

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
| ||||||
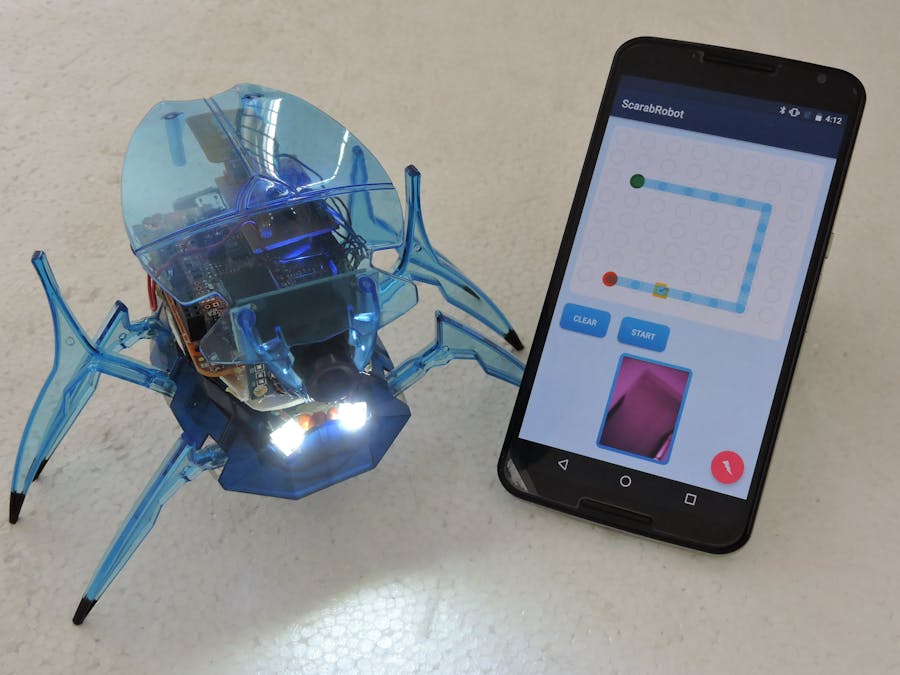
NXP Scarab Robot
Its just a robot can be configured to do specific or routine tasks. The tasks are configure through smart mobile via NTAG interface. And the task results will be stored in the same NTAG.
The Task can be anything , reading temperature /pressure/capturing pictures or motion detection. In this project the task is capturing the picture.I used OV7670 VGA camera at 160x120 resolution with Flexio Ports.
FRDM-K82F Board got it from hackster.io And interfaced with NTAG I2c Plus board , OV7670 and L293D H bridge driver. Purchased Scarab XL Hexbug from online store and established the connections between L293D and DC motors. Also connected LEDs in Scarab.
Android application is for configuring the scarab and it is developed using Android studio. Using of this App the user can define a path for maneuvering the scrab. Its similar like my sketch drive car. In addition the user can set the task location in the maneuver path. The app also can be connect to Bluetooth module (HC-05) for reading Image data from Serial Flash (K82F Board has external Flash of 64MB).
The RGB led's are used for indication scarab status.
Blue - Idle state
Green - Active state
Cyan - Moving State
Blue/Green - Blinking (Reading Data)
Red - Not used
Tapping a mobile with NTAG, will download the configuration into Scarab (K82F). And after that trigger (Tap again with trigger button) starts the Scarab to move on the configured path direction. And it stops at Task location , after completing the task it resumes from there and stops at destination. At this stage the user can read data from NTAG or via Bluetooth.The features can be extended by connecting scarab to internet (ESP8266 - I have tested this but not used here due to large data size Image). The results can be read from anywhere.
some use-cases are like,
Home security - Scarab robots replacement for dogs or watchman
Monitoring & Automation - It can do a lot in agriculture & Industries (with cloud)
Military- It also can be used in Military.
Scarab Robot Demo Video
(Note :- The picture was taken at night time, was not visible clearly)
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include "flexio_ov7670.h"
#include "fsl_device_registers.h"
#include "fsl_debug_console.h"
#include "board.h"
#include "math.h"
#include "fsl_i2c.h"
#include "fsl_fxos.h"
#include "fsl_port.h"
#include "pin_mux.h"
#include "clock_config.h"
#include "fsl_lpuart.h"
#include "flexio_ov7670.h"
#include "qflash.h"
#include "ntag.h"
#include "i2c.h"
#include "fsl_ftm.h"
#define BOARD_RLED_GPIO BOARD_LED_RED_GPIO
#define BOARD_RLED_GPIO_PIN BOARD_LED_RED_GPIO_PIN
#define BOARD_GLED_GPIO BOARD_LED_GREEN_GPIO
#define BOARD_GLED_GPIO_PIN BOARD_LED_GREEN_GPIO_PIN
#define BOARD_BLED_GPIO BOARD_LED_BLUE_GPIO
#define BOARD_BLED_GPIO_PIN BOARD_LED_BLUE_GPIO_PIN
#define DEMO_LPUART LPUART1
#define DEMO_LPUART_CLKSRC kCLOCK_Osc0ErClk
#define ECHO_BUFFER_LENGTH 8
/* The Flextimer instance/channel used for board */
#define BOARD_FTM_BASEADDR FTM3
#define BOARD_FIRST_FTM_CHANNEL 2U
#define BOARD_SECOND_FTM_CHANNEL 3U
/* Get source clock for FTM driver */
#define FTM_SOURCE_CLOCK CLOCK_GetFreq(kCLOCK_BusClk)
#define MOTOR1_A 1U
#define MOTOR1_B 3U
#define MOTOR2_A 2U
#define MOTOR2_B 4U
#define LIGHT_LED 5U
#define TASK_TIME 10
extern void FLEXIO_Ov7670AsynCallback(void);
void move_left();
void move_right();
void stop();
void move_forward();
void run_scarab();
void transfer_image();
void run_task();
void delay_ms(int dly);
/*!
* @brief Release I2C bus
*
*/
void BOARD_I2C_ReleaseBus(void);
/* LPUART user callback */
void LPUART_UserCallback(LPUART_Type *base, lpuart_handle_t *handle, status_t status, void *userData);
uint8_t ch1_wkey[] = "REN0SEZYDCCP9Q0A";
uint8_t ch1_rkey[] = "O6CT79WHV3HO3DZW";
uint8_t esp_mux_en[] = "AT+CIPMUX=1\r\n";
uint8_t esp_connect[] = "AT+CIPSTART=1,\"TCP\",\"184.106.153.149\",80\r\n";
uint8_t esp_set_length[] = "AT+CIPSEND=1,56\r\n";
uint8_t esp_send_data[] = "GET /update?key=REN0SEZYDCCP9Q0A&field1=000000\r\n";
uint8_t esp_clear_data[] = "DELETE /channels/131534/feeds.json?key=D73U8I5DB5LO01HV\r\n";
uint8_t g_rxBuffer[64] = {0};
/*******************************************************************************
* Variables
******************************************************************************/
uint8_t ntag_header[16];
uint8_t ntag_path[128];
bool IsMoving = false;
extern i2c_master_handle_t g_m_handle;
/* FXOS device address */
const uint8_t g_accel_address[] = {0x1CU, 0x1DU, 0x1EU, 0x1FU};
uint8_t turn_plus=0;
int16_t xData = 0;
int16_t yData = 0;
int16_t xAngle = 0;
int16_t yAngle = 0;
int16_t pxAngle = 0;
int16_t pyAngle = 0;
lpuart_handle_t g_lpuartHandle;
uint8_t string_scarab_idle[] = "Scarab is Idle \r\n";
uint8_t string_scarab_active[] = "Scarab is Active \r\n";
uint8_t string_scarab_locked[] = "Scarab is Locked \r\n";
uint8_t string_LF[] = "\r\n";
uint8_t g_txString2[] = {'0','1','2','3','4','5','6','7','8','9'};
extern volatile uint8_t g_FlexioCameraFrameBuffer[OV7670_FRAME_BYTES];
/* Whether the SW button is pressed */
volatile bool module_enable = false;
volatile bool rxBufferEmpty = true;
volatile bool txBufferFull = false;
volatile bool txOnGoing = false;
volatile bool rxOnGoing = false;
volatile bool lights_on = false;
extern volatile bool flashOnGoing = false;
extern volatile bool isFinished = false;
uint8_t g_txBuffer[1024] = {0};
/*******************************************************************************
* Code
******************************************************************************/
void PORTB_IRQHandler(void)
{
/* Clear the interrupt flag for PTB2 */
PORT_ClearPinsInterruptFlags(PORTB, 1U << BOARD_FLEXIO_VSYNC_PIN_INDEX);
FLEXIO_Ov7670AsynCallback();
}
/* LPUART user callback */
void LPUART_UserCallback(LPUART_Type *base, lpuart_handle_t *handle, status_t status, void *userData)
{
userData = userData;
if (kStatus_LPUART_TxIdle == status)
{
txBufferFull = false;
txOnGoing = false;
}
if (kStatus_LPUART_RxIdle == status)
{
rxBufferEmpty = false;
rxOnGoing = false;
}
}
/* Delay n ms */
void DelayMs(uint8_t n)
{
SysTick->CTRL |= SysTick_CTRL_CLKSOURCE_Msk; /* use core clock */
SysTick->CTRL &= ~SysTick_CTRL_TICKINT_Msk; /* disable interrupt */
SysTick->LOAD = n * ((CLOCK_GetFreq(kCLOCK_CoreSysClk)) / 1000U); /* n ms */
SysTick->VAL = 0U; /* clear COUNTFLAG */
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
/* wait for timeout */
while (0U == (SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk))
{
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
uint32_t write_status=0;
lpuart_transfer_t xfer;
int main(void) {
uint32_t i,j;
uint8_t regResult = 0;
uint8_t array_addr_size = 0;
lpuart_config_t config;
gpio_pin_config_t cam_pinConfig;
ftm_config_t ftmInfo;
uint8_t updatedDutycycle = 0U;
ftm_chnl_pwm_signal_param_t ftmParam[2];
/* Configure ftm params with frequency 24kHZ */
ftmParam[0].chnlNumber = (ftm_chnl_t)BOARD_FIRST_FTM_CHANNEL;
ftmParam[0].level = kFTM_LowTrue;
ftmParam[0].dutyCyclePercent = 0U;
ftmParam[0].firstEdgeDelayPercent = 0U;
ftmParam[1].chnlNumber = (ftm_chnl_t)BOARD_SECOND_FTM_CHANNEL;
ftmParam[1].level = kFTM_LowTrue;
ftmParam[1].dutyCyclePercent = 0U;
ftmParam[1].firstEdgeDelayPercent = 0U;
/* Define the init structure for the output LED pin */
gpio_pin_config_t led_config = {
kGPIO_DigitalOutput, 0,
};
BOARD_InitPins();
BOARD_BootClockRUN();
BOARD_InitDebugConsole();
CLOCK_SetClkOutClock(0x06);
#if 1
/* Init output LED GPIO. */
// GPIO_PinInit(BOARD_RLED_GPIO, BOARD_RLED_GPIO_PIN, &led_config);
GPIO_PinInit(BOARD_GLED_GPIO, BOARD_GLED_GPIO_PIN, &led_config);
GPIO_PinInit(BOARD_BLED_GPIO, BOARD_BLED_GPIO_PIN, &led_config);
#endif
#if 1
/* Init output MOTOR GPIO. */
GPIO_PinInit(BOARD_MOTOR_GPIO, MOTOR1_A, &led_config);
//GPIO_PinInit(BOARD_MOTOR_GPIO, MOTOR1_B, &led_config);
//GPIO_PinInit(BOARD_MOTOR_GPIO, MOTOR2_A, &led_config);
GPIO_PinInit(BOARD_MOTOR_GPIO, MOTOR2_B, &led_config);
GPIO_PinInit(BOARD_LIGHT_GPIO, LIGHT_LED, &led_config);
#endif
#if 1
/* enable OV7670 Reset output */
cam_pinConfig.pinDirection = kGPIO_DigitalOutput;
cam_pinConfig.outputLogic = 1U;
GPIO_PinInit(GPIOC, 8U, &cam_pinConfig);
#endif
LPUART_GetDefaultConfig(&config);
config.enableTx = true;
config.enableRx = true;
LPUART_Init(DEMO_LPUART, &config, CLOCK_GetFreq(DEMO_LPUART_CLKSRC));
LPUART_TransferCreateHandle(DEMO_LPUART, &g_lpuartHandle, LPUART_UserCallback, NULL);
FTM_GetDefaultConfig(&ftmInfo);
/* Initialize FTM module */
FTM_Init(BOARD_FTM_BASEADDR, &ftmInfo);
FTM_SetupPwm(BOARD_FTM_BASEADDR, ftmParam, 2U, kFTM_EdgeAlignedPwm, 24000U, FTM_SOURCE_CLOCK);
FTM_StartTimer(BOARD_FTM_BASEADDR, kFTM_SystemClock);
/* Start PWM mode with updated duty cycle */
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)BOARD_FIRST_FTM_CHANNEL, kFTM_EdgeAlignedPwm,
100);
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)BOARD_SECOND_FTM_CHANNEL, kFTM_EdgeAlignedPwm,
100);
/* Software trigger to update registers */
FTM_SetSoftwareTrigger(BOARD_FTM_BASEADDR, true);
//PRINTF("ScarabRobot project\n");
#if 1
// GPIO_SetPinsOutput(BOARD_GLED_GPIO, 1U << BOARD_GLED_GPIO_PIN);
//GPIO_SetPinsOutput(BOARD_RLED_GPIO, 1U << BOARD_RLED_GPIO_PIN);
GPIO_ClearPinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
GPIO_SetPinsOutput(BOARD_GLED_GPIO, 1U << BOARD_GLED_GPIO_PIN);
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
#if 1
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_B);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_B);
// GPIO_ClearPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
i2c_init();
//Flash Mem Init
qflash_init();
/* Enable Quad mode for the flash */
enable_quad_mode();
qspi_read(read_flashbuf1, 0x68000000, 1024);
// write_ntag_data(write_buffer,16);
/*
ntag_header[0]=0x00;
ntag_header[1]=0x00;
ntag_header[2]=0x00;
write_ntag_header(ntag_header);
*/
while(1){
read_ntag_header(ntag_header);
if(ntag_header[0]==0x01){
GPIO_ClearPinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
GPIO_ClearPinsOutput(BOARD_GLED_GPIO, 1U << BOARD_GLED_GPIO_PIN);
read_ntag_data(ntag_path,128);
#if 0
xfer.data = ntag_path;
xfer.dataSize = sizeof(ntag_path);
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
#endif
run_scarab();
ntag_header[0]=0x00;
write_ntag_header(ntag_header);
}
if(ntag_header[2]==0x01){
lights_on = true;
GPIO_ClearPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
}else{
lights_on =false;
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
}
switch(ntag_header[1]){
case 0x00:
/*
xfer.data = string_scarab_idle;
xfer.dataSize = sizeof(string_scarab_idle);
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
Wait send finished
while (txOnGoing)
{
}
*/
GPIO_ClearPinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
GPIO_SetPinsOutput(BOARD_GLED_GPIO, 1U << BOARD_GLED_GPIO_PIN);
for(i=0;i<128;i++){
ntag_path[i]=0x00;
}
break;
case 0x01:
/*
xfer.data = string_scarab_active;
xfer.dataSize = sizeof(string_scarab_active);
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
Wait send finished
while (txOnGoing)
{
}
*/
GPIO_SetPinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
GPIO_ClearPinsOutput(BOARD_GLED_GPIO, 1U << BOARD_GLED_GPIO_PIN);
break;
case 0x02:
transfer_image();
ntag_header[1]=0x00;
write_ntag_header(ntag_header);
break;
}
#if 0
/* Get new accelerometer data. */
FXOS_ReadSensorData(&fxosHandle, &sensorData);
/* Get the X and Y data from the sensor data structure.fxos_data */
xData = (int16_t)((uint16_t)((uint16_t)sensorData.accelXMSB << 8) | (uint16_t)sensorData.accelXLSB);
yData = (int16_t)((uint16_t)((uint16_t)sensorData.accelYMSB << 8) | (uint16_t)sensorData.accelYLSB);
/* Convert raw data to angle (normalize to 0-90 degrees). No negative angles. */
xAngle = (int16_t)floor((double)xData * 0.011);
if (xAngle < 0)
{
xAngle *= -1;
}
yAngle = (int16_t)floor((double)yData * 0.011);
if (yAngle < 0)
{
yAngle *= -1;
}
if( (xAngle - pxAngle) > 3 || (pxAngle - xAngle) > 3){
IsMoving = true;
}
else{
IsMoving = false;
}
#endif
DelayMs(250);
DelayMs(250);
DelayMs(250);
DelayMs(250);
}
for(;;) { /* Infinite loop to avoid leaving the main function */
__asm("NOP"); /* something to use as a breakpoint stop while looping */
}
}
void run_scarab(){
int i;
int task_time = 10;
int step_time = 100;
delay_ms(10);
for(i=0;i<128;i++){
switch(ntag_path[i]){
case 0x00:
#if 0
xfer.data = "stop\n";
xfer.dataSize = sizeof("stop\n");
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
#endif
if(!lights_on)
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
step_time =100;
turn_plus =0;
stop();
i=128;
break;
case 0x01:
#if 0
xfer.data = "fwd\n";
xfer.dataSize = sizeof("fwd\n");
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
#endif
step_time =100;
turn_plus =0;
if(!lights_on)
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
move_forward();
break;
case 0x03:
#if 0
xfer.data = "right\n";
xfer.dataSize = sizeof("right\n");
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
#endif
step_time =60;
turn_plus =40;
if(!lights_on)
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
move_left();
break;
case 0x04:
#if 0
xfer.data = "left\n";
xfer.dataSize = sizeof("left\n");
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
#endif
step_time =60;
turn_plus =40;
if(!lights_on)
GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
move_right();
break;
case 0x11:
stop();
GPIO_ClearPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
BOARD_I2C_ReleaseBus();
BOARD_I2C_ReConfig();
FLEXIO_Ov7670Init();
FLEXIO_Ov7670StartCapture(1);
DelayMs(255);
DelayMs(255);
BOARD_I2C_ReleaseBus();
BOARD_I2C_ReConfig();
i2c_reset();
copytoflash(0,g_FlexioCameraFrameBuffer);
break;
}
delay_ms(task_time);
}
}
void transfer_image(){
uint32_t i,j;
for(i=0;i<38400;i++){
#if 1
if(g_FlexioCameraFrameBuffer[i]==0x0D)
g_FlexioCameraFrameBuffer[i] = 0x0E;
else
continue;
#endif
// g_FlexioCameraFrameBuffer[i]=05;
}
for(i=0;i<12;i++){
xfer.data = &g_FlexioCameraFrameBuffer[i*3200];
xfer.dataSize = 3200;
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
GPIO_TogglePinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
DelayMs(100);
}
xfer.data = string_LF;
xfer.dataSize = 2;
txOnGoing = true;
LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &xfer);
/* Wait send finished */
while (txOnGoing)
{
}
GPIO_ClearPinsOutput(BOARD_BLED_GPIO, 1U << BOARD_BLED_GPIO_PIN);
}
void move_left(){
#if 1
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_A);
/* Start PWM mode with updated duty cycle */
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR1_B, kFTM_EdgeAlignedPwm,
3);
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR2_A, kFTM_EdgeAlignedPwm,
100);
/* Software trigger to update registers */
FTM_SetSoftwareTrigger(BOARD_FTM_BASEADDR, true);
//GPIO_SetPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_B);
//GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_B);
// GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
}
void move_right(){
int i;
#if 1
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_A);
/* Start PWM mode with updated duty cycle */
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR1_B, kFTM_EdgeAlignedPwm,
100);
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR2_A, kFTM_EdgeAlignedPwm,
0);
/* Software trigger to update registers */
FTM_SetSoftwareTrigger(BOARD_FTM_BASEADDR, true);
//GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_B);
//GPIO_SetPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_B);
// GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
}
void move_forward(){
#if 1
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_A);
/* Start PWM mode with updated duty cycle */
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR1_B, kFTM_EdgeAlignedPwm,
9);
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR2_A, kFTM_EdgeAlignedPwm,
0);
/* Software trigger to update registers */
FTM_SetSoftwareTrigger(BOARD_FTM_BASEADDR, true);
//GPIO_SetPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_B);
//GPIO_SetPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_B);
// GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
}
void stop(){
int i;
#if 1
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_A);
GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_B);
for(i=12;i<=100;i=i+2){
/* Start PWM mode with updated duty cycle */
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR1_B, kFTM_EdgeAlignedPwm,
100);
FTM_UpdatePwmDutycycle(BOARD_FTM_BASEADDR, (ftm_chnl_t)MOTOR2_A, kFTM_EdgeAlignedPwm,
100);
/* Software trigger to update registers */
FTM_SetSoftwareTrigger(BOARD_FTM_BASEADDR, true);
DelayMs(200);
}
// GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR1_B);
//GPIO_ClearPinsOutput(BOARD_MOTOR_GPIO, 1U << MOTOR2_A);
// GPIO_SetPinsOutput(BOARD_LIGHT_GPIO, 1U << LIGHT_LED);
#endif
}
void delay_ms(int dly){
while(dly--){
DelayMs(255);
}
}






Comments