//L293D
//Motor A
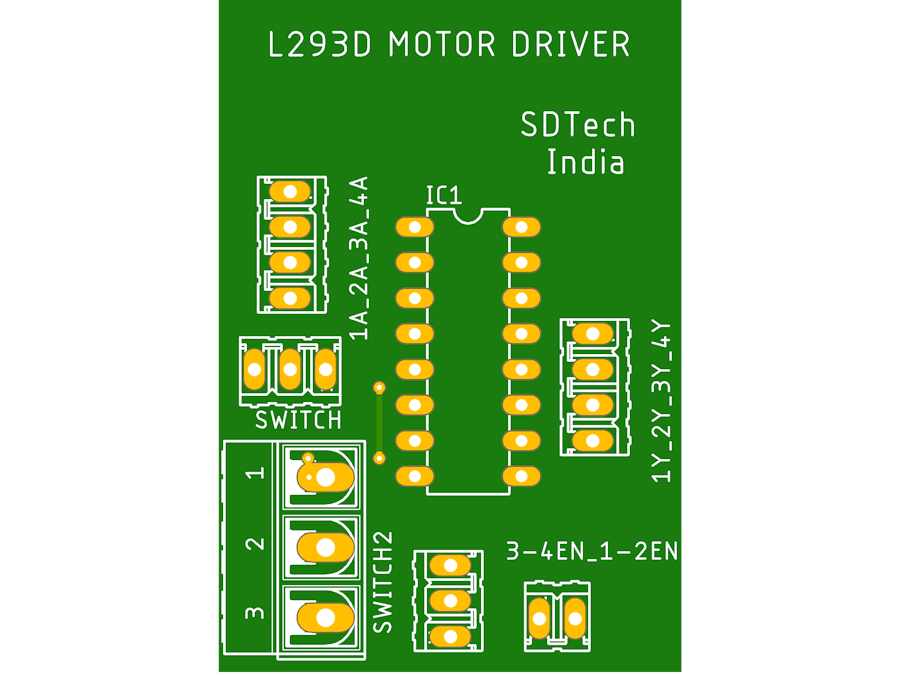
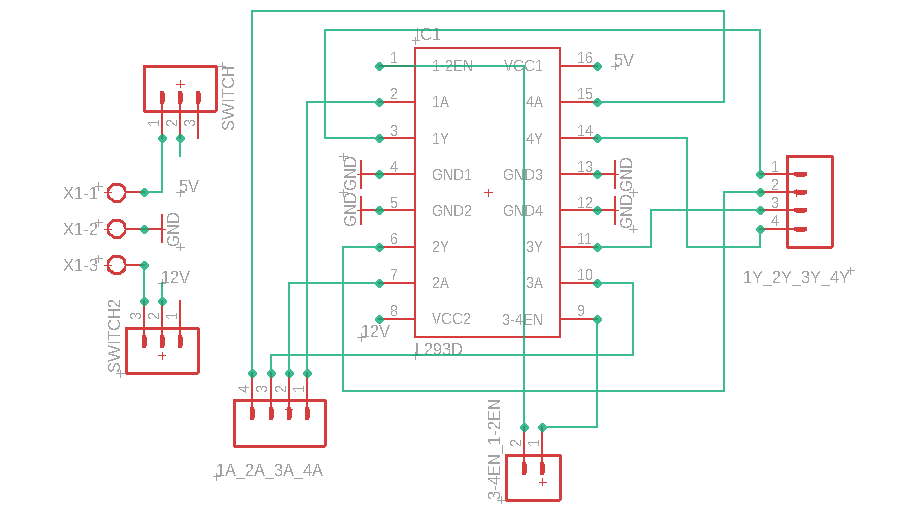
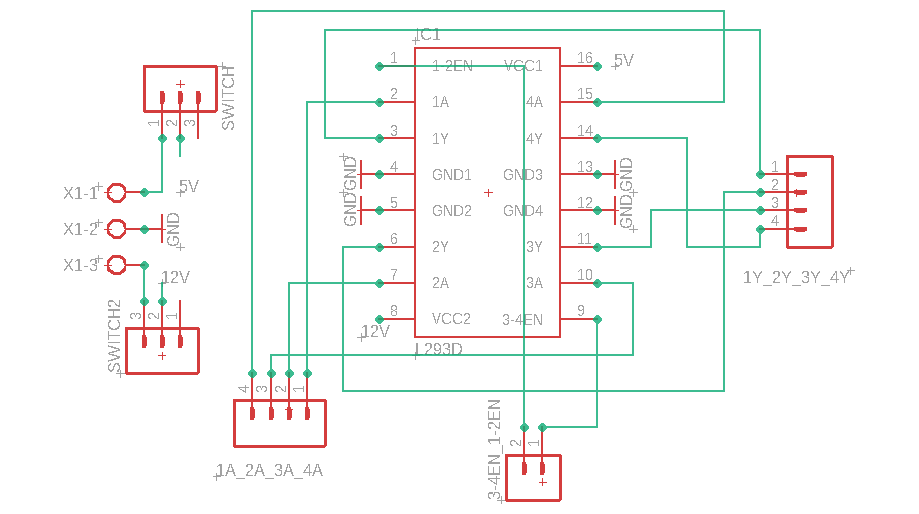
const int motorPin1 = 5; // Pin 14 of L293
const int motorPin2 = 6; // Pin 10 of L293
//Motor B
const int motorPin3 = 10; // Pin 7 of L293
const int motorPin4 = 9; // Pin 2 of L293
//This will run only one time.
void setup(){
//Set pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
//Motor Control - Motor A: motorPin1,motorpin2 & Motor B: motorpin3,motorpin4
//This code will turn Motor A clockwise for 2 sec.
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(2000);
//This code will turn Motor A counter-clockwise for 2 sec.
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(2000);
//This code will turn Motor B clockwise for 2 sec.
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(2000);
//This code will turn Motor B counter-clockwise for 2 sec.
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(2000);
//And this code will stop motors
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}
void loop(){
}













_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments