

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hello everyone, In this project I will show you How to make Esp8266 based IOT rader data logging sytem. Here this servo motor will rotate very slow because it needs a time to sends its every angle and distance data to cloud where the code was structured at those manner.So I have increased the speed of the video to show the rotation of servo motor. Also Everyone else asking me to How to inter face Ultrasonic sensor with Esp8266 or NodeMCU.
So all the error will be Cleared in this tutorial.
Componets
NodeMCU
UltraSonic Sensor
Servo Motor
jumper wires
Arduino UNO : to power up your UltraSonic Sensor
watch the video version of tutorial
Download the code from here
Here I'm not use the buzzer and proccessing IDE to make the sound and visualize the data. In my previous tutorial I had shown that version by using Arduino IDE. Although you can implement it by using NodeMCU I have attached the coding with that.
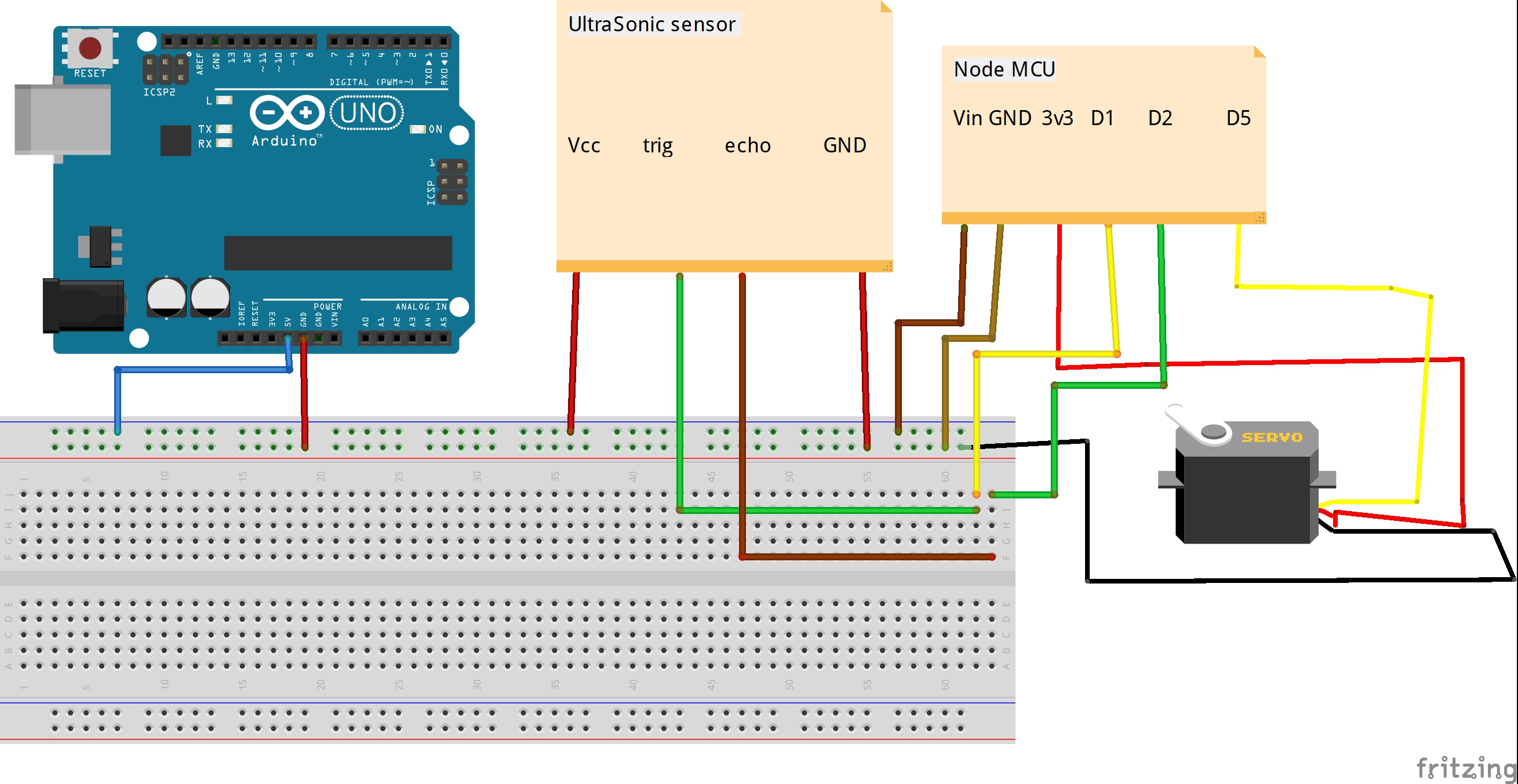
Nodemcu esp8266 12e works on 3.3 volts and its pins are also 3.3v TTL compatible. Where as ultrasonic sensor Hcsr04 works on 5 volts. We can not power Hcsr04 directly with nodemcu 3.3v power output pins.
Thanks UTSOURCE.net to offer electronic components for my projects
I used Arduino's 5 volts pin which can output 5 volts. 5 volts side of power supply is supplying power to hcsr04. Trigger and echo pins of hcsr04 ultrasonic sensor is directly connected to D1 and D2 pins of nodemcu
Here I have used the Spread sheet which I have already been created for my previous tutorial that how to Post data to google spread sheet. you check that post for clarification.
when you finished all the wiring and cloud connection part make sure to upload the code to your board. When the process finished You could see the data which are printing on Google spread sheet but the Servo motor rotation is very slow to compare between my Previous tutorial. because here we want to enter the each and every angle from servo to cloud so that the gap is the problem for delay of servo's rotation. So let I give you the work that change the coding to increase the speed of Servo. if it will have worked done leave it into the comment box.
Hope you have liked this post and don't forget to share between each others.









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments