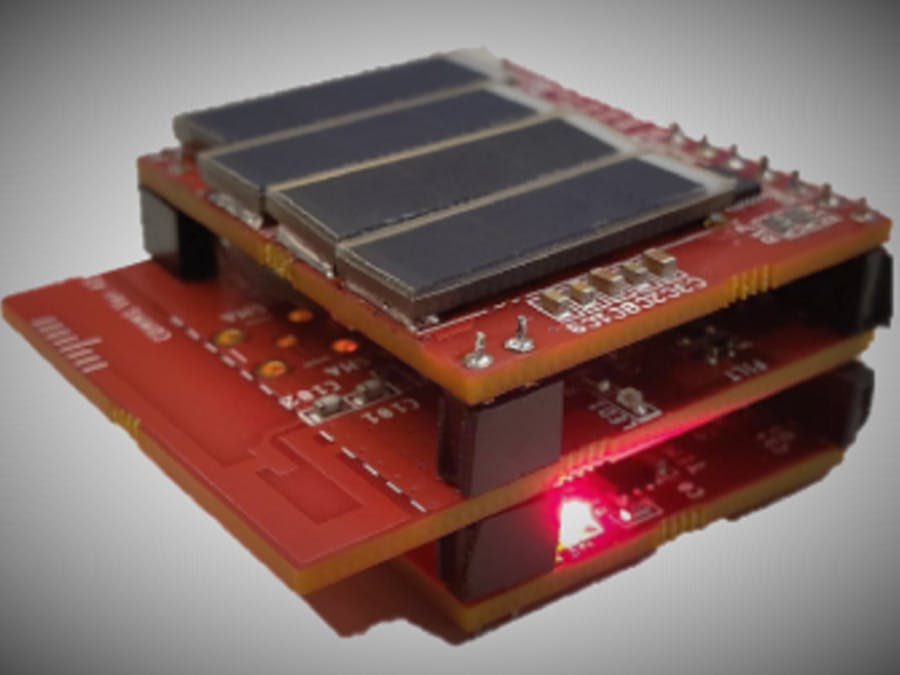
For our senior design project at Rice University, we were tasked with building a small, modular, and self-powered device that could collect various sensor data and communicate it wirelessly to an Internet of Things. We wanted the device to be solar-powered, as solar power is currently the most efficient way to harvest energy, and for the device to be smaller than 50 mm by 50 mm by 20 mm. Finally, the device needed to be able to integrate many different types of data. We created 3 boards that stack together. The top board is a power board that collects power from solar cells and uses a TI energy harvesting chip to efficiently charge a battery. The middle board is a communications board whose main component is the CC2652R, which can handle multiple wireless protocols for a more modular IoT range of applications. Finally, we have a sensor board that uses an MSP430 to control the other boards and collect data from a sensor, that can be on board or attached to external IO pins. We wrote code that allowed all of the boards to effectively interface, and also formulated code for I2C, UART, and SPI protocols, increasing the range of sensors we can communicate with. Our final device was 30 mm by 40 mm by 20 mm, fitting well inside our size constraint. Furthermore, we are able to sense and transmit every 4 seconds in direct sunlight without affecting battery capacity.












Comments