With this project you can make your own servo tester device. I made project with Arduino Nano which can test two servos at the same time. Project has automatic and manual testing mode. With potentiometer you can test servos manually. Also if you press the push button the servos will test automatically. This project usefull for who make projects with servos and works. Some broken servos can interrupt your project, especially if you are doing many projects related to servos. So with this project you can automatically or manually test your two servos at the same time. You need to solder components on the blank circuit board. Don't solder Arduino Nano directly on the blank board. Use female headers. Also I will add photos of under the circuit.
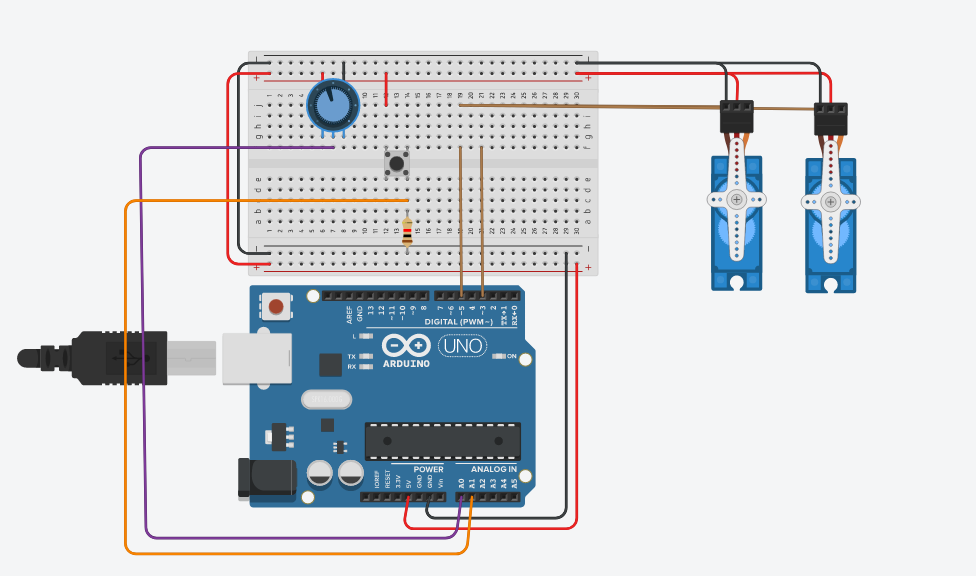
The device diagram as shown below:
The project video as shown below:











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments