5-DOF Robotic Arm (Arduino + PCA9685)This project showcases a fully functional 5 Degrees-of-Freedom robotic arm built using an Arduino controller, the PCA9685 hardware PWM driver, and standard hobby servos. It is designed to be affordable, easy to build, and suitable for students, hobbyists, and anyone learning robotics, kinematics, and embedded systems.
OverviewThe robotic arm includes five independent joints: base rotation, shoulder, elbow, wrist movement, and a gripper. The PCA9685 PWM driver ensures smooth and precise servo control without overloading the microcontroller. The design focuses on mechanical stability, smooth motion, and expandability for more advanced use cases.
Features- Five Degrees of Freedom enabling flexible movement
- Smooth and accurate servo control using PCA9685
- Arduino-based controller for easy programming
- Adjustable speed and motion profile
- Supports serial or Bluetooth-based control (optional)
Hardware Used- Arduino Uno, Nano, or Mega
- PCA9685 16-channel PWM driver
- Hobby servos (MG996R, SG90, DS3218 or suitable alternatives)
- 5V/6V servo power supply
- Jumper wires, screws, and mounting base
Software- Arduino IDE
- PCA9685 servo driver library
- Custom movement functions for smooth transitions
- Optional Bluetooth or serial-based control interface
How It WorksThe Arduino communicates with the PCA9685 over I2C and sends angle commands to each servo. The PCA9685 generates stable PWM signals, allowing the arm to move smoothly and precisely. Motion interpolation prevents sudden jerks and improves stability. The mechanical design ensures that loads are distributed to reduce servo strain.
Mechanical DesignThe arm is made of lightweight 3D-printed parts. Key joints are reinforced for durability, and the geometry is optimized to balance torque requirements. The gripper is designed to hold small objects securely and can be adjusted for various tasks.
Applications- Automation and pick-and-place experiments
- Educational robotics
- Embedded systems practice
- Prototyping for AI/vision-based control
- Mechatronics learning projects
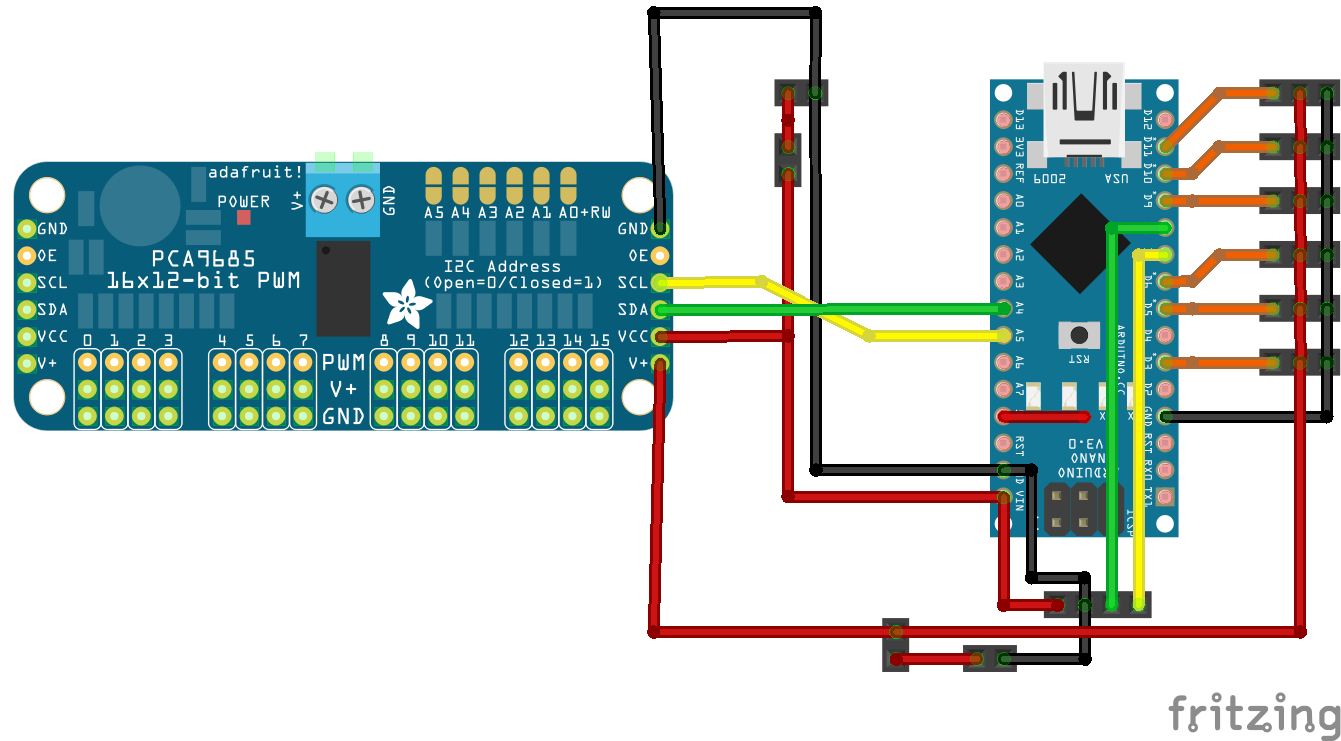
Wiring Summary- PCA9685 signal outputs connect to servo control wires
- External 5V/6V supply powers all servos
- Arduino 5V powers the PCA9685 logic
- SDA and SCL connect Arduino to PCA9685 (I2C)
- All grounds must be connected together
Future Improvements- Addition of inverse kinematics
- ROS or ROS2 integration
- Vision-based target tracking
- Closed-loop servo control using feedback sensors
- Automatic calibration routines
ConclusionThis 5-DOF robotic arm serves as an excellent platform for learning robotics concepts, servo mechanics, and embedded systems. It is modular, low-cost, and easy to extend, making it a great choice for beginners as well as advanced users exploring more complex automation systems.














{kind=link}
Comments