/*
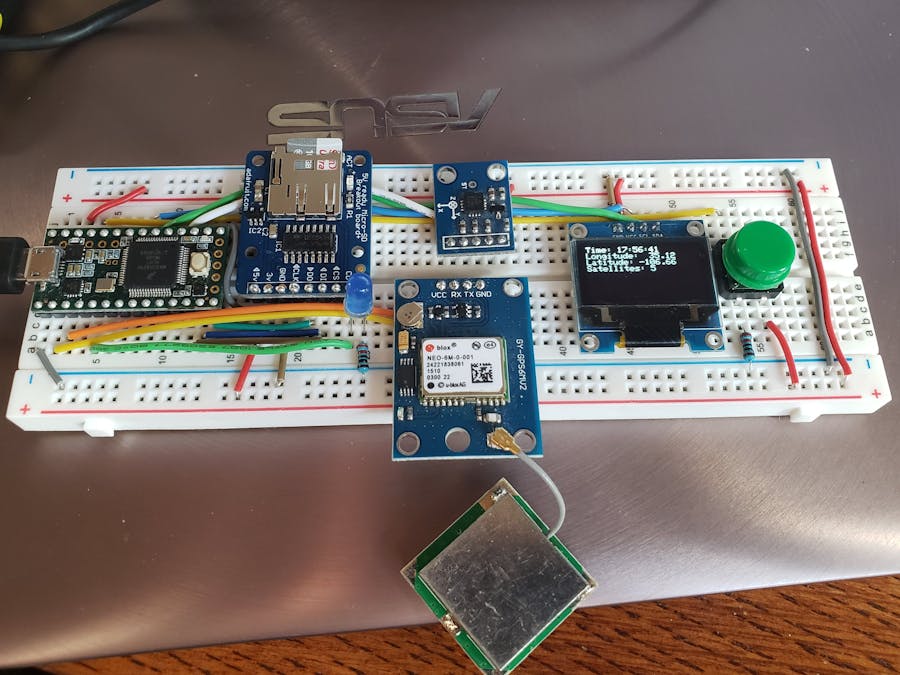
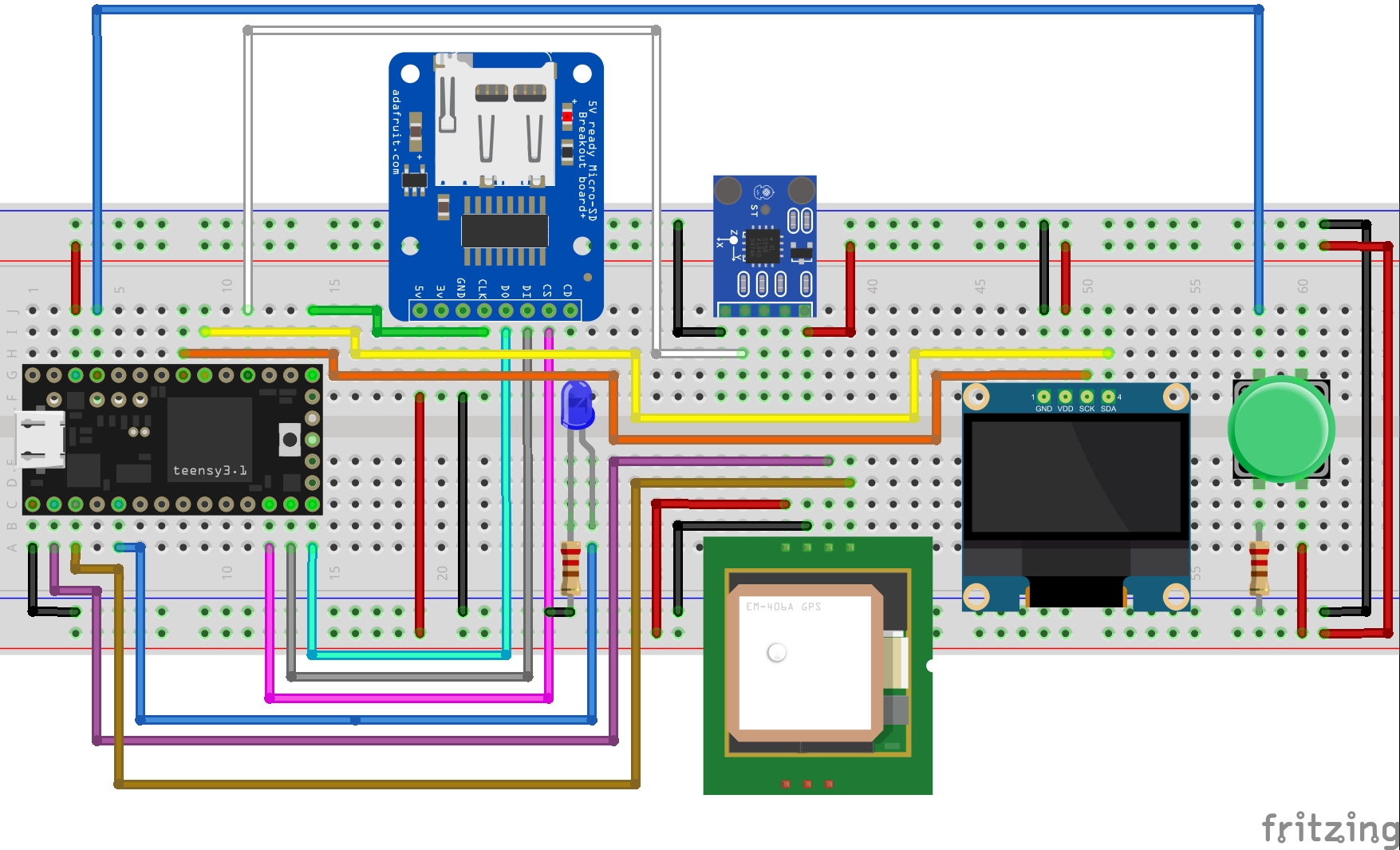
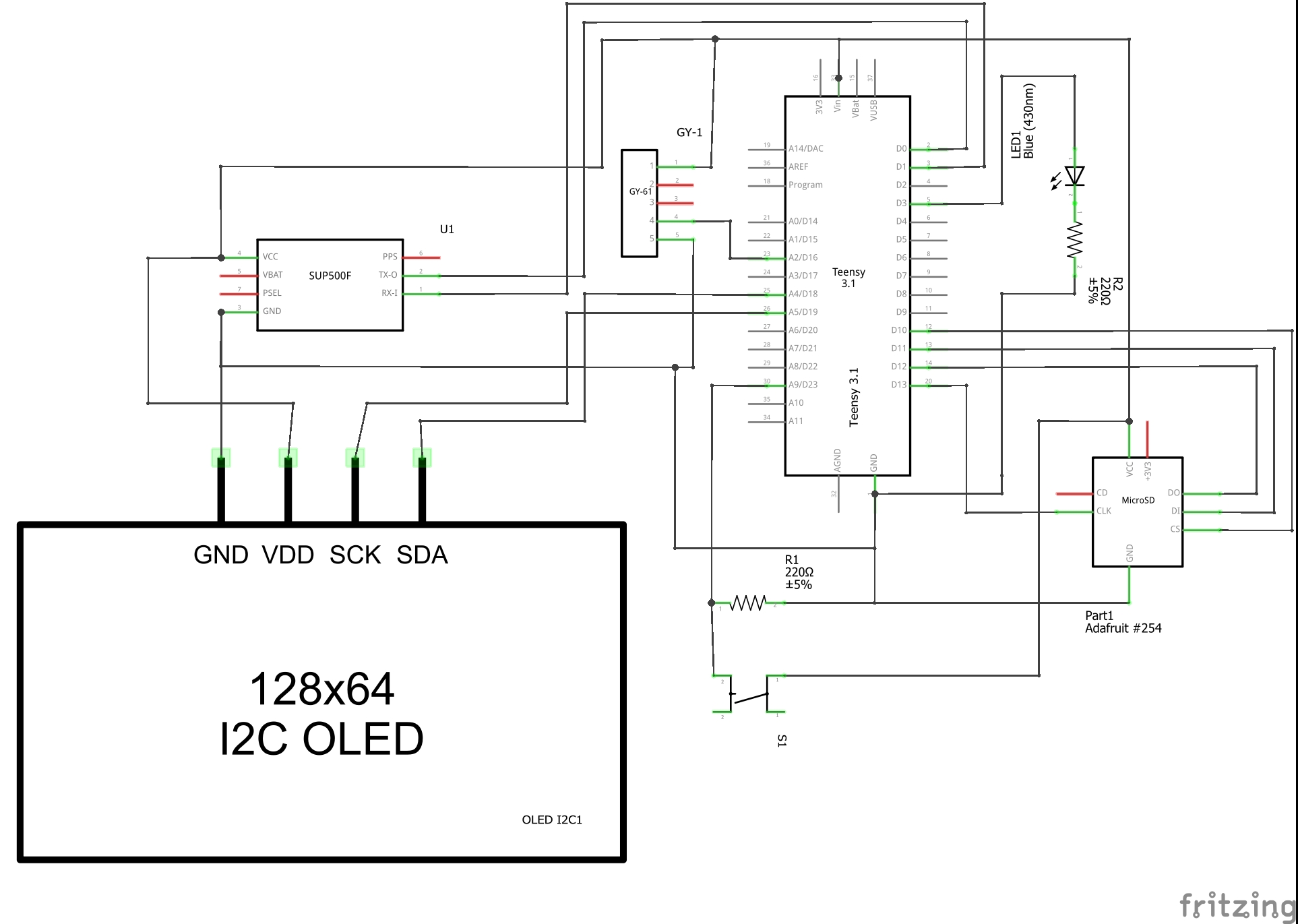
* Project: PotHole
* Description: Use GY-21 to detect pot holes, tag with GSP, and save to SD Card
* Author: Brian Rashap
* Date: 03-May-2020
*/
#include <TinyGPS.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Time.h>
#include <SPI.h>
#include <SdFat.h>
// Configure microSD
const int chipSelect = 10;
#define FILE_BASE_NAME "Data"
SdFat sd;
SdFile file;
const uint8_t BASE_NAME_SIZE = sizeof(FILE_BASE_NAME) - 1;
char fileName[13] = FILE_BASE_NAME "00.csv";
// Configure OLED Display
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
#define OLED_RESET 4 // Reset pin # (or -1 if sharing Arduino reset pin)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// Configure GPS
TinyGPS gps;
#define Uart Serial1
void gpsdump(TinyGPS &gps);
const int UTC_offset = -6; // Mountain Daylight Time
void printFloat(double f, int digits = 2);
// Declare Variables
int startPin=23;
int zPin=16;
int ledPin=3;
float zAcc;
float cal;
int i;
bool logStart;
void setup() {
Serial.begin(9600);
Uart.begin(9600);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
pinMode(startPin,INPUT);
pinMode(zPin,INPUT);
pinMode(ledPin,OUTPUT);
display.setTextSize(1);
display.setTextColor(SSD1306_WHITE);
display.clearDisplay();
// Calibrate Accelerometer
for(i=0;i<20;i++) {
cal += analogRead(zPin);
delay(250);
}
cal = cal / 20.0;
display.setCursor(0,0);
display.printf("Calibration = %0.2f",cal);
// Initialize microSD
if (!sd.begin(chipSelect, SD_SCK_MHZ(50))) {
sd.initErrorHalt();
}
if (BASE_NAME_SIZE > 6) {
Serial.println("FILE_BASE_NAME too long");
while(1);
}
// Get inital GPS
display.setCursor(0,16); // Start at top-left corner
display.println("GPS Acquiring");
display.display();
getGPS();
logStart = false;
Serial.println("Push button to begin");
}
void loop() {
logStart=digitalRead(startPin);
if (logStart==true) {
Serial.printf("Starting Data Logging \n");
digitalWrite(ledPin,HIGH);
while (sd.exists(fileName)) {
if (fileName[BASE_NAME_SIZE + 1] != '9') {
fileName[BASE_NAME_SIZE + 1]++;
} else if (fileName[BASE_NAME_SIZE] != '9') {
fileName[BASE_NAME_SIZE + 1] = '0';
fileName[BASE_NAME_SIZE]++;
} else {
Serial.println("Can't create file name");
while(1);
}
}
if (!file.open(fileName, O_WRONLY | O_CREAT | O_EXCL)) {
Serial.println("file.open");
file.printf("TimeStamp, Acceleration,Latitude-Longitude \n");
}
Serial.printf("Logging to: %s \n",fileName);
delay(1000); //give chance to release button
}
while(logStart==true) {
zAcc = analogRead(zPin)/cal;
if (zAcc > 1.1) {
Serial.printf("Z Acceleration = %0.2f \n",zAcc);
getGPS();
}
if (!file.sync() || file.getWriteError()) {
Serial.printf("write error");
}
logStart = !digitalRead(startPin);
if (logStart==false) {
file.close();
Serial.printf("Done \n");
digitalWrite(ledPin,LOW);
delay(2000);
Serial.printf("Ready for next data log \n");
}
}
}
void getGPS() {
bool newdata = false;
unsigned long start = millis();
Serial.println("Begin Acquire");
// Every 5 seconds we print an update
while (millis() - start < 5000) {
if (Uart.available()) {
char c = Uart.read();
Serial.print(c); // uncomment to see raw GPS data
if (gps.encode(c)) {
newdata = true;
//break; // uncomment to print new data immediately!
}
}
}
if (newdata) {
Serial.println("Acquired Data");
Serial.println("-------------");
gpsdump(gps);
Serial.println("-------------");
Serial.println();
}
}
void gpsdump(TinyGPS &gps)
{
long lat, lon;
float flat, flon;
unsigned long tage, tdate, ttime, chars;
int tyear;
byte tmonth, tday, thour, tminute, tsecond, hundredths;
unsigned short sentences, failed;
gps.get_position(&lat, &lon, &tage);
Serial.print("Lat/Long(10^-5 deg): "); Serial.print(lat); Serial.print(", "); Serial.print(lon);
Serial.print(" Fix age: "); Serial.print(tage); Serial.println("ms.");
gps.f_get_position(&flat, &flon, &tage);
Serial.print("Lat/Long(float): "); printFloat(flat, 7); Serial.print(", "); printFloat(flon, 7);
Serial.print(" Fix age: "); Serial.print(tage); Serial.println("ms.");
gps.get_datetime(&tdate, &ttime, &tage);
Serial.print("Date(ddmmyy): "); Serial.print(tdate); Serial.print(" Time(hhmmsscc): ");
Serial.print(ttime);
Serial.print(" Fix age: "); Serial.print(tage); Serial.println("ms.");
gps.crack_datetime(&tyear, &tmonth, &tday, &thour, &tminute, &tsecond, &hundredths, &tage);
Serial.print("Date: "); Serial.print(static_cast<int>(tmonth)); Serial.print("/");
Serial.print(static_cast<int>(tday)); Serial.print("/"); Serial.print(tyear);
Serial.print(" Time: "); Serial.print(static_cast<int>(thour)); Serial.print(":");
Serial.print(static_cast<int>(tminute)); Serial.print(":"); Serial.print(static_cast<int>(tsecond));
Serial.print("."); Serial.print(static_cast<int>(hundredths));
Serial.print(" Fix age: "); Serial.print(tage); Serial.println("ms.");
// Set Time from GPS data string
setTime(thour, tminute, tsecond, tday, tmonth, tyear);
// Calc current Time Zone time by offset value
adjustTime(UTC_offset * SECS_PER_HOUR);
time_t t=now();
Serial.print("Time: ");
Serial.print(hour(t));
Serial.print(":");
Serial.print(minute(t));
Serial.print(":");
if (second(t)<10) {
Serial.print("0");
}
Serial.println(second(t));
OLEDlonglat(flat,flon);
SDlonglat(zAcc,flon,flat);
Serial.print("Alt(cm): "); Serial.print(gps.altitude()); Serial.print(" Course(10^-2 deg): ");
Serial.print(gps.course()); Serial.print(" Speed(10^-2 knots): "); Serial.println(gps.speed());
Serial.print("Alt(float): "); printFloat(gps.f_altitude()); Serial.print(" Course(float): ");
printFloat(gps.f_course()); Serial.println();
Serial.print("Speed(knots): "); printFloat(gps.f_speed_knots()); Serial.print(" (mph): ");
printFloat(gps.f_speed_mph());
Serial.print(" (mps): "); printFloat(gps.f_speed_mps()); Serial.print(" (kmph): ");
printFloat(gps.f_speed_kmph()); Serial.println();
Serial.print("Satellites in view: ");
Serial.println(gps.satellites(), DEC);
gps.stats(&chars, &sentences, &failed);
Serial.print("Stats: characters: "); Serial.print(chars); Serial.print(" sentences: ");
Serial.print(sentences); Serial.print(" failed checksum: "); Serial.println(failed);
}
void OLEDlonglat(float longitude, float latitude) {
display.clearDisplay();
display.setCursor(0,0); // Start at top-left corner
time_t t=now(); // display time
display.print("Time: ");
display.print(hour(t));
display.print(":");
display.print(minute(t));
display.print(":");
if (second(t)<10) {
display.print("0");
}
display.println(second(t));
display.print("Longitude: "); display.println(longitude);
display.print("Latitude: "); display.println(latitude);
display.print("Satellites: "); display.println(gps.satellites(), DEC);
display.display();
}
void printFloat(double number, int digits)
{
// Handle negative numbers
if (number < 0.0) {
Serial.print('-');
number = -number;
}
// Round correctly so that print(1.999, 2) prints as "2.00"
double rounding = 0.5;
for (uint8_t i=0; i<digits; ++i)
rounding /= 10.0;
number += rounding;
// Extract the integer part of the number and print it
unsigned long int_part = (unsigned long)number;
double remainder = number - (double)int_part;
Serial.print(int_part);
// Print the decimal point, but only if there are digits beyond
if (digits > 0)
Serial.print(".");
// Extract digits from the remainder one at a time
while (digits-- > 0) {
remainder *= 10.0;
int toPrint = int(remainder);
Serial.print(toPrint);
remainder -= toPrint;
}
}
void SDlonglat(float acc, float plong, float plat) {
time_t t2=now();
Serial.printf("\n \n %i:%i:%i, %0.2f, %0.6f-%0.6f \n \n",hour(t2),minute(t2),second(t2),acc,plat,plong);
file.printf("%i:%i:%i, %0.2f, %0.6f Z %0.6f\n",hour(t2),minute(t2),second(t2),acc,plat,plong);
}







{kind=link}
{kind=link}
Comments