

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
UV plays a major role in fighting against the virus and bacteria. Already so many products came on the market to serve the purpose but still there are some gray areas where we cannot use existing products or UV lamps directly. I decided to serve those gray areas with an intelligent, autonomous and low cost solution is called "UV Robotic Arm"
What is UV Robotic Arm?
It's a normal robotic arm enhanced with UV LED'S and sensors.This UV Robotic Arm is autonomous, portable and multipurpose. It can be used in any environment to disinfect the virus.
Why UV Robotic Arm?Today's situation everyone worries about safety and maintaining social distancing. There are many ways to take precautions like hand washing, sanitizer and avoid touching with hands etc. UV lights are one of the ways to disinfect the virus but mostly used in a closed environment due to safety reasons.
For example every office has printers, many people use the same printer and we cannot define a UV disinfection system for particular printers because printer design and sizes vary. This is the reason UV Robotic Arm came into picture where it can fit into any environment with flexibility. This UV can be aligned to any type of printer for disinfection with one time configuration.
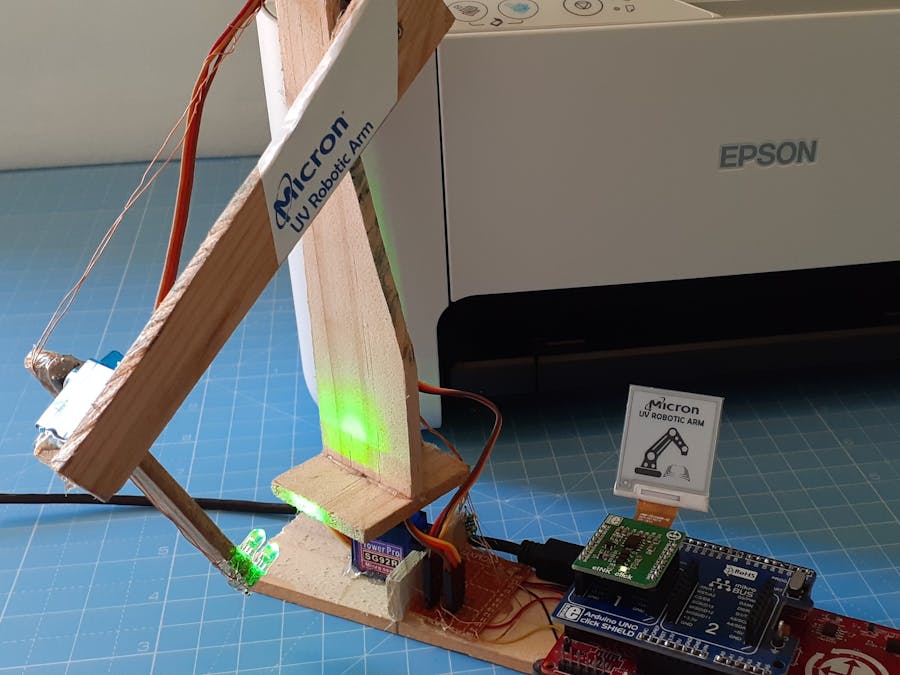
Designing Robotic ArmMy Initial thought was to have 4 wheels rover with Robotic Arm but unfortunately could not get the components on time. Finally I decided to build only the robotic arm with 3DOF. I ordered craft woods from amazon and created the ARM body with the help of a hacksaw blade and glue gun. I used Ada-fruit SG92R servo motors in the Arm. Two normal LED's are mounted on the top of the Arm.
This concept has a CapSense sensor so I chose the Cypress PSoC4M Series Kit. It comes with two CapSense Proximity sensors. To drive the Arm Servos I used 3 PWM channels. I used an E-ink display click module from Mikroe which is interfaced with PSoC4M through SPI. This display shows the Arm modes for configuration. All the wiring setup goes through normal pcb boards for servos and LED's. The coding was done from Cypress PSoC Creator.
EInk Pin conections:
MOSI - P6_0
CLK - P6_2
CS - P2_7
DC - P5_3
RES - P2_3
BSY - P1_0
Servosand LED's:
Servo1 - P2_1
Servo1 - P2_2
Servo1 - P2_3
GREEN LED - P2_0
RED LED - P0_6
This UV Arm operates in multiple modes, in this demo I have used 3 modes of operation.
1. Table Mode
2. Printer Mode
3. Gym Mode
Based on these modes robotic Arm's positions will be configured. It depends are where we going to use this UV Arm. Example if I want to use it for Gym equipment the Arm movements will be adjusted to the equipment design. Robotic Arm is flexible to use at any angle position.
What are the main Features?1. It's portable and can be used for any home appliance.
2. It can capable of doing routine task of cleaning (office workspace)
3. It's safe because it has sensors to detect the human presence
4. Robotic Arm is flexible to reach any hidden places.
5. Its capable to operate in any open environment
How it works?This Arm is portable, let's say we mounted on the table. If someone is using or touching the table this robotic Arm's sensor detects that and waits for the user to leave. After the user leaves this UV Arm starts and disinfects the table surface. This is autonomous and configurable. Configuration things can be extended to wireless or cloud.
Its low cost design and it can be installed in many places like offices, shops, malls, schools, churches etc.
In the demo I have just shown working with one direction disinfection but in practical we can have multi direction to clean the surface precisely.
The working demo is here.







Comments