In this project, when a lidar sensor detect an object in front of it (eg -car), the tollbooth opens (controlled with a servo motor).
First with the lidar, you check the distance and if the distance is lesser than 30cm(you can change the value), the tollbooth will open and let a car pass. If there is no car, the tollbooth closes as you saw above in the video.
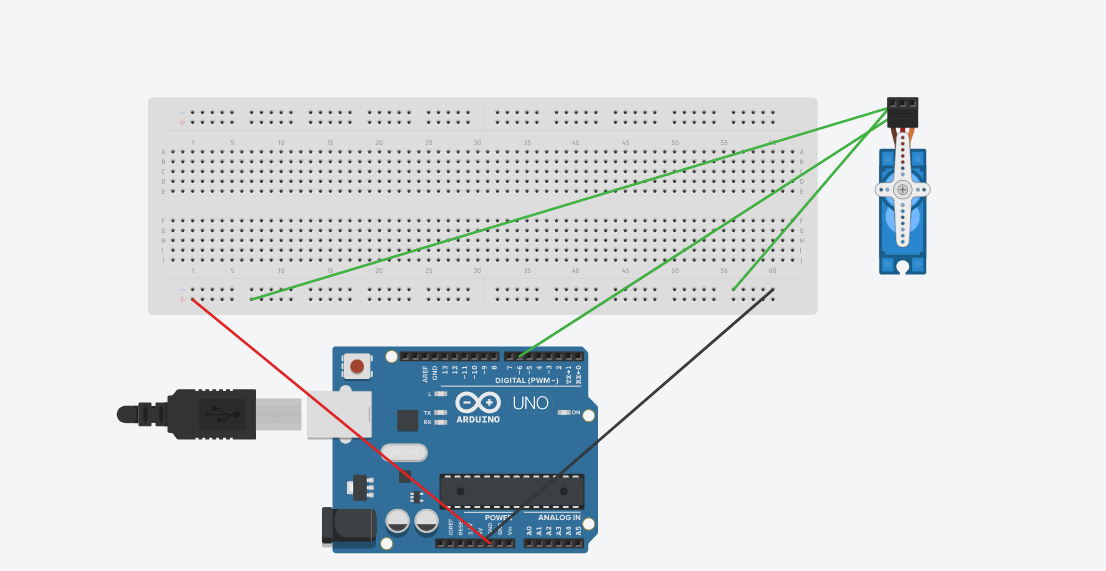
I connected the servo motor and the lidar sensor to the arduino using a sensor shield. You stick the servo motor on any box/book with a suitable height (Don'tstickittoohighfromthegroundinsuchawaythatthecarscan pass under it even when it is closed).


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
Comments