


Hardware components | ||||||
| × | 1 | ||||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 5 | |||
| × | 3 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Seguramente montar una BLE ROB no tiene demasiado misterio, sin embargo conozco a muchas personas sin perfil técnico que disfrutan pudiendo jugar un rato a ser “creadores”.
Entre ellos se cuentan algunos padres e hijos que encuentran en esta actividad una forma de tener “la excusa” para estar con sus hijos y construir algo juntos, o sea que tienen en bandeja el mejor argumento para compartir una actividad sin que “el hijo” le diga al padre lo de “vaya coñazo!”.
Este es uno de mis ‘labs’ favoritos por la facilidad de llevarlo a cabo. Os aseguro que con un poco "maña" lo tendréis funcionando en menos de una hora, y esto es todo un éxito teniendo en cuenta que montaremos todo el chasis, programaremos el bluetoothLE de una 101 en C y para rematarlo lo gobernaremos desde nuestro ‘phone’ sin necesidad de desarrollar ninguna aplicación de móvil.
Pues venga… pongamos manos a la obra.
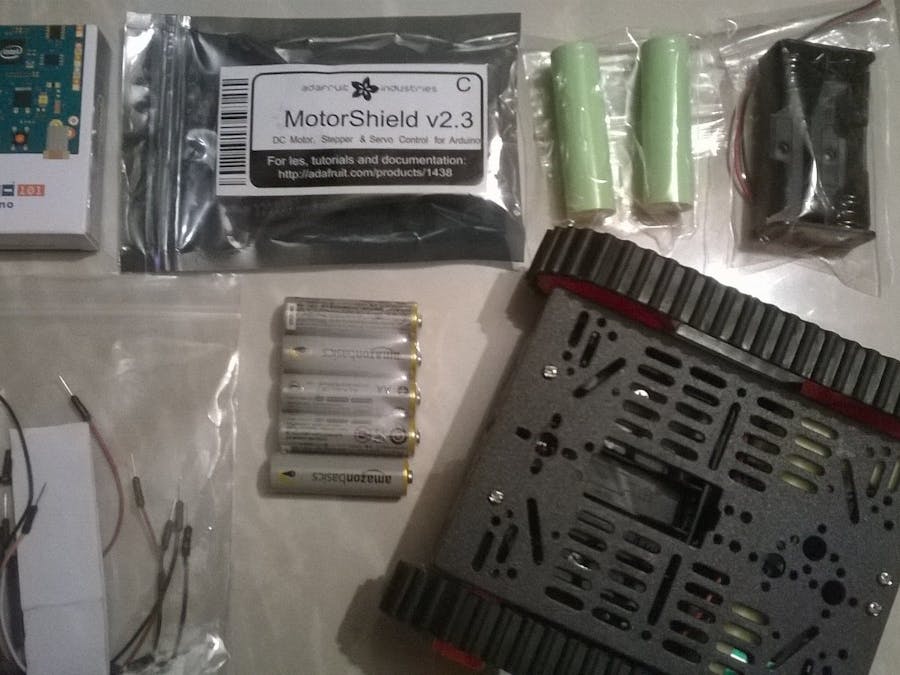
GUION (Una vez preparado todo el material según la lista)
- Montaremos el chasis
- Soldaremos y prepararemos el shield para el motor
- Prepararemos los packs de baterias
- Mecanizaremos la electrónica
- Programaremos la Intel Curie 101
- Instalaremos las nRF tool box en nuestro Android.
- Le daremos al Play
Al completar esta guia obtendrás el siguiente resultado :
El Chasis :Con un poco de arte en unos 30 minutos conseguiras tener montado el BOT
Sin mas dificultat con el soldador deberéis ensamblar/soldar las tiras de pines que vienen por separado dentro del a bolsa del shield.
El aspecto cuando termines debe asemejarse a:
Según podéis ver en la siguiente figura utilizando unos separadores atornillaremos los dos porta pilas, uno para albergar tres pilas AAA (4,5v) para alimentar la placa Intel y otro de 5 pilas AA (7,5v) para alimentar los motores.
Hemos aprovechado para montar dos interruptores para cada uno de los packs, de esa forma una vez cerrada la tapa y no necesitaremos abrir nuestro BOT para conectar/desconectar las baterías.
Montaremos justo a la plancha nuestro Intel Curie tal y como se muestra en la siguiente figura :
Seguidamente insertaremos el controlador de los motores
Y este será su aspecto, es importante observar que deberemos soldar los cables de alimentación de las baterías AAA a los pasantes libres indicados como (GND y 5V) del shield.
Luego conectaremos los motores al shield utilizando los latiguillos (macho/macho)... fijaros bien en la siguiente figura :
Ahora solo nos faltara cerrar la tapa y poner los tornillos para fijarla al resto del chasis.
Al terminar tendréis un clon de nuestro BOT 9000.
Desde el IDE de Arduino, necesitaras añadir la Intel Curie 101 y las librerías para la shield de Adafruit como sigue
A continuación nos descargaremos de github el código LabRobot del enlace que encontraras mas en el link referenciado en la sección de código.
Conectaremos nuestro cable usb a la genuino y descargaremos la aplicación.
En google play buscaremos/instalaremos nuestras nRF toolbox
Solo te faltara configurarlo el dashboard, para que cumpla con lo siguiente :
// List commands from nRF tools uart
- 1 - 25% of motor power HEX:31
- 2 - 50% of motor power HEX:32
- 3 - 75% of motor power HEX:33
- 4 - 100% of motor power HEX:34
- 5 - forward HEX:41
- 6 - left HEX:42
- 7 - stop HEX:43
- 8 - right HEX:44
- 9 - reverse HEX:45
Encender los interruptores y darle al play!!
COMO MOLA!!! :-) Espero que disfrutéis. Happy Hacking






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments