# -*- coding: utf-8 -*-
"""
Created on Tue Jun 25 09:14:58 2019
@author: Aula
"""
import rospy
from std_msgs.msg import String
import RPi.GPIO as GPIO
from Tkinter import *
window = Tk()
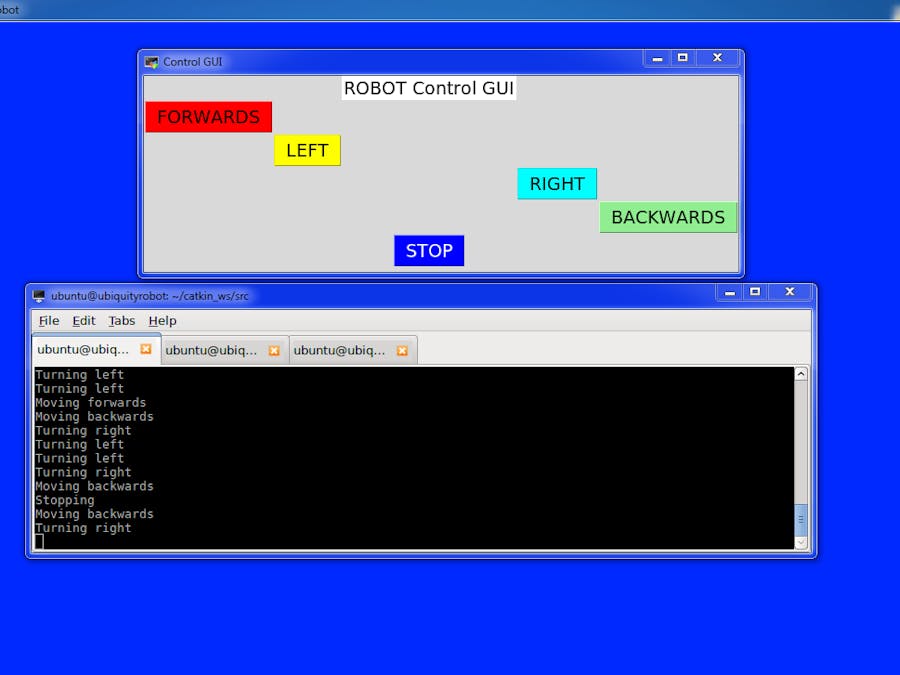
window.title("Control GUI")
lbl = Label(window, text="ROBOT Control GUI", font=("Arial Bold", 14),bg="white")
lbl.grid(column=5, row=0)
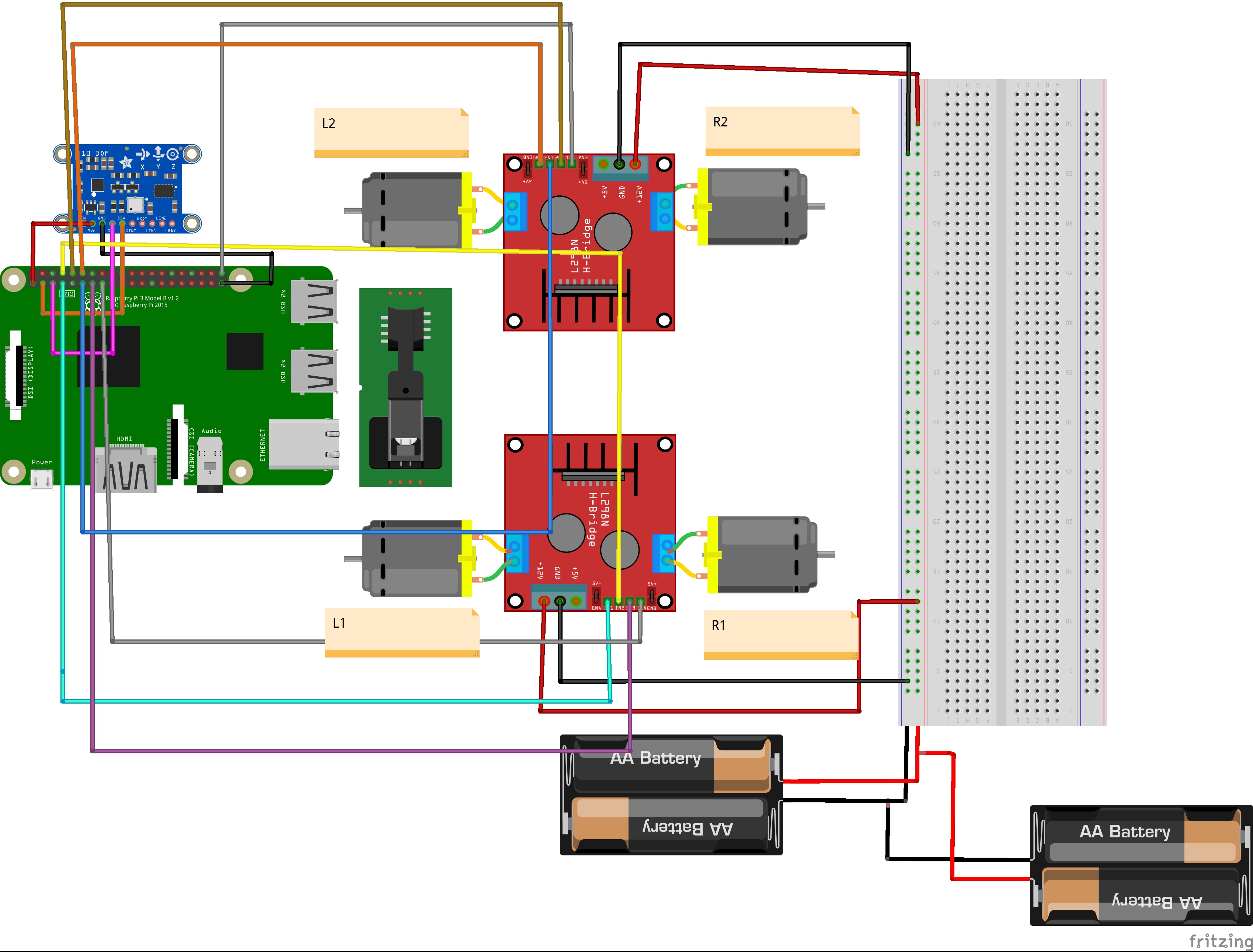
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
pinMotorAL1Forwards = 7
pinMotorAL1Backwards = 8
pinMotorBR1Forwards = 13
pinMotorBR1Backwards = 15
pinMotorAL2Forwards = 40
pinMotorAL2Backwards = 10
pinMotorBR2Forwards = 11
pinMotorBR2Backwards = 12
Frequency = 50
DutyCycle = 50
Stop = 0
GPIO.setup(7, GPIO.OUT)
GPIO.setup(8, GPIO.OUT)
GPIO.setup(15, GPIO.OUT)
GPIO.setup(13, GPIO.OUT)
GPIO.setup(11, GPIO.OUT)
GPIO.setup(12, GPIO.OUT)
GPIO.setup(10, GPIO.OUT)
GPIO.setup(40, GPIO.OUT)
pwm1 = GPIO.PWM(pinMotorAL1Forwards, Frequency)
pwm2 = GPIO.PWM(pinMotorAL1Backwards, Frequency)
pwm3 = GPIO.PWM(pinMotorBR1Forwards, Frequency)
pwm4 = GPIO.PWM(pinMotorBR1Backwards, Frequency)
pwm5 = GPIO.PWM(pinMotorAL2Forwards, Frequency)
pwm6 = GPIO.PWM(pinMotorAL2Backwards, Frequency)
pwm7 = GPIO.PWM(pinMotorBR2Forwards, Frequency)
pwm8 = GPIO.PWM(pinMotorBR2Backwards, Frequency)
pwm1.start(Stop)
pwm2.start(Stop)
pwm3.start(Stop)
pwm4.start(Stop)
pwm5.start(Stop)
pwm6.start(Stop)
pwm7.start(Stop)
pwm8.start(Stop)
def StopMotors():
print('Stopping')
pwm1.ChangeDutyCycle(Stop)
pwm2.ChangeDutyCycle(Stop)
pwm3.ChangeDutyCycle(Stop)
pwm4.ChangeDutyCycle(Stop)
pwm5.ChangeDutyCycle(Stop)
pwm6.ChangeDutyCycle(Stop)
pwm7.ChangeDutyCycle(Stop)
pwm8.ChangeDutyCycle(Stop)
def forwards():
print('Moving forwards')
pwm1.ChangeDutyCycle(DutyCycle)
pwm2.ChangeDutyCycle(Stop)
pwm3.ChangeDutyCycle(DutyCycle)
pwm4.ChangeDutyCycle(Stop)
pwm5.ChangeDutyCycle(DutyCycle)
pwm6.ChangeDutyCycle(Stop)
pwm7.ChangeDutyCycle(DutyCycle)
pwm8.ChangeDutyCycle(Stop)
def backwards():
print('Moving backwards')
pwm1.ChangeDutyCycle(Stop)
pwm2.ChangeDutyCycle(DutyCycle)
pwm3.ChangeDutyCycle(Stop)
pwm4.ChangeDutyCycle(DutyCycle)
pwm5.ChangeDutyCycle(Stop)
pwm6.ChangeDutyCycle(DutyCycle)
pwm7.ChangeDutyCycle(Stop)
pwm8.ChangeDutyCycle(DutyCycle)
def left():
print('Turning left')
pwm1.ChangeDutyCycle(20)
pwm2.ChangeDutyCycle(0)
pwm3.ChangeDutyCycle(70)
pwm4.ChangeDutyCycle(0)
pwm5.ChangeDutyCycle(70)
pwm6.ChangeDutyCycle(0)
pwm7.ChangeDutyCycle(20)
pwm8.ChangeDutyCycle(0)
def right():
print('Turning right')
pwm1.ChangeDutyCycle(70)
pwm2.ChangeDutyCycle(0)
pwm3.ChangeDutyCycle(20)
pwm4.ChangeDutyCycle(0)
pwm5.ChangeDutyCycle(20)
pwm6.ChangeDutyCycle(0)
pwm7.ChangeDutyCycle(70)
pwm8.ChangeDutyCycle(0)
btn1 = Button(window, text="FORWARDS",font=("Arial Bold", 14),bg="red", command= forwards)
btn1.grid(column=2, row=2)
btn2 = Button(window, text="LEFT",font=("Arial Bold", 14),bg="yellow", command= left)
btn2.grid(column=4, row=4)
btn3 = Button(window, text="RIGHT",font=("Arial Bold", 14),bg="cyan",command= right)
btn3.grid(column=6, row=6)
btn4 = Button(window, text="BACKWARDS",font=("Arial Bold", 14),bg="light green",command= backwards)
btn4.grid(column=8, row=8)
btn5 = Button(window, text="STOP",font=("Arial Bold", 14),fg="white",bg="blue", command= StopMotors)
btn5.grid(column=5, row=10)
window.mainloop()
def CommandCallback(commandMessage):
command = commandMessage.data
if command == 'forwards':
forwards()
elif command == 'backwards':
backwards()
elif command == 'left':
left()
elif command == 'right':
right()
elif command == 'StopMotors':
StopMotors()
else:
print('Unknown command, stopping instead')
StopMotors()
rospy.init_node('driver')
rospy.Subscriber('command', String, CommandCallback)
rospy.spin()
print('Shutting down: stopping motors')
StopMotors()

















{kind=link}
Comments