I
I started this idea with a vision of creating an easily accessible cabinet for those in wheel chairs or with other physical disabilities.
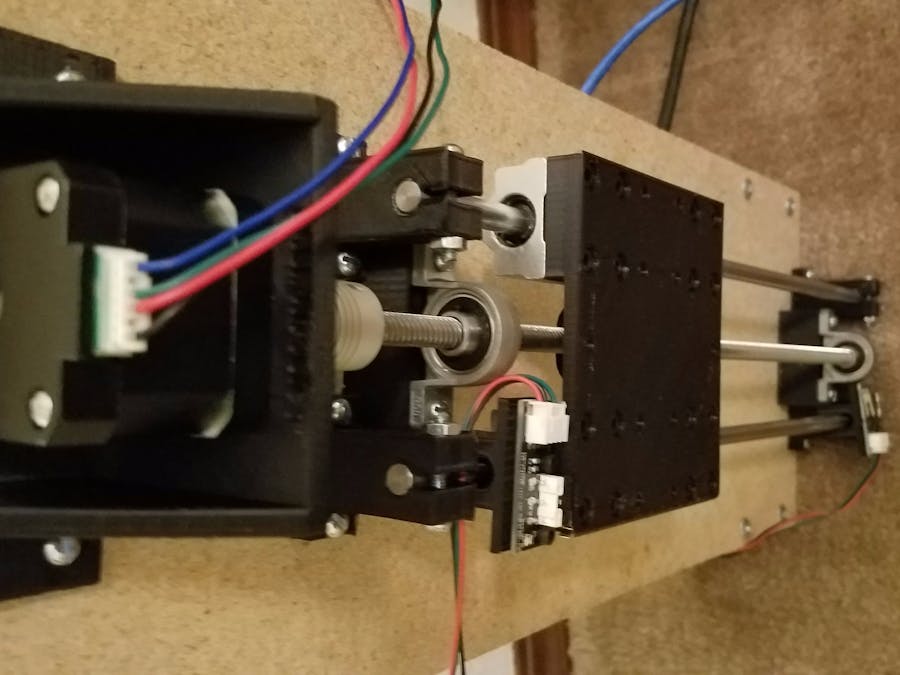
I came up with the idea to take a linear system and have it deliver straight through the bottom of the cabinet. My original idea was to incorporate a bluetooth control where the end user could simply choose which cabinet/item and press a button in their app to lower the items.
My goals were to create a modular system that can be build outside of the cabinet and modified to any size needed, and then installed into the cabinet.
My hope is that this system being open source will spur more development and make accessible systems available to anyone at low costs.
I have designed all the parts for this project that were 3d printed.
Next steps....
Design and print the platform/shelf that mounts to the gantry plate. This is the shelf that cabinet items will be lowered to end user on.
Design new case for electronics and mount
Look at bluetooth code and app instead of the momentary push buttons that I am using right now for operation of the unit.




_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












Comments