


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
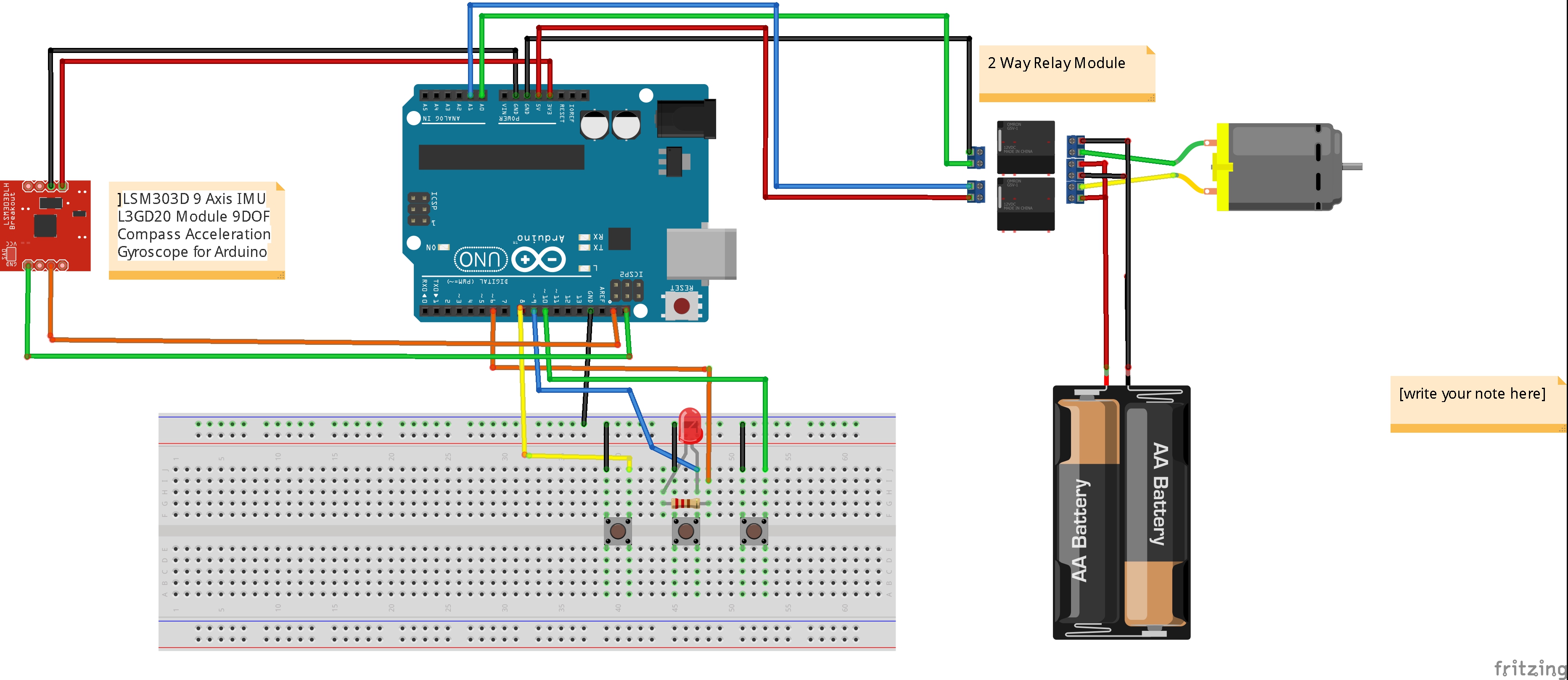
I sail a yacht that can be steered by an electronic device called a tiller pilot, which acts on the boats tiller.
The circuit board in my tiller pilot burned out, so I had to replace it. At about the same time my daughter bought me an Arduino Starter Kit.
I thought it would be easy to construct a new brains for my old tiller pilot.
It wasn't.
It has taken me over a year to get this far.
The tiller pilot has three buttons, i.e. port, ON/standby and starboard.
When the tiller pilot is powered up, the LED flashes indicating that the tiller pilot is in standby mode. Pressing either of the port and starboard buttons drives the boat in the desired direction. NO compass heading is maintained.
When the ON/standby button is pressed the LED stays ON continuously and the boat steers on the current course. Pressing either the port and starboard buttons changes the current couse by one degree, each time the button is pressed.
Pressing the ON/standby button again puts the unit back into standby mode.
Next, I will be looking at improving the accuracy of the unit by exploring proportional control.






{kind=link}
Comments