
Hardware components | ||||||
 |
| × | 1 | |||
This time we got a community project from Yannik Brändle. Yannik already has a collection of robots and streams them on letsrobot.tv. He was asked by the community if he could build a robot that launches a ping-pong ball, fetches it and launches the ball again. Yannik used our Pi Cap and Electric Paint to realise this request.
Step 1: Video
Links
Step 2:
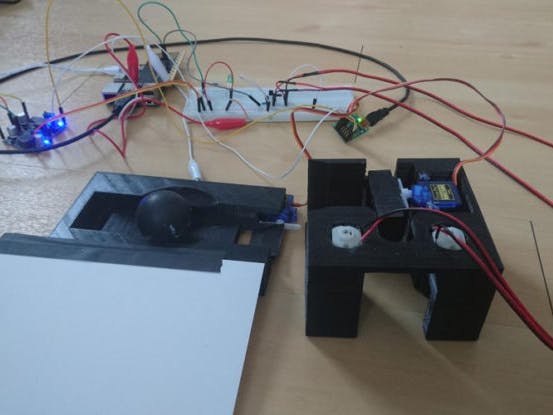
The first step was to build the accelerator head. For this, two DC motors were prepared with jumper wires and heat shrink tubes and everything was soldered together. These motors are used to accelerate the ball. A servo was included to push the ball into the turning DC Motors. The motors and servo were fitted inside a 3D printed frame.
The part that launches the ball includes another servo and pieces of aluminium. The aluminium is used as the sensor, it was attached to one of the electrodes of the Pi Cap. To start and stop the DC motors, a set of headers were soldered to the Pi Cap’s GPIO breakout. A status LED is also set via the Pi Cap’s GPIO output. In order for the ball to be sensed, it needed to be coated with Electric Paint.
Links
Step 3:
In the end, everything was connected together, using Step Downs to provide the necessary voltages for the motors and servos and a breadboard. Well done Yannik and thank you for sharing!
If you’d like to send us your own projects, feel free to email us at info@bareconductive.com or contact us on Instagram or Twitter.


Comments