Real time 2*7 hour health care system:- Imagine your health data like heart beat , glucose level , and any health related data can be send any ware across the glober.But,Imagine that you have access to doctor 24*7 hour,The ups and Downs of your health can be monitored 24 hour. This data can be shared with A.I system and detect your health problem before it spreads to you and automatically that system finds best doctor for its treatment.Imagine a system by which a number of patients can be connected across globe with all doctors. That helps to monitor a number of patients at a single platform, that helps all the doctor to learn and know more about that disease and to find best treatment
Using the power of global connectivity of Soracom cellular IOT, we create a system by which the health data can be transferred with lightning speed all across the globe and that can be access by doctors in real time.we also create. A prototype of robot that can be connected and controlled from all across globe so that doctor can do a surgery from any were, even if he is present far away from patient.
So we are going to make a system that can harvest the body health data like heart rate on soracom harvest. this data can be shared with doctors available any were in world and treat you.
to harvest live health data we need a raspberry pi and soracom starter kit.
first we need to connect raspberry pi then install the scripts and settings for soracom using the following command.
sudo curl -O https://soracom-files.s3.amazonaws.com/starterkit/setup.sh
sudo chmod +x setup.sh
sudo ./setup.sh
After successful installation and setting the soracom. Now we create a python script to read data from heart sensor and with few change in soracom harvest example code we send the heart beat and blood oxygen data live to soracom harvest. After running the heart sensor data script to harvest the heart beat data and oxygen data. Now open the soracom console and harvest get the live data about from sensor.
So in this way we ca send live data about our health to any doctor any were in world and our health can be monitored by any doctor we want to.I have attached the example code but havenn't tasted because of some connection setting problem.
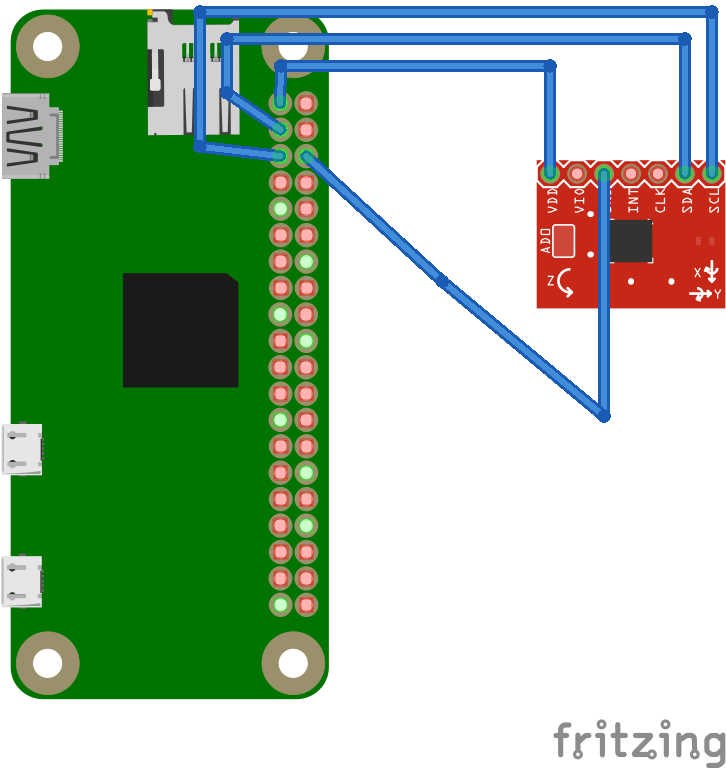
Now after that we can also a make a telepresense robot that can be control from any were in world. To control the robot live from anywere all we need is to transfer the movement and other command live. so her I have I have used a mpu6050 sensor to send the hand movement data to soracom that can be used for controlling robot arm from anywere.
Install the library for getting mpu6050 sensor data and then harvest the data to soracom.
Note :- Due the non availability of time late in getting coupan recharge for soracom I have't made full tested Code so Please modify or do some changes in code if get error.But this project will give all the overview of idea how to make this thing possible














{kind=link}

Comments